Transcription
Comparison of continuous-waveby use of Earth-surfacetargetsand airborne measurementsMauriceA. ycanmeasuredwithbeIntroductionAirbornelidar systemsare being used to determinewindvelocity and to measureaerosolor cloudbackscattervariabilitywith high resolutionoverlarge spatialscales. 2 4 While these measurementsare made,the lidar also often retrievesa distinctbackscattersignalfrom the Earth'ssurface.Unlike atmosphericbackscatter,whichis highly variable both spatiallyand temporally,Earth-surfacebackscatteris relativelymuch less variantand canbe quite predictable.Thereforeroutinebackscatter measurementsby an airborneor space-basedlidar from designatedEarthsurfaceswith knownand fairlyuniformbackscatterpropertiescan potentiallyoffer lidar calibrationopportunities.Thiscalibrationcan in turn be used to obtainaccurateatmosphericaerosoland cloud-backscattermeasurementson largespatialscales.Earth-surfacebackscatteris important,becauseachievinga precise calibrationfactorfor largepulsedlidarsthenneed not rest solely on use of a standardhard targetM.A. JarzembskiCenter,vard,NASAis 977HisV.Education,Hydrolo , lorerBoule-addressisfin" g06.Hisemailis vandana'srivastava@msfc'nasa'g v"1 ived37, No. 30 ," 20 October18 June1998in thefor ,280.3640,1.characterizedCO 2 ivastavaof severala focusedC02 lidar calibrationin laboratorytheotherscomplexdata.witha fairlaboratoryfi)r useshoweddegn'eeof incidenceangletargets.Somecalibrationa slightCalifornianDistributionsm" space-basedas a functionas possibleincreaseterrainof theof inga 1995signalwithNASAshowsunifm'mlidar.IHTI procedure,which can be quite exhaustiveandcostly.Furthermore,calibrationfrom designatedEarthsurfaceswouldprovidean in-flightperformanceevaluationof the lidar for monitoringmisalignmentsor n a calibrationfactorobtainedwith a standardHT beforefield measurements may be comparablewith or even higherthanwhen severaldesignatedEarthsurfaceswith ield measurementsare used.Already,many passive remote-sensing-satelliteinstrumentsare encounteringand analyzingEarthsurfacescatteringat differentwavelengths;e.g., the advancedveryhigh resolutionradiometer(AVHRR)usesoceanand desert-surfacescatteringto calibrateits ngwith lasers that have high-resolutiondata,calibrationof a space-basedlidar 7by use of theEarthsurfaceswill be extremelyuseful.The calibrationmethodologywith the Earth'ssurface initiallyrequiresmeasuringbackscatterof various Earthsurfacessimulatedin the laboratoryandthe use of these backscattermeasurementsas standards for the Earth-surfacesignal from eEarth'ssurface may be retrievedat differentangles ofincidence,this work presentsmeasuredbackscatterat variousanglesof incidenceof differentsimulatedEarth-typesurfacesin the laboratorywith a focusedcontinuouswave tcwt CO, Dopplerlidar at a 9.1- tmwavelength.In general,Earth-surfacereflectance
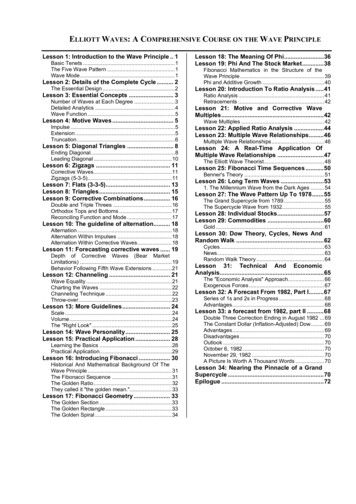
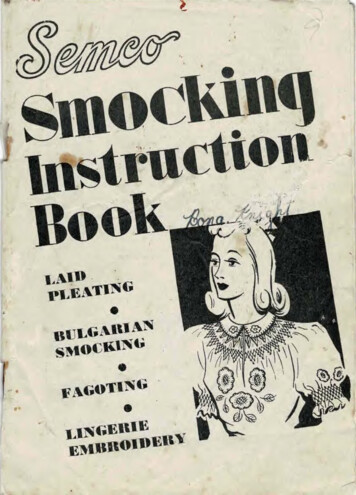
