Transcription
850ArtículoRevista de Tecnología e InnovaciónSeptiembre 2015 Vol.2 No.4 850-855Construcción de un robot tipo PUMA de 3 grados de libertadDE ANDA-Rosa†, VALLE-Pablo, ACEVEDO-Francisco & LOPEZ-JoséRecibido 20 de Julio, 2015; Aceptado 11 de Septiembre, 2015ResumenAbstractA medida que se ha mejorado la tecnología, se han desarrolladomáquinas especializadas para ejecutar diversas tareas. Lamayoría de los robots existentes en nuestros días son aquellosque son utilizados en la industria, llamados robots industriales,los cuales están constituidos por uno o más brazos. El brazorobótico presentado a continuación consta de tres ejes paramovilizarse, 3GDL, y utilizarlo para una aplicación industrialo ya sea para una aplicación especial, especialmente paraaspectos didácticos. Para su construcción se utiliza softwareespecializado, SolidsWorks para el diseño, y vinculadocon Matlab y SimMechanics. LabView, para la comunicaciónvirtual y física, se utilizó una tarjeta Arduino para proporcionarel enlace entre los motores y el software, en la actualidad serealizan pruebas con la tarjeta Compaq Rio NI para mejorar lacomunicación. La relevancia de este proyecto es elanálisisdinámico, diseño, fabricación y programación, todo elproceso se llevó a cabo dentro de las instalaciones de laUniversidad.Construction of a PUMA robot type 3 degrees of As technologyhas improved, specialized machines have been developed toperform various tasks. Most existing robots today are thosewhich are used in the industry, so-called industrial robots,which are constitutedbyoneormorearms.The robotic arm, PUMA (Programmable Universal Machine forAssembly , or Programmable Universal Manipulation Arm) ,for its acronym in English, which is presented below consistsof three axes to move , 3GDL ( degree of freedom) , where itwas considered essentially for teaching purposes , purchase aindustrial type robot is very expensive , so it becomes viabledevelopment and make it available to the lab, so that studentsachieve their associated practices. To construct specializedsoftware was used for design SolidsWorks , and linked withMatlab SimMechanics. LabView, for virtual and physicalcommunication, arduino one card was used to provide thelink between engines and software, currently tests are done withthe Compaq Rio NI card to improve communication. Therelevance of this project is the dynamic analysis, design,manufacturing and programming, and the whole process wasconducted within the premises of the University.Robot, GDL, Programación, Diseño, ramming,design,Citación: DE ANDA-Rosa, VALLE-Pablo, ACEVEDO-Francisco & LOPEZ-José. Construcción de un robot tipo PUMAde 3 grados de libertad. Revista de Tecnología e Innovación 2015, 2-4:850-855† Investigador contribuyendo como primer autor. ECORFAN-Boliviawww.ecorfan.org/bolivia
