Transcription
WSEAS TRANSACTIONS on SYSTEMS and CONTROLSubhransu PadheeController Design for Temperature Control of Heat ExchangerSystem: Simulation StudiesSUBHRANSU PADHEENational Institute of TechnologyDepartment of Electronics and Communication EngineeringRourkelaINDIAsubhransu padhee@yahoo.comAbstract: This paper analyzes the performance of different controllers such as feedback, feedback plusfeed-forward and internal model controller to regulate the temperature of outlet fluid of a shell and tube heatexchanger to a certain reference value. The transient performance and the error criteria of the controllers areanalyzed and the best controller is found out. From the simulation results, it is found out that the internal modelcontrol outperforms feedback PID and feedback plus feed-forward controller.Key–Words: Feedback controller, Feedback plus feed-forward controller, internal model controller1Introductionof measurement noise [3] and tradeoff betweenrobustness and performance [4]. Tuning of PIDcontroller is a wide area of research [5] with manytuning rules where the main objective is to formulatesuch a tuning rule which can be characterized fromthe mathematical model of the system. The threeparameters of PID controller are mostly tuned byempirical tuning rules like Ziegler-Nichols but thismethod is not always suitable for every kind ofprocess dynamics [6]. The process has also its owndynamics such as some process have long dead time,some process have oscillatory behavior and someother process can be unstable. So there are differentset of conditions and different set of tuning rulesfor each and every process dynamics. Many modelbased controller techniques such as internal modelbased control [7, 8], dynamic matrix control [7, 8] areused in conjunction with PID controller to improvethe dynamic response of the process. Apart fromthe conventional techniques of controller tuning thereare many soft computing based intelligent tuningrules. Fuzzy control [9] is gaining fast acceptancein control domain due to its superior performance.Many researcher have worked towards optimizingthe tuning parameters using different optimizationtechniques like evolutionary optimization technique[10] and swarm optimization techniques [11].Design of controller for any regulatory or servoproblem is one of the challenging tasks due tomany aspects. To design a controller, an accuratemathematical model is required which can be obtainedeither from first principle model or from black boxsystem identification experiment [1]. A controllerhas two distinct objectives such as set-point trackingand load disturbance rejection. Set-point trackingis a major issue in servo control whereas the mainfocus area of regulatory control is load disturbancerejection and to maintain steady state conditions.Apart from the mathematical model of the process thesystem designer has to consider various other aspectslike process uncertainty, measurement noise, androbustness of system while developing a controller.Skogestad [2] reported that, control of a process canbe classified as either smooth control or tight control.Tight control technique gives a fastest way of controlwhich will result in an acceptable robustness whereas smooth control gives the slowest possible controlwhich produces a good disturbance rejection property.Proportional-Integral-Derivative (PID) controller,the most commonly used controller finds wide spreadapplications in various areas of automatic control.Though there are several high end controllers superiorto existing PID and its variants, the simplicity andproven track record of PID controller makes it anobvious choice for most of the control problems.While developing a PID type controller (PI orPD) different practical consideration has to takencare off. These practical concerns are filteringE-ISSN: 2224-2856In this paper, the performance of different controltechniques such as feedback PID, feedback plusfeedforward control and internal model control areanalyzed to control a regulatory control process.Set-point tracking and load disturbance rejection485Volume 9, 2014
