Transcription
MEAM 520MEAM 520Introduction to RoboticsIntroduction to RoboticsOutlineu What is a robot?u Historyu Anatomy of a robotu Trends in robot automationu Robot industry in the U.S. and in the worldu ApplicationsVijay KumarUniversity of PennsylvaniaPhiladelphia, PAllUniversity of Pennsylvaniamanufacturing automationservice industryUniversity of Pennsylvania1MEAM 520MEAM 520What is a robot?uHistoryWebsteruAn automatic apparatus or device that performs functions ordinarilyascribed to humans or operates with what appears to be almost humanintelligence.uOrigin of the word “robot”lllRobotics Institute of AmericauA robot is a reprogrammable multifunctional manipulator designed tomove material, parts, tools or specialized devices through variableprogrammed motions for the performance of a variety of tasks.Czech word “robotnik”1920 play by Karel Capek1940s - Isaac Asimov’s science fictionHistory of automationllIndustrial revolution (late 18th century)Mechanical loomsttlllUniversity of PennsylvanialuuuCrane with motorized grippers (1892)Mechanical arm for spray painting (1938)Telecheric/teleoperators (World War II)University of PennsylvaniaMEAM 520MEAM 520HistoryHistoryuEniac (University of Pennsylvania)Whirlwind (MIT)uuNumerically controlled machine tool (1952)Robot with playback memory (1954)First industrial robot (1962)University of Pennsylvania4Walking robotsFirst large scale electronic computer (1946)lJacquard loomsProgrammable looms3Advent of computersu2uu5Ralph Moser’s walking machine (1967)Odetics’ Hexapod (1983)Adaptive Suspension Vehicle (1985)Ambler (1993)Humanoid (1997)University of Pennsylvania6
MEAM 520MEAM 520The Honda HumanoidUniversity of PennsylvaniaThe Honda HumanoidUniversity of Pennsylvania7MEAM 5208MEAM 520The Honda HumanoidWhat is a robot?Definition of a robot revisitedlmanipulate objects in the physical worldlsense information about the physical worldmake decisions based on available information or ask for additionalinformationinterface in a “friendly”manner with humansmimic humansreprogrammable by humanssafetllllltUniversity of Pennsylvania9MEAM 520Asimov’s laws of roboticsUniversity of Pennsylvania10MEAM 520Definition of a robotAnatomy of a robotThe robot is a computer-controlled device that combines thetechnology of digital computers with the technology of servocontrol of articulated chains. It should be easily reprogrammed toperform a variety of tasks, and must have sensors that enable it toreact and adapt to changing conditions.l Docompare this to a PC manipulating dataindustrial robots satisfy this definition?robots?Basic componentsu the mechanical linkageu actuators and transmissionsu sensorsu controllersu user interfaceu power conversion unitl ServiceUniversity of Pennsylvania11University of Pennsylvania12
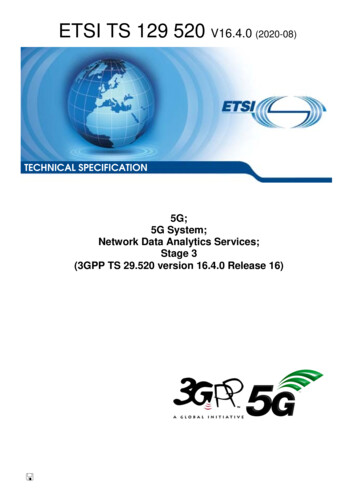
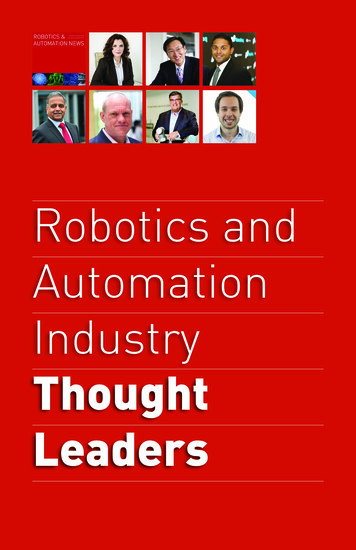
MEAM 520MEAM 520Anatomy of a robotThe Seiko RT33Manipulator linkageThe manipulator consists of a set of rigid links connected by joints. The jointsare typically rotary or sliding. The last link or the most distal link is called theend effector because it is this link to which a gripper or a tool is attached.Sometimes one distinguishes between this last link and the end effector that ismounted to this link at the tool mounting plate or the tool flange.The manipulator can generally be divided into al regional structurel orientational structureAn industrial robot with a spherical workspaceUniversity of PennsylvaniaUniversity of Pennsylvania13MEAM 52014MEAM 520The Stanford ArmSCARA ManipulatorThe Adept 1850 Palletizerll3Cylindrical workspaceApplications in assembly, palletizing21Axes 4, 5, 6Research prototype developed