851ArtículoRevista de Tecnología e InnovaciónSeptiembre 2015 Vol.2 No.4 850-855IntroducciónCuando escuchamos la palabra Robot,pensamos en esas películas que nos hansorprendido por presentarnos robots querealizan acciones superiores a las capacidadesdel ser humano. Quizás los modelos másfamosos de robots han sido los creados porGeorge Lucas en su película Stars Wars aquienes conocimos como C3PO y R2D2. Sinembargo, la idea que nos presentan las películasse encuentra bastante alejada de la aplicaciónindustrial de los robots, a los cuales se lesconsidera como un tipo de máquinasherramientas (Ogata, 2003). El siglo XVIIIconstituye la época del nacimiento de larobótica industrial. Hace ya más de doscientosaños se construyeron unas muñecas mecánicas,del tamaño de un ser humano, que ejecutabanpiezas musicales. Sin duda, hoy se puedeafirmar que el desarrollo de las máquinasherramientas ha sido sumamente acelerado.Unimation produjó PUMAs durantealgunos años hasta que fue absorbida porWestinghouse (ca. 1980), y posteriormenteporlaempresa suiza Stäubli (1988)(Barrientos, Peñín, alaguer, & Aracil, 1997).La Universidad Tecnológica cuenta,actualmente con un brazo robótico, marcaMotoman, de seis grados de libertad, la grandesventaja con la que se trabaja es que losmodelos comerciales cuentan con un entornodeterminado de trabajo, un modelo deprogramación y tipos de controladoresdeterminados por el fabricante.Esta situación empobrece el proceso deaprendizaje, el programa de estudios requiereque los alumnos desarrollen el diseño de unrobot, desde su diseño conceptual, sumanufactura, su fabricación y el diseño ydesarrollo de la parte de control.Un robot industrial es un manipuladormultifuncional reprogramable, capaz de movermaterias, piezas, herramientas, o dispositivosespeciales, según trayectorias variables,programadas para realizar tareas diversas(Barrientos, Peñín, alaguer, & Aracil, 1997).El objetivo de este trabajo es generarel diseño y la construcción de un robot tipoPUMA con 3 GDL, que permita brindarversatilidad en la etapa de control y entornosde programación, quefueradidáctico,ubicándolo en el laboratorio de robótica dela institución para que sea utilizado por losestudiantes de la materia.Un robot tipo PUMA (ProgrammableUniversal Machine for Assembly, orProgrammable Universal Manipulation Arm) esun brazo robot industrial desarrollado por VictorScheinman en la empresa pionera en robóticaUnimation. Inicialmente desarrollado paraGeneral Motors, el brazo robot PUMA nació delos diseños iniciales inventados por Scheinmanmientras se encontraba en el MIT y en laStanford University.En la sección de la metodología sepresentan las técnicas utilizadas para resolverel problema, es importante hacer notar que laparte importante del trabajo es el desarrollo dehabilidades en técnicas de ocntrol y diseño,que aunque no son nuevas en el ámbito sí parala Universidad.ISSN-2410-3993ECORFAN Todos los derechos reservados.En la sección de resultados semuestran los diseños del mecanismo y elcontrol que se construyó por losinvestigadores.DE ANDA-Rosa, VALLE-Pablo, ACEVEDO-Francisco & LOPEZJosé. Construcción de un robot tipo PUMA de 3 grados de libertad.Revista de Tecnología e Innovación 2015
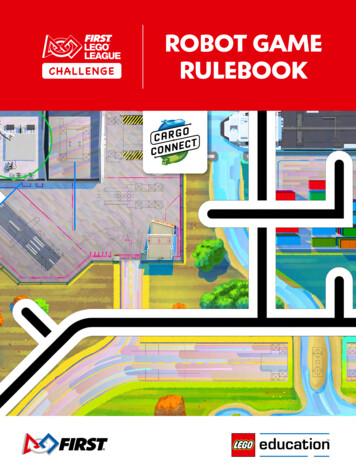
852ArtículoRevista de Tecnología e InnovaciónSeptiembre 2015 Vol.2 No.4 850-855En la parte de conlcusiones se presentael logro obtenido, así como los trabajosfuturos y sus aplicaciones.Metodología a desarrollarUn robot se compone principalmente de trespartes: parte mecánica (forma y tamaño de lacarcasa), parte electrónica (compuesta por elcircuito de control y sensores del robot) y laparte de potencia (control de servomotores delrobot). La carcasa constituye la parte mecánica,la forma de ésta