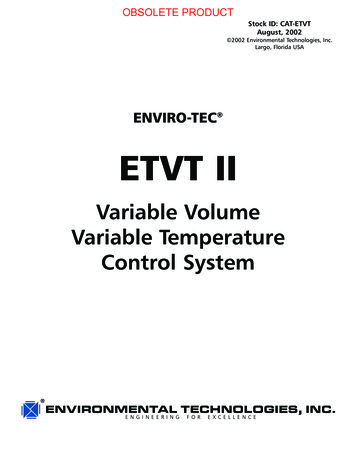
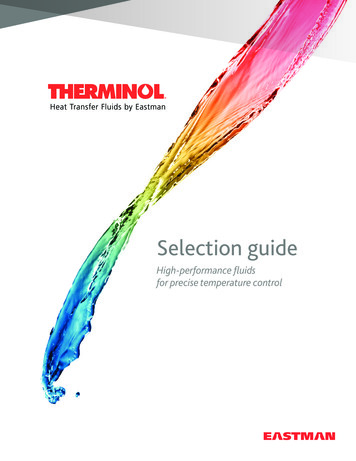
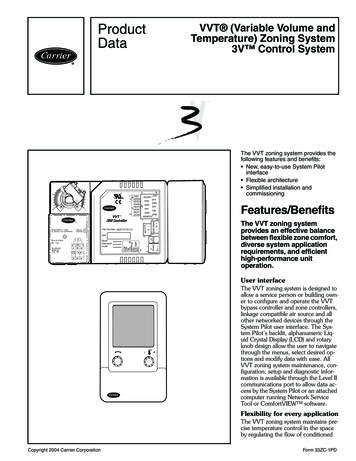
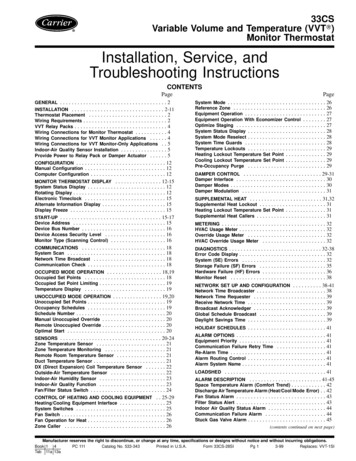
WSEAS TRANSACTIONS on SYSTEMS and CONTROLSubhransu Padheefeature of the controller are analyzed using differenttransient criteria and error parameters.Apart from introductory section, this paperhas four different sections. In section 2, systemconfiguration is introduced and mathematical modelof the system is obtained. In section 3, differentcontrol configurations like (feedback PID, feedbackplus feed-forward control and internal model control)is discussed. Section 4, provides simulation resultsfor different control techniques and the best controllerdesign technique is identified from the transientresponse performance and error criteria. Section 5concludes the paper.2Heat ExchangerConstructionDouble PipeIndirect ContactFlow ArrangementPhase of LiquidSingle PassMulti PassGas-LiquidLiquid-LiquidCoiled TypeFigure 2: Classification of heat exchangercleaning. A shell-and-tube heat exchanger is anextension of the double-pipe configuration. Insteadof a single pipe within a larger pipe, a shell-and-tubeheat exchanger consists of a bundle of pipes or tubesenclosed within a cylindrical shell. In shell and tubeheat exchanger one fluid flows through the tubes, anda second fluid flows within the space between thetubes and the shell.Heat exchanger transfers heat between two fluidswithout mixing them up. The dynamics of heatexchanger depends on many factors like temperaturedifference, heat transfer area, flow rate of fluids,flow patterns. Heat exchanger finds wide spreadapplications in different industries such as petroleum,food, petrochemical, power generation, nuclear, spacecraft etc. The basic principle of heat exchanger isshown in Fig. 1.2.1 System DescriptionThe schematic diagram of temperature control of ashell and tub heat exchanger is shown in Fig. 3. Inputcold water is supplied from the overheat tank to theshell side of the heat exchanger. Steam is supplied tothe tube side of the heat exchanger. A 2-wire RTDis used to measure the output temperature of the heatexchanger and is connected to the transmitter. The2-wire RTD transmitter produces a standard 4-20 mAoutput which is proportional to the temperature. Thetransmitter helps to reduce the noise in measurement.A separate power source is supplied to the transmitterunit. The data from the transmitter is updated in thePC based controller using a data acquisition (DAQ)device. The PC based controller processes the errorsignal and computes the appropriate control signal.The controller unit sends the corresponding controlsignal to current to pressure converter via anotherDAQ device. The current to pressure converterconverts the current output of PC based controller toappropriate pressure signal so that the steam valvecan be actuated in a proper manner. The experimentaldata available for the heat exchanger system issummarized below [12–14].Exchanger response to steam flow gain is50 C/kgsec 1 , time constant is 30 sec, Exchangerresponse to variation of process fluid flow gain1 C/kgsec 1 , Exchanger response