measurementshavebeenmadein the infrared, buttheuseoflidarsto characterizethemandin turn useofthe Earth'ssurfacetocalibratelidarshasnotbeenmade. Thefeasibilityof this calibrationmethodologyis demonstratedthrougha comparisonof theselaboratorymeasurementswith actualEarth-surfacebackscatterretrievedfromthe samelidar ricWind SensortMACAWSImission1 on NASA'sDC8aircraft from 13-26September1995. For selectedEarth-surfacescenariosfromtheairbornelidar data,an averagebackscatterfor the surfacewas establishedandthe statisticsof lidar efficiencywith mparedwith theactuallidar efficiencydeterminedwith the standardcalibratinghard target (CHT).This methodologycanbecarriedout for otherlidarwavelengths.2.Lidar TheoryThe measuredsignal-to-noiseratio (SNR) from a HTsurfacewith backscatterPHT {sr l} (reflectedpowerper steradiantowardthe receiver,dividedby the incident power) with a cw lidar is given by the generalexpression., . 1oSNRHT- qHTKHTTpHT,(1)where qis the overall lidar system efficiencyand K isa proportionalityfactor that dependson severaldirectly measurablelidar parameters.The transmission efficiencyT is given by T exp(-2 L),where (xis the atmosphericattenuationcoefficientat the lidarwavelengthover the path L to the scatteringtarget, iAt close distances(e.g., in the laboratory),T is unity;however,at long distancesit decreasesand needs tobe taken into account.HT can stand for a standardCHT or earth hard target tEHT), since both presentasurfaceof scattering.Equation(1) is used with aCHT,suchas flame-sprayedaluminum(FSA)orsandpaper(SNDt,with knownP(:HT to determineT UllT-Formirrora distanceL fromto the HT surface,KHTwhererange dependencea focusedcw-lidarprimaryKHTis given by 1 ,t2Pr R'ef(Lf(L}}/Bh v,(2)is givenor with Eq. (4) and measurementof SNR(:HT only atthe focal volume.Once CHT is knownthen measured SNRHT from any other HT surfacecan lead toPHT by inversionof eitherEqs. (1)-(3)or Eq. (4).Thus P :,vr for a variety of Earth-surfacecompositionscan be characterizedin thelaboratory.Subsequently,the characterizedEarth surfacescan be usedas calibrationtargetsin flight to obtainEHT for airborne or space-basedlidars.Finally,once EHT hasbeen delermined,then it may be furthercorrectedtoT AER()S(-I,, edaerosols,whichresultsin amore realisticassessmentof the actuallidarefficiency t, be used for atmosphericmeasurements.3.The NASA/MarshallSpace Flight Center's(MSFC's)focusedcw 9.1- mCO. Dopplerlidar was used formeasuringbackscatter.Detailsof the lidar operation and its calibrationprocedurecan be found elsewhere. ' ,'aLaboratorysimulationwas conductedwitha varietyof n,wasmeasuredwith a spectrumanalyzer(SA) as a functionof incidenceaqgle(the anglebetweenthe lidarbeammeetingthe surface and normalto the surface)at thefocal vol:ame.Differenttargetswere investigatedtoprovide an envelopeof a varietyof materialsthat maybe found in Earth surfaces,homogeneous(e.g., sand,soil, snox, water, and single-typevegetation)as wellas heter)geneous(e.g., vegetationinterspersedwithopen lard and citiesl.Duringthe 1995 NASA/MACAWS r fissionwhile atmosphericaerosol backscatter was being detected,SNREH T was also measuredduring.ircraft rolls at differentrangesfor variousEarth surfaceswith diverse compositionsfrom nearlyhomogenoustoquiteheterogeneousmixtures.These measurementsof SNR :HT were correctedforatmosphericattenuationand comparedwith theoretical SNFEH T by use of the PENT from simulatedEarthsurfacesmeasuredin the laboratory.Fromthiscompari;on, the statisticsof EHT for selectedEarthsurfaceshaving an averagePENT was determinedandcomparedwith the measuredlidar efficiencyby use ofthe SND CHT.byA.f(L) 1/IL [1 (wR /kL)"(1L/F)2]},(3)where hv is the laser photon energy,P is the transmittedlaser power, R is the lidar-beam(l/e) intensity radiusat the telescopeprimarymirror,F is thedistanceto the center of the focal volume, and B is thedata-systembandwidth.At thelidar-beamfocalvolume L F, Eqs. (1)-(3) reducetoSNRm,Laboratory Experiment and Airborne Mission "qHTPT R2TpHT/BhvF.