by Stanford University (1960’s)University of Pennsylvania15University of PennsylvaniaMEAM 52016MEAM 520Anatomy of a robotTransmissionsELBOWJ OINTActuatorsu linear or rotaryu electric, hydraulic, pneumaticPASS IVEJ OINTSTransmissionsu to convert rotary to linear motion or linear to rotary motion.u to convert the actuator output into a form that is suitable fordriving the robot linkage.u to locate actuators away from the joints.ACTUATORFO R THE ELBOWS HOULDERJ O INTBAS ES WIVELThe regional structure for the Cincinnati Milacron T-3 robotUniversity of Pennsylvania17University of Pennsylvania18
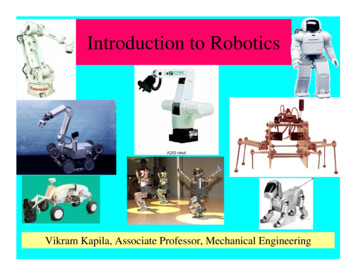
MEAM 520MEAM 520Parallel robot manipulatorsParallel robot manipulators (continued)The Stewart PlatformlllPlanar parallel manipulatorsflight simulators, test rigsNIST high-performance manufacturing cellIngersoll-Rand machinelllllEND EFFECTORLeg 5Leg 4capable of movements in the horizontal planehigh strength to inertia ratiohigh stiffnessEND-E FFE CTORlimited workspacemore complicatedSACTUATORSLeg 6Leg 3Leg 2PLeg 1BASELeg iSUniversity of PennsylvaniaUniversity of Pennsylvania19MEAM 52020MEAM 520Anatomy of a robotAnatomy of a robot manipulatorControllerSensorsu to know the position of each joint in the mechanical linkagelpotentiometers, encodersuto measure the velocity and/or acceleration at each jointuto measure the forces and moments exerted by the endeffector or the torques/forces exerted by each actuatorto detect objects or features in the environmentlulThe controller provides the intelligence that is necessary to control themanipulator system.l memory to store the control program and the state of the robot systemobtained from the sensorsl a computational unit (CPU) that computes the control commandsl the appropriate hardware to interface with the external world (sensors andactuators)l the hardware for a user interfacetachometers, accelerometersvision sensors (cameras, laser range finders), accoustic sensors(ultrasonic ranging systems), touch sensorsUniversity of Pennsylvania21MEAM 520University of Pennsylvania22MEAM 520A rotary joint actuated by a DC motorAnatomy of a robot manipulatorThe user interfaceThis interface allows use a human operator to monitor or control the operation ofthe robot. It must have a display that shows the status of the system. It must alsohave an input device that allows the human to enter commands to the robot.The power conversion unitThe power conversion unit takes the commands issued by the controller whichmay be low power and even digital signals and converts them into high poweranalog signals that can be used to drive the actuators.University of Pennsylvania23University of Pennsylvania24
MEAM 520MEAM 520ControllerA linear, electropneumatic actuatorExampleUniversity of PennsylvaniaUniversity of Pennsylvania25MEAM 520MEAM 520Stock of industrial robots by year-end in w ZealandNorwayPolandRepublic of KoreaSingaporeSpain*SwedenSwitzerlandTaiwanFormer USSR *United KingdomUnited StatesSlovakiaCzech 304, 48Trends in robot 47,0005896,622118uU.S. salesullluDramatic increase in sales in Asia (excluding Japan)for the first half of 1997 - 6,275 robots, 548 millionMarket for robots and accessories is estimated at 1.5 billion annualAnnual sales in Japan is 36,000, while the same in U.S.A., U.K.,Germany, France and Italy is 23,000.571,88627University of Pennsylvania28MEAM 520Trends in U.S. robot automationuuuMEAM 520uuU.S. is the second largest robot user behind JapanJapan installed more robots annually in 1990-1992 than the totalthat U.S. installed in the 32 years from 1962-1992Annual sales of robots peaked at 80,000 in 1990 and then fell to56,000 in 1993Annual growth rate in 1995-2000 was around 15%u1,7621,6932,562University of Pennsylvaniau26Robot sales in the U.S.First industrial robot was installed by Unimation in 1961Many big companies (e.g., Westinghouse, General Motors,Cincinnati Milacron and General Electric) entered the roboticsbusinessToday, the only industrial robot manufacturer is AdeptAlthough the U.S. is a distant second to Japan in using robots, it iscatching uplThe main cause is labor shortageUniversity of Pennsylvania29University of Pennsylvania30