to variation ofprocess temperature gain 3 C/ C, capacity of controlSteaminputHeat ExchangerHot wateroutputCondensateFigure 1: Principle of heat exchangerThere are various types of heat exchanger whichare categorized with respect to construction, transferprocess, flow and phase. A brief classification of heatexchanger is shown in Fig. 2.Shell and tube heat exchanger probably is themost common type of heat exchangers applicable forwide range of operating temperature and pressure.It has larger ratio of heat transfer surface tovolume than double-pipe heat exchangers, and itis easy to manufacture in a large variety of sizeand configuration. Shell and tube heat exchangercan operate at high pressures, and its constructionfacilitates disassembly for periodic maintenance andE-ISSN: 2224-2856Direct ContactShell and TubeHeat Exchanger SystemCold waterinputTransfer Process486Volume 9, 2014
WSEAS TRANSACTIONS on SYSTEMS and CONTROLSubhransu PadheePC based ControllerCurrent toPressureConverterCompressorDAQ Card(DAC)4-20 mADAQ Card(ADC)3 - 15 psi4-20 mATemperatureTransmitterPowerSourceSteam InputKg/Sec Steam2 WireRTDCold water inletHot Water OutletShell and tube heat exchangerCondensateFigure 3: Schematic diagram of temperature control of heat exchangervalve 1.6kg/ sec, time constant for control valve is 3sec, time constant for sensor is 10 sec.From the experimental data linearized mathematicalmodel of heat exchanger is developed.in Section 2.1 while developing the transfer functionmodel of heat exchanger system.Transfer function model of heat exchanger system isGp (s) 2.2 Mathematical Model50e 1s30s 1To design a controller, a proper mathematical modelof the process has to be determined. Most of theindustrial system are non-linear in nature and can beapproximated as first order plus time delay (FOPTD)or second order plus time delay (SOPTD) models.The general form of FOPTD model can be expressedasKp e τD sG (s) (1)τs 1Transfer function model of valve isThe general form of SOPTD model can be expressedasKp e τD sG (s) (2)(τ1 s 1) (τ2 s 1)Transfer function model of disturbance isHere Kp is the process gain, τD is the time delay,τ is the time constant of FOPTD system, τ1 andτ2 are the time constant of SOPTD system. Theparameters are obtained from open loop step responsedata or frequency response data. The time delays aremeasured from the step response data.This paper considers the experimental data mentionedThe process transfer function is represented asE-ISSN: 2224-2856Gv (s) 0.133s 1(3)(4)Transfer function model of sensor isH (s) Gd (s) G (s) 0.1610s 1110s 15e 1s90s2 33s 1(5)(6)(7)which is in the form of SOPTD represented in Eq. 2487Volume 9, 2014
WSEAS TRANSACTIONS on SYSTEMS and CONTROL3Subhransu PadheeControl Algorithmsmeasured or estimated. Feed-forward control cantwork alone, so it works alongside feedback control.The transfer function of feed-forward controllercan be represented asTo control the outlet temperature of heat exchangersystem closed loop control is required which canbe achieved by a controller. The control algorithmconsidered to achieve the desired control objective areProportional-Integral-Derivative (PID) control, feedforward controller and internal model controller.3.1Gcf (s) Gd (s)Gp (s)(9)Here Gcf (s) is the transfer function of feedback-feedforward controller, Gp (s) is the process transferfunction and Gd (s) is the disturbance transferfunction.PID ControllerThe block diagram of a closed loop feedback controlsetup of heat exchanger system is shown in Fig. 4. Inthis block diagram classical PID controller is used asthe urbanceuff(s)d(s)r(s) FeedbackControllerFlowDisturbancer(s) u(s)Actuator