(4)By use of a CHT with knownPENT, as other lidarparametersare measurable,CH'r can be determined, l This can be done eitherwith Eqs. (1)-(3)and measurementof SNRcH T at variousdistancesLBack: catterfrom SimulatedEarth SurfacesFigure- showsan f simulatedEarth-type(a) land surfacesand (b) wet surfaces.Numerousmaterialswere used to simulateland-surfaceHT's:oak, pin ',corn, sand, soil, and roof tar.The materialwa glued,withrubbercement,onto s,vegetationwas cut into smallpieceswithsizes of roughlyseveralmillimeters.The HT wasattachedto a rotatingmotor shaft to give a Dopplerfrequen(y-shiftedsignal.It could be moved along anopticalrail to give rangeresponseof SNR(L),or itcould be placed at the center of the tidar-beamfocalvolume-'or rangeL - F [Fig. l(a)].Herewas20October1998Vol.37,No.30/ APPLIEDOPTICS7121
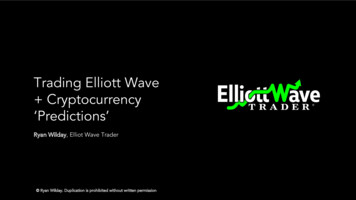
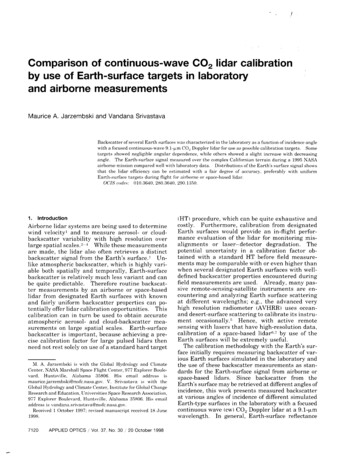
(a)simulationotI ld urthccs\ .lo)lIIIIiI(a)hdar1 0 "I(b) simulalionelwet;url lceslidarl-pul10(C)"2airborne lidar Iield rn .a urcmcnluIlJ,, dmeasurement(blretrievalwetofancw-lidarAir-10 .4,I10.3rIbeamduringanchangedby the turningof the HT with respectto thelidar-beamaxis.Simulationsof wet surfaceswere performedin adifferentexperimentalsetup [Fig. l(b)].A rotatingvessel containingthe wet material,placed on a motorshaft, produceda smoothparabolicsurface,owing tocentrifugalforce.The equationof the curve in twodimensionswasgeometricallydeterminedto bez - 0.13r 2 at a constantangularspeed.With thelidar beam directedat differentspots on the parabolicwatersurface,differentcould be accuratelydeterminedby use of the vectorcalculusequation cos 1IN. I/[NllII),where I is the incidentlidar-beamvector and N is the surface normal vector, which d snow simulatingthe Earth'sice-capped-snowregionsand soapy water simulatinga choppy-oceanwatersurfacewith whitecaps, were also investigated.With Eqs. (1}-{3t, (:HT was determinedfrom themeasuredSNRcHTIL)of two CHT's, (SND and FSA},and their PCHT at q: 45 is given by 7.33 10 : sr 1and 8.28 10 2 sr 1, respectively,with 4% uncertainty. H.Other lidar parametervalues were hv 2.1818 10 2Oj, p2.9W lC ,,R0.0305m 1.5c ,, F 9.33 m 0.5 , and BSA 360 kHz 1%.The uncertaintyin measuringSNR in the laboratorywith SA was 7 2.The CHT's gave SNn 0.17 -- 9c2 and q 'SA 0.16 9%.An average value of,qcnT0.165 13 was used as the lidar systemefficiency for determiningthe backscatterof various simulated EHT surfaces.For the various land and wet Earth-surfacesimulations,SNREH T was measuredas a functionof atL F.Then, from Eq. (4), PEHT was determinedwith the previouslymentionedlidar parametervalues.Figure2 shows PEHT as a functionof for (a)land-typetargetsand (b) wet-typetargets.Uncertainty in PEnT for land-typetargetsis 12c ,, while forOPTICSVol.37,No.30,' 20I,[],,' 'I,II,{,,I{-, .,t,,' 'I,I,I'IiEarth-surfaceroll.APPLIEDF Ik CHTSoll-'RoeltarSND CHT- Oak Pine1- Corn lira! ut[ - Corn leerI 8ND*JPL dItlofsurfaces.October1998II(b)10 .4-10-7122 Surfacefortc}- . . 1 o "3III. .'- 10"I:wiI srlcwWiller wttll bubblesWilierWillilr-I-- ,1. 