es uno de los factoresdeterminantes en el éxito del desarrollo de unadeterminada tarea. La parte electrónica estáconstituida por el circuito de control que a suvez contiene un microcontrolador el cual seprogramaempleandoundeterminadoalgoritmo, en dicho algortimo radica todas lasdecisiones que va a efectuar el robot antedeterminados casos dados de acuerdo alproblema (Hutchinson, Vidyasagar, & Mark,2001).Modelo del robotLa estructura a utilizar se basa en un robotPUMA de 3grados de libertad (GDL)rotacionales, de modo que el modelo dinámicodel robot resulte más sencillo y manipulablepara efectuar el control y se evite redundanciaen la medida de lo posible.Bajo las siguientes especificaciones,mostradas en la tabla 1:Tabla 1 Especificaciones del robot PUMA de 3 GDLEl modelo del robot se obtuvo de 2maneras, utilizando la aplicación Simechanicsdel Matlab, y a través del modelo matemáticode Lagrange.Se obtuvo un modelo a través de laherramienta de cálculo Matlab, trabajandosobre el diseño mecánico hecho medianteSolidworks, obteniendo el siguiente diagrama,el cual considera cada una de las juntas delrobot, como se aprecia en la figura 1.CaracterizaciónConociendo las variables de las articulaciones,se determinará la posición del extremo delantebrazo en el PUMA . Las variables de lasarticulaciones son los ángulos entre loseslabones en el caso de articulacionesrotacionales, y la extensión del eslabón en casode articulaciones prismáticas o deslizantes, seutilizará la propuesta de análisis de DenavitHartenverg.Modelo DinámicoSe hará uso de las ecuaciones de movimiento deLagrange para obtener el modelo dinámico delmanipulador (Kelly & Santibáñez, 2003).ISSN-2410-3993ECORFAN Todos los derechos reservados.DE ANDA-Rosa, VALLE-Pablo, ACEVEDO-Francisco & LOPEZJosé. Construcción de un robot tipo PUMA de 3 grados de libertad.Revista de Tecnología e Innovación 2015
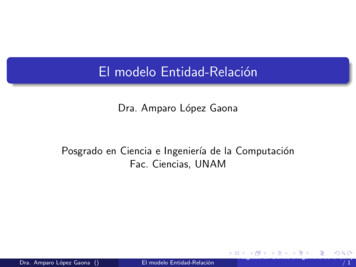
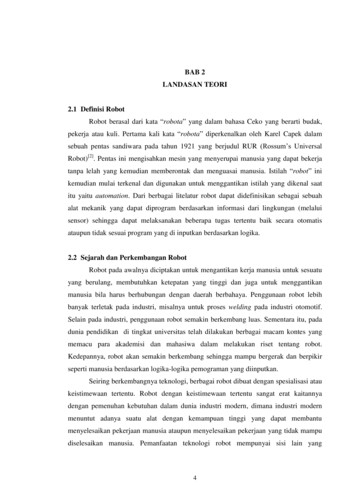
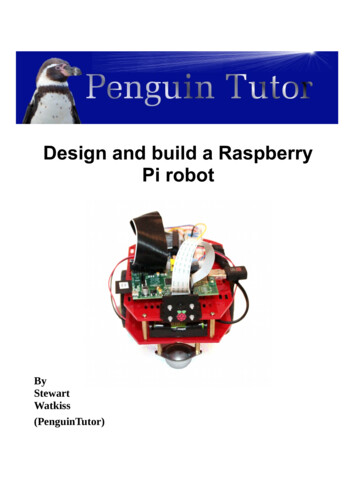
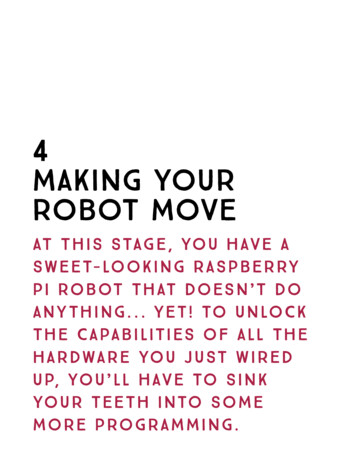
853ArtículoRevista de Tecnología e InnovaciónSeptiembre 2015 Vol.2 No.4 850-855ResultadosEl significado de las diversas constantes asícomo sus valores numéricos están resumidos enla tabla 2.Figura 1 Diseño CAD de robot tipo PUMA DE 3GDLDerivado del análisis dinámico delbrazo se obtuvieronlossiguientesresultados, como se observa en la figura 2,elanálisisserealizóen Matlab ySimmechanics:Tabla 2 Parámetros del PUMAEs importante hacer notar que el diseñose realizó, utilizando el software Solid Works,para enlazarlo con Simmechanics y Mat lab,para realizar el análisis cinemático, directo einverso, así como la dinámica.El diseño del robot se puede apreciar en lafigura 1.Figura 2 Análisis dinámico del brazoISSN-2410-3993ECORFAN Todos los derechos reservados.DE ANDA-Rosa, VALLE-Pablo, ACEVEDO-Francisco & LOPEZJosé. Construcción de un robot tipo PUMA de 3 grados de libertad.Revista de Tecnología e Innovación 2015
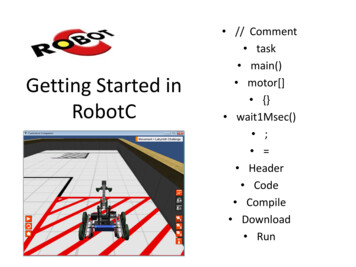
854ArtículoRevista de Tecnología e InnovaciónSeptiembre 2015 Vol.2 No.4 850-855Movimiento de las articulacionesEl movimiento que se obtuvo en lasarticulaciones se muestra en la tabla 3, en lafigura 3 se muestra el rango de operación delbrazo diseñado.Figura 4 Poleas cintura, Poleas hombroSistema electrónico y de controlTabla 2 Especificaciones del movimiento de lasarticulacionesEn la parte de la electrónica, se diseñó unatarjeta externa de potencia, ya que la tarjetaseleccionada que fue la arduino UNO nosoportó el torque requerido por losservomotores. Para la parte de control se utilizauna tarjeta arduino y software de control LabView, es importante mencionar que se requirióde una etapa de potencia, ya que la tarjetaarduino no soportó la potencia requerida por losservomotores, como se muestra en la figura 5.Figura 5 Control y potencia del robot para un sevomotorFigura 3 Rango de OperaciónSistema de transmisiónLa figura 4 muestra las poleas dentadas de altotorque que transmiten el movimiento de losmotores hacia las articulaciones de la cintura,hombro y codo. Para los tres movimientos seusan poleas dentadas en dos etapas paraaumentar las reducciones y sus respectivostensores. La elección de las bandas se hizotomando en cuenta los criterios propuestos porel fabricante (FACE, 2001).ISSN-2410-3993ECORFAN Todos los derechos reservados.En la figura 6 se muestra el prototipode trabajo, el cual fue diseñado, manufacturado,y al que se le aplican los sistemas de control,utilizando como herramienta de trabajo unacomputadora personalDE ANDA-Rosa, VALLE-Pablo, ACEVEDO-Francisco & LOPEZJosé. Construcción de un robot tipo PUMA de 3 grados de libertad.Revista de Tecnología e Innovación 2015
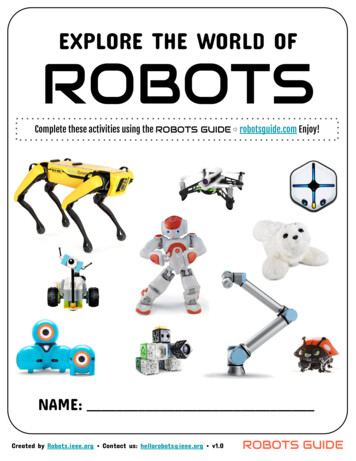
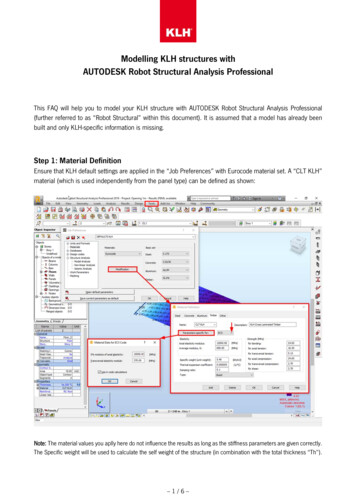
855ArtículoRevista de Tecnología e InnovaciónSeptiembre 2015 Vol.2 No.4 850-855Se debe siempre tener en cuentala relación de masa-longitud para cadaelemento- eslabón y así no exigir demasiadotorque a los eslabones de la base. Actualmentese sigue desarrollando la plataforma decomunicación con Lab dedécimocuatrimestre ya se encuentran trabajando coneste modelo, han desarrollado plataforma deprogramación, comunicación, y actualmente seestá desarrollando la comunicación utilizandousb, se espera generar una comunicaciónutilizando wifi.ReferenciasBarrientos, A., Peñín, L. F., alaguer, C., &Aracil, R. (1997). Fundamentos de robótica.Madrid: Mc Graw Hill/interamericana deEspaña, S.A.FACE. (2001). Catálogo Face. MechanicsStandard CoFactory Automation .Hutchinson, S., Vidyasagar, M., & Mark, W.(2001). Robot Modeling and Spong.Figura 6 Prototipo del robottipo PUMA de 3GDLAgradecimientoOgata, K. (2003). Ingeniería de controlmoderna. Pearson.El trabajo fue apoyado por el PROMEP CA-2, IDCA: 9786 por lo que usionesSe logró realizar el diseño y la manufactura delbrazo robótico tipo PUMA de 3GDL, asímismo se siguen en pruebas para poderidentificar cuál es el mejor control que se puedetener, se está desarrollando la interfase decontrol tanto física como virtual.ISSN-2410-3993ECORFAN Todos los derechos reservados.DE ANDA-Rosa, VALLE-Pablo, ACEVEDO-Francisco & LOPEZJosé. Construcción de un robot tipo PUMA de 3 grados de libertad.Revista de Tecnología e Innovación 2015
José. Construcción de un robot tipo PUMA de 3 grados de libertad. Tecnología e Innovación 2015 En la parte de conlcusiones se presenta el logro obtenido, así como los trabajos futuros y sus aplicaciones. Metodología a desarrollar Un robot se compone principalmente de tres partes: parte mecánica (forma y tamaño de la