FeedbackControllerufb(s) ActuatorProcessy(s)ProcessSensorFigure 5: Block diagram of feedback control loopSensorThe block diagram of feedback plus feed-forwardcontroller is illustrated in Fig. 5. The flow disturbanceis measured or estimated and the feed-forwardcompensator compensates the said disturbance. Thecontrol signal of feedback controller and feed-forwardcontroller is summed up and provided to the process.Figure 4: Block diagram of feedback control loopAn ideal interacting PID controller can be representedas()1Gc (s) Kc 1 τd s(8)τi s3.3 Internal Model ControllerKc is proportional gain, τi is integral time and τd isthe derivative timeThere are different tuning methods of PID controller.Some methods are empirical methods (processreaction curve), some methods are based on frequencyresponse analysis of the system and other methodsare based on minimization of performance measures.Despite advances in PID tuning methods the groundreality is that in most of the cases, PID controller istuned using trial and error method.3.2One of the most popular techniques in the field ofchemical engineering in internal model controllerabbreviated as IMC. Internal model controller wasintroduced to limit the effects of error and disturbancewhich is caused by model mismatch. Internal modelcontrol is basically a model based approach [15]. Theprocess model derived can be a forward model orinverse model. The controller is carved out from theinverse model whereas the forward model is placed inparallel with the actual process. The block diagram ofinternal model controller is shown in Fig. 6.Here Gp (s) is the process, G̃p (s) is the processmodel.The process model can be classified in to twodistinct parts such as invertible part G̃p (s) andnon-invertible part G̃p (s).Feed-forward ControllerThe inherent limitations of feedback controller is thatthe controller acts after the disturbance distorts therequired control objective. If frequent disturbancesoccur then feedback control will not be able toattain the desired steady state.To limit suchkind of drawbacks, feed-forward control is used.Feed-forward control limits the deviation caused bythe disturbance but the feed-forward control worksin one condition that is the disturbance should beE-ISSN: 2224-2856G̃p (s) G̃p (s) G̃p (s)(10)The internal model controller can be designed bytaking the inverse of process model along with488Volume 9, 2014y(s)
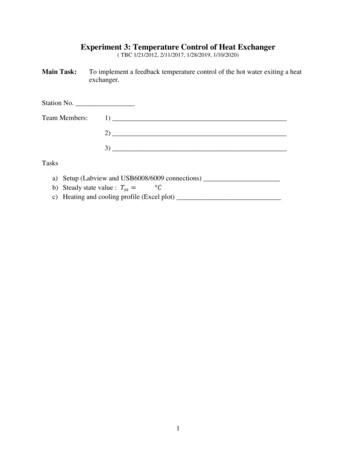
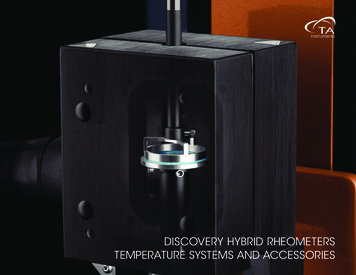
WSEAS TRANSACTIONS on SYSTEMS and CONTROLd(s)r(s) Subhransu PadheeFlowDisturbance1.4 u(s)Internal ModelControllerActuator1.2y(s)Process1Sensor OutputProcessModel0.80.6Figure 6: Block diagram of internal model controller0.4the filter transfer function. The transfer functionrepresentation of internal model controller isQ (s) G̃p (s) f (s)Q (s) G̃p (s)41(λs 1)n0.20(11)(12)0100200300Time (sec)400500600Figure 7: Set point and load disturbance responseusing PID controllerSimulation ResultsTo control the temperature of a shell and tube heatexchanger system different controllers are used andthe simulated studies of the controller performance isdiscussed in this section. Performance assessment ofindustrial controller is o
National Institute of Technology Department of Electronics and Communication Engineering Rourkela INDIA subhransu padhee@yahoo.com Abstract: This paper analyzes the performance of different controllers such as feedback, feedback plus feed-forward and internal model controller to regulate the temperature of outlet fluid of a shell and tube heat exchanger to a certain reference value. The .