0 thEarth,IIiIi3040506070Angle o1 Incidence, nd-type80a90functioncwtargetsofDopplerandthe wet-typetargets,the uncertaintyis higher.Ingeneral,for all the simulatedEHT land-typesurfaces, dependenceof PEHT on is small.Some of thesurfaces,such as FSA, pine needles,and uncutcornleaves,showan increasein PEHT for smallerq ;whereasothers,such as SND, beach sand, soil, rooftar, oak, and cut corn leaves,show almostno dependence.These resultsshow that there are severalnaturallyoccurringtargetsthatbehavelike thestandardFSA and SND CHT's and can r theland-typesimulatedEHT surfaces,sand and soil targets give the highestPENT, while vegetationtargetsgive the lowest.Additionally,the vegetationtargetsthat were dried out had negligiblechangeon PENT.However,wettingall targetswith waterloweredthePEHT dramaticallyfor all .This follows the surementof dry and wet terrestrialsurfacesinthe near infrared,s thus showing that wet targetshadlower reflectance.However,backscattermeasurements of wetted targetscould not be accuratelyquantiffedas a functionof watercontentfor thisexperiment,becausethe amountof waterchangedrapidlyin time, owing to the HT angularrotation.For the wet surfaces[Fig. 2(b)], smoothwater had
the lowestPEHT of all HT's.This supportsthe previous observationthat the presenceof water (PETIT10 s sr t) on wettedland-typetargetsloweredPEHTas comparedwith dried targets(-10a-10i sr't).The presenceof small rippleson the smoothwatersurface tendedto increasethe PEHT of water.As theripplesbecamelarger,PEHT also increased.Furthermore,the additionof soap bubblesto the smoothwatersurfacegreatlyenhancedwaterOEHT by morethan3 ordersof magnitude.High backscatterwasalso measuredfor snow.Despitethe drasticdissimilaritybetweensnow and soap bubbleson the watersurface,PEHT for both were nearlythe same.Eventhoughrefractiveindices of water and ice are similarat the 9.1- mwavelength,backscatterappearsto beaffectedsolely by the surface-shapeirregularitiesofsnow, which shows a dramaticdifferencebetweenlowsignals from smooth water surfacesand high signalsfrom irregularsurfaces.Also, the additionof soil toeithersoap bubblesor snow tendedto furtherincreasePElrr, which again agrees with the finding thatthe P :HT of soils -10] sr t) was found to be higherthanthatof snowor of waterwith soap bubbles(10 s-104st1).The investigatedtargetsgave a range of possiblevariationin the PEHT that may be encounteredduringfield missionsfrom real Earthsurfacescomposedofdifferentmaterials.Figure 2 shows that for the simulatedland-typeEarthsurfaces,backscatterat 9.1m varies by a factor of -50, dependingon whetherthe simulatedEarth surface is purely vegetationtypeor purely nonvegetationtype, or a mixtureof the two.For mixed surfaces,if the fractionsof differentmaterials can be estimated,then an averageDEHT can beestimatedby weightedmixingof theirindividualpEwr'S.With the use of passivesatelliteimagery,such as LANDSAT,it may be possibleto fractionatedifferenttypes of surfacesencounteredin the lidarsampledsurfacearea.For calibrationpurposes,homogeneoussurfaceswould be best; but if these werenot available,thanan averagePEHT of a compositesurfacecould be used.The measurementsshown in Fig. 2 were made atthe e from actual Earthsurfaceswith anairborne-focusedcw lidar are performedat randomrange values,dependingon the aircraftaltitudeandroll.Thereforemeasurementsof the range responseof backscatterfrom the simulatedEarthsurfaceswere performedmeasurementsin the laboratoryfollowed the sameto show that thebehavioras the the-ory predicted[Eqs. tl)-I3)]and hence to supportthepossibilitythatthe EHT may be determinedfromSNREHT at any rangefor thesetargets.Figure3showsthe rangeresponseof HT made from beachsand and pine, as well as the SND CHT.The beachsand and pine HT's show good agreementwith lidartheory,which is similarto the case of SND CHT. 2The range responseof backscatterfor the other landtype HT's (not shownin Fig. 3} also were in goodagreementwith the lidar theory.These resultssuggest that the signal from thesetypes of Earthsur-10 e i r r, i i irT,,[,r,IEHT Dais, P.3.2W, F.9.53m CHT Dam, P.2.gW.F 9.33m-Theory, F ls.