Transcription
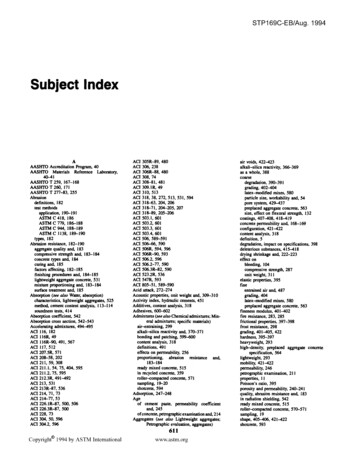
Technical DescriptionNew Robot System Successor, Realizing RemoteProduction and WorkingLabor shortages due to declining birth rates andpopulation aging have become a social problem. Inthis situation, utilizing robots and increasing the rateof their introduction are necessary for economicdevelopment.A new robot system, Successor, provides asolution that makes it possible to robotize operationsfor which it was previously difficult to deploy robotics,achieving manpower-saving and early automationbased on its “remote instruction” and “skillsuccession” core technologies. Successor has beenapplied to painting, grinding, and assemblingoperations, producing good results.IntroductionOne of the social challenges Japan faces is to addressthe nation’s workforce reduction. In addition, recent “workstyle reform” and prevention of COVID-19 infection havebecome social issues. In this context, the role of robots insociety is expected to change.1 BackgroundRegardless of workforce reduction, further use ofrobots is essential to aim for global-level economicdevelopment. However, the prevalence of robotscompared to the size of the workforce reduction haslargely fallen behind the target value 1).In fact, this trend is not limited to Japan. Robots are notsufficiently prevalent in any developed country. In otherwords, only a limited number of tasks have been robotizedin daily living and manufacturing processes.An increase in the types of tasks that can be robotizedleads to higher prevalence of robots. Therefore, we havebeen developing a new robot system to robotize moretasks.2 ConceptAs primary tasks that are difficult to robotize, wefocused on tasks related to small-scale production (e.g.,one-off production and small-lot production) as well astasks that require full use of human senses and skills.Successor is a strategic system that we developed to21apply robotics to such tasks.Successor consists of two core technologies, remoteinstruction and skill succession.(1) Remote instructionConventional industrial robots are operated in twophases: teaching to teach operations, and repeating torepeat them. For robots used on mass production lines,spending time on the teaching phase is worthwhilebecause the repeating phase is long. However, in the caseof the aforementioned tasks for small-scale production(e.g., one-off production and small-lot production), therepeating phase is short. For tasks that require full use ofhuman senses and skills, the teaching phase is enormous.Because the ratio of the repeating period to the teachingperiod is small in both cases, companies have beenreluctant to introduce robots for these tasks. A newmanner of using robots for such tasks is remoteinstruction, which does not separate the teaching phasefrom the repeating phase.During remote instruction, a worker in a locationremote from the robot controls the robot to perform tasksby leveraging his or her skills while feeling as if he or she ison site. When operating a large robot at high speed, whichis difficult with conventional coexistence collaborationrobots, remote instruction makes it possible to ensureintrinsic safety, to prevent production efficiency fromdecreasing, and to enable the worker to work with multiplerobots as shown in Fig. 1. This results in manpowersavings.
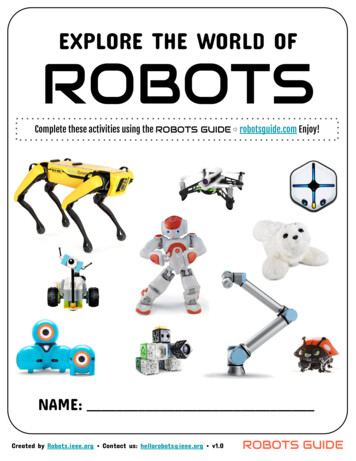
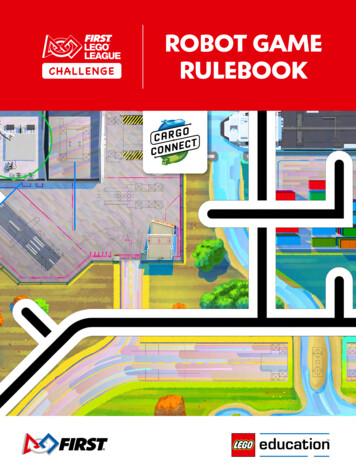
Fig. 1 Multiple robots remotely controlled by one worker(2) Skill successionThough remote instruction saves manpower by, forexample, freeing workers from “3D” (dirty, dangerous, anddemeaning) environments, the technology cannot fullyautomate jobs. Another feature of Successor, skillsuccession, enables unmanned jobs.Skill succession, which is shown in Fig. 2, is achievedthrough the following processes.① Accumulate sensing data passed to the worker, andaccumulate robot control data obtained throughremote instruction.② Have the robot learn the accumulated data, have therobot repeatedly carry out trials of autonomous robotoperation, and have the worker perform correctionoperations.③ Achieve autonomous operation by the robot alone.Although many instances of AIs can be seen in themanufacturing industry, such AIs have learned in advancefrom a large amount of prepared experimental data. Thismeans that a long preparation period is required until suchan AI can be introduced on site. In addition, even afterintroducing the AI on site, if a failure occurs, the line mustbe stopped and the learning process must be repeated.By contrast, Successor is a new type of AI robotsystem that performs OJL (on-the-job learning). OJL refersto repeatedly learning and carrying out actual tasks.Successor gradually increases the automation rate bysupporting tasks that require human senses and skillsthrough remote instruction, introducing the robot on site atan early stage, and learning the obtained data as shown inFig. 3. Even if learning is insufficient, problems such as lineshutdown can be prevented because people can assist therobot through remote instruction.3 Usage applicationsWe announced Successor at International RobotExhibition 2017, and we have subsequently developed avariety of element technologies, peripheral devices, andFig. 2 Automatic control achieved through skill successionKawasaki Technical Review No.183March 202222
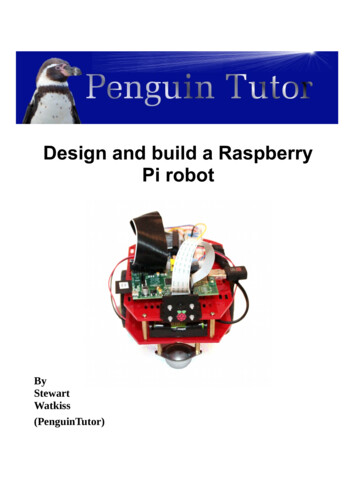
Technical DescriptionData collection, learning, and then evaluationafter going offline or stopping productionStart ofproduction by the robotTime(a) Conventional AI robot Start of production by remote instructionHumanLearninggradually matures.Robot Automation completeTime(b) SuccessorFig. 3 Differences between conventional AI robots and Successorapplication systems inside and outside the company.(1) Painting task based on the intuitions of full bodymotionSuccessor was put to practical use for the first time atan internal painting site. The painting task requires skills.The worker must use his or her entire body, including notonly the arms but also the knees, lower back, and legswhile making the most of the visual sense. In addition, thistask is conducted in a typical adverse environment inwhich the worker must wear a protective suit that coversthe entire body, suffering from bad odor and mist due tohot and humid conditions.We introduced Successor for painting the casting andsheet-metal parts in our industrial robot mother factory.This system allows a worker outside the painting booth tocomfortably complete the task, while visually checking theworkpiece type and spraying conditions as shown in Fig. 4.We developed Wizard, which uses VR equipment, asthe controller (communicator) so as not to obstruct theintuitions of the worker, who uses his or her entire body.When the same workpiece is in process again, the workercan switch to repeated operation.(2) Grinding task using force sense control technologyFor tasks associated with contact with workpieces(e.g., assembly and machining), the force sense as well asthe visual sense must be conveyed to enable the remoteworker to perceive the task. In particular, although grindingis performed in an adverse environment with powder dust,vibration, noise, and hard tasks, automation has beendifficult because work quality largely depends onControllerWizardFig. 4 Painting operation using Successor adapted for coating23
sensations felt by the hands. Therefore, we developedSuccessor-G for grinding as shown in Fig. 5.Successor-G is equipped with a grinding tool. This largerobot also has a force sensor at the end, which conveysthe force sense during the task to the remote controller sothat he or she can control the robot in order to completethe task. We are also attempting to leverage 5Gcommunication to control this system across remotelylocated factories.(3) Assembly task using the AI control technologyWe have been attempting to introduce Successor’s skillsuccession technology into the assembly of multi-controlvalves for hydraulic equipment at our precision machinefactory.During this assembly task, “spools,” which are stickshaped parts with different lengths and shapes, areinserted into clearance holes (diameter: severalmicrometers) on the casing. The worker cannot visuallycheck the contact state and must insert the spools whilechecking how they are inserted by the force sense in his orher hands. Such assembly requires mastery because theclearances are also small. The skill succession functionachieved work performance equivalent to when a skilledworker controls the robot as shown in Fig. 6.To realize autonomous operation with the skillsuccession function, we first performed the assembly taskwith work performance equivalent to that of a human byusing the remote instruction function, and we had therobot learn the task from control data obtained byFig. 5 Grinding operation using Successor-GFig. 6 Inserting a spool manuallyKawasaki Technical Review No.183March 202224
Technical Descriptionperforming several tasks. The resulting autonomousoperation achieved a success rate of over 90% forinsertion. If the spool is not inserted after a certain amountof time due to an unexpected incident, another workerwho performs a different task switches to remoteinstruction mode and continues the task. Through OJLusing the skill succession function shown in Fig. 7, thesystem additionally learned to take action to respond tounexpected incidents from data on the tasks that theworker took over to perform, thus improving the taskFig. 7 On the Job LearningCaringStoreRestaurantFig. 8 Image of eRoboWorkCommunication faceDual-armGeneral-purpose handElevating bodyMovementin all directionsFig. 9 Platform robot, Nyokkey25
success rate to 99%.Doctor of EngineeringProfessional Engineer (Mechanical Engineering)Masayuki Kamon4 Next steps for a safe and securenetwork societyThe decrease in the working population is a serioussocial problem. The number of workers has continued todecrease and caused a shortage of successors, particularlyfor work in dangerous workplaces. The recent COVID-19pandemic has led to broader use of remote work amongoffice workers. Meanwhile, people who can only work onsite, such as essential workers and skilled workers inmanufacturing, still cannot work remotely.We have been working to propose a new way ofworking by which every worker can work remotely withthe remote robot technology called eRoboWork shown inFig. 8. We also founded a new company with Sony Groupin order to provide a platform service for this remote robotoperation system. We plan to accelerate promotion of workstyle reform by leveraging the two parent companies’technologies. We developed Nyokkey shown in Fig. 9 as ageneral-purpose robot platform to realize this eRoboWork.Nyokkey brings together: ① the technology to coexist withpeople from our industrial Dual-arm SCARA Robot duAro 2),② a communication system that employs the remotecontrol technology and AI of Successor, ③ the elevatingbody of life-size humanoid robot Kaleido, ④ our proprietarygeneral-purpose hand, and ⑤ the vehicle technology of ourmotorcycle Ninja and off-road four-wheeler TERYX. As thecontrol software, we have adopted unique software that isfriendly to academia and startup engineers based on ROS,which is a software platform for robots, rather thanindustrial robot software for professionals.ConclusionAs the working population decreases, in addition tochanges in usage of robots, people’s ways of working arediversifying, which requires new work styles.Meanwhile, industrial robots have freed people fromadverse environments and simple repeated tasks underlimited conditions—namely, mass production in themanufacturing industry. In the future, people will be freedfrom conventional work styles as robot systems thatInnovative Technology Department,Product Planning Group, Robot Business Division,Precision Machinery & Robot CompanyHaruka AsakawaInnovative Technology Department,Product Planning Group, Robot Business Division,Precision Machinery & Robot CompanyHitoshi HasunumaICT System Department,System Technology Development Center,Corporate Technology Divisionenable remote work provide job opportunities to peopleregardless of work conditions, such as their physicalabilities and places of residence.The new era requires a social system in which peopleassist and train robots as well as coexist and prosper withsuch robots. Successor and eRoboWork enable you toachieve these goals.We will realize these systems and put them intopractical use to achieve a safe and secure network societyfor people around the world.Reference1) World Robotics 2017 (the number of industrial robotsused for 10,000 employees in the manufacturingindustry), IFR Bureau of Statistics (2017)2) “A Collaborative Dual-arm SCARA Robot, duAro,Provides a Production System That Allows HumanBeings and Robots to Work Together: DevelopmentConcept and Applications,” Hirata, Suzuki, Murakami,Hibino, Takebayashi, Kanbara, Kawasaki TechnicalReview No. 178, pp. 9-14 (2017)Kawasaki Technical Review No.183March 202226
motorcycle Ninja and off-road four-wheeler TERYX. As the control software, we have adopted unique software that is friendly to academia and startup engineers based on ROS, which is a software platform for robots, rather than industrial robot software for professionals. Conclusion As the working population decreases, in addition to