MEAM 520MEAM 520Application of Robotics in the U.S.Robot industry in JapanuuThe Japanese robot industry was 3.6 billion in 1991 and estimatedto grow to 11.9 billion by 2000Japanese robot manufacturersManufacturerMatsushita Electric Industry(MEI)Fuji Machine ManufacturingFanucYasakawa Electric ManufacturingKawasaki Heavy IndustriesUniversity of PennsylvaniaMEAM 520uMEAM 520Labor growth in Japan is estimated to be 0.4% annually from 1994 to 2000.In 2000, 15% of the work force will be over 65.Robots are extensively used in the manufacturing of automobiles,electronic goods and semiconductors.llll“.service robotics will surely outstrip industrial robotics”- J. Engelberger, 1990u Space roboticsHuman operators on earth can control partially autonomous vehicles andmanipulators on distant planetsushorter production lineslower capital cost per unit productmore flexibilitysave labor costsUniversity of PennsylvaniaHazardous environmentslllldismantling radioactive or toxic equipment/weaponsmanufacture of chemicals, explosivessubsea exploration, salvagedeminingUniversity of Pennsylvania33MEAM 520New applications in robotics (continued)Virtual realityuRobot technology allows the user/operator to feel the virtualenvironment and exert forces on it.uuMilitary ApplicationsltlCars are being equipped with increasingly sophisticated sensors,navigation systems and controllerslairborne (drones)land based HUMMERSGo where no man (human) can gottMedical RoboticslUnmanned vehiclestHighwaysl34MEAM 520New applications in robotics (continued)u32New applications of roboticsThe major reasons for growth in this industry are a Japanese laborshortage and strong investment by industry and the government.l8.35.45.33.4University of Pennsylvania31Japanese robot industryuPercentage ofJapaneseproduction16.5urban environmentsground based attacksthe surgeon directs the robot to make controlled, high-precisionincisionslaproscopic surgery involves inserting a micro-robot through a smallincision in the body and teleoperate it to perform surgery, suturing,etc.University of Pennsylvania35University of Pennsylvania36
MEAM 520MEAM 520Military applications in robotics (continued)University of PennsylvaniaMilitary applications in robotics (continued)37MEAM 520lvocational assistants for paraplegicspersonal assistant at homeuDomestic companionsuEntertainment robotslllluPersonal Robots?Personal care for disabled peoplelu38MEAM 520New applications for roboticsuUniversity of PennsylvaniaHonda Humanoidhttp://www.personalrobots.comDisney theme parks, Universal studiosMotion picturesFord uses robot to sell cars (salesrobots)Custodian robotsRobot attendants at gas stationsUniversity of Pennsylvania39MEAM 52040MEAM 520Domestic Companions?Domestic Companions?Kismet, MIT AI LabUniversity of PennsylvaniaUniversity of PennsylvaniaCog, MIT AI Lab41University of Pennsylvania42
MEAM 520The Honda HumanoidUniversity of Pennsylvania43
Trends in U.S. robot automation u First industrial robot was installed by Unimation in 1961 u Many big companies (e.g., Westinghouse, General Motors, Cincinnati Milacron and General Electric) entered the robotics business u Today, the only industrial robot manufacturer is Adept u Although the