(%2), i,,m.-o.'16s 'rv'/- i ,,J ,]I ' II 0a1o, ,i;,,Beach sands.oc.,10 610 5,k , i , , , t t , , I , J I , , I ineHT'sEarti'-SurfaceSNRandfaces at rangesotherconjunc ionwith Eqs.ciency.B.9.510.0Range Llm)the10.5as a function(SNDIof rangecalibratingthan L F can(1)-{3) to estimate11.0L fro-HT.beused inlidar effi-ReturnFigure(c) shows a schematicof how the NASA/MSFC airbornecw-focused9.1- mlidar retrievedanEarth-surfacebackscatterat the unfocusedpart ofthe lidar beam along with atmosphericaerosol backscattert the lidar-beamfocus duringan aircraftrollfor the MACAWSmission.The lidar beam was focused a 54 m througha modifiedaircraftrightside-viewinggermaniumwindowin frontof theaircraftwing.Usually,it is not solsand theEarth'ssurface.As the aircraftentereda roll, asmall Earth-surfacesignal emergedat a distanceL.As the toll angle increased, decreased,which decreasedL; the mean signalstrengthincreased,according;o Eqs. (1)-(3), and the signal could be easilyfollowedfor the durationof the roll.Usuallythissignal htd a Doppler-frequencyshift lesser or greaterthan th;tt of the aerosolsignal,and thereforea separateSNR for each signal could be retrieved.Onoccasionthe two signalsoverlapped,and a separateSNR fm both aerosoland the Earth'ssurfacecouldnot be (btained.Generally,the Earth-surfacesignal tencedto have a narrowerspreadin frequencythanth aerosolsignal,whichhas an additionalspread,)wing to turbulence.Figur, 4 shows both the aerosolsignaland theEarth-s;trface signal from the focused cw lidar duringan airclaftroll, as displayedon the digitalsignalprocess(rin real time for 1 s of integration.TheEarth-sltrfacesignalwas from the expandedlidarbeam at d was from agriculturalland locatedin theSacramq ntoValley near Willows,California.With20 Octolber1998/ Vol. 37, No. 30 / APPLIEDOPTICS7123
SACRAMENTOVALLEYWillowaN SacramentoaklandFranclsco\., O Sa0 .0I0n eteyJ* Salinas*" 'I.FresnoFig. 4. 1-s integrated cw-lidar spectral data taken with the digitalsignal processor of' both an aerosol and an Earth-surface landbackscatter signal at different Doppler-shift frequencies dunng anaircraft roll over Sacramento Valley near Willows. California. locared at approximately 39 25' N. lat, 122 15' W. long.Lostpropagationofa Gaussianlidar beam, the lidar-beamcross-sectionalarea near the surfacewas -6.4m2with a projectedarea of -11.6m 2 along the surface.For the DC8 aircraftspeed of -123m s 1, this correspondsto Earth-surfacesamplingof approximately123-m long 5.2 m wide, or approximately0.15acressIn contrast,aerosolbackscatterwaswithinthe lidarfocal volumewith a beamcrosssectionalarea of 8 10 5 m 2 and an integratedsamplevolumeof approximately65 m 3. Despitedrasticdissimilaritiesin beam sizes and intensitiesat the focal volume for aerosolsand at the expandedbeam at the Earth'ssurface,strengthin signal fromaerosolsand from the Earth'ssurface can be comparable.This is due to the relativelyweakaerosolbackscatterat the high-intensitypart of the lidarbeam and the relativelystrongEarth-surfacebackscatterat the low-intensitypart of the lidar beam forL F (as shown in Fig. 6 of Ref. 12).The outgoinglidar beam to the Earth'ssurface andthe backscatterfrom the surface can vedSNR from the Earth'ssurfaceneeds to be compensatedfor attenuation.The significantfactorsaregiven in terms of the attenuationcoefficient(x of major atmosphericcomponents:aerosol(c 0.024km 11, carbondioxideICO,2 line, 0.0014 km t),and water(H20 line, 0.0064km 1 and H. Ocontinuum, 0.05 km i). The averagevalues forCO.) and H, O absorptionlines were derived from lineby-line computations1 while the H, O continuumwasderivedfrom LOWTRaN 7 with representativemeteorological conditionsfor the Californiaarea. 7 The average aerosol value was derivedfrom the integratedaerosolbackscatterwith measuredverticalprofilesobtainedfrom ascentsand descentsduringthe MA7124APPLIED OPTICS Vol. 37, No. 3020 October 1998Hills*Fig. 5. Map of re ,donof Calitbrnia showing the locations wheredifferent Earth-surface measurements were made as illustrated bydifferent symbols.CAWS mission.The total transmissionefficiencyT,which typicallyrangedfrom 55c : to 75 ,was estimated for each datumwith the aircraftradar altitudeand roll angle.The geographicallocationof the variousregionswhere a backscattersignal from the Earth'ssurfacewas obtainedduring an aircraftroll are shown Fig. 5.Differentsurfacesencounteredwere vegetationandnonvegetationagriculturalareasover California'sSan Joaquin(open invertedtriangle,plus, and antiand Sacramento(open square)Valleys;forest mixedwith sparse open land over the Sierra NevadaMountains west of Reno, Nevada(filled triangle,open diamond,and open triangle),and over the CoastalRange Mountainsin Californianear Monterey(filledcircle), SantaCruz (filled square),Salinas(filled invertedtriangle),and SantaRosa (cross);and grassland east of San FranciscoBay (filled diamond)andmetropolitanareas in the SouthBay area (open circle).Althoughthe DC8 made many rolls over theopen ocean,no signalfrom a relativelycalm oceansurface(even at L 500 m) could be detectedwiththe given outputpower of the lidar.This was probably due to the water'slow backscatter(Fig. 2t.Figure6 showsmeasuredSNR normalizedby T{SNREHT SNR/T)at edby thesymbolsshownin Fig. 5.Each data point representsaveraging over severall-s samples,rangingfrom 7 to 53samples.The horizontalline througheachdatapoint gives the L variabilitythat is due to both rollangle and radaraltitude,whereasthe verticalline
10 3I11O"--[IEH T 008(sand)P HT 1003[IEH T 0,002(sod)(vegetallon}10 z\101t10 e,o,,.;1.00200030004,000DistanceFig. 6.Measuredefficiencyl)ackscatteredT for the various9.1-tamcw( 11-(3t]by' usesentativelidarahmgof lidat"by therangeof SNR,.:,rrdepictedparametersbythegives the rangeand roll angle.lineatthroughwithin thevariouseachhorizontallineis duedatathroughto variability000'oin Fig.lidar0text5 witheachpoint,while[Eqs.for fourrepre-datain th-surfaceatdistance,oby transmissionshownbackscattera givenof L thatnormalizedcitedof70L (m)surfacesvaluesvertical0CO0Surface,comparisonof rVarial)ilitytopoint,radaris degivesintheL iswhichaltitudegives SNR :wr variabilityover the sampledsurface.For some samples,SNREm.was relativelyconstant,e.g., grasshillsinterspersedwith some treesandshrubsifilled diamond)and also for metropolitanareas (open circle) which, even thoughinhomogeneous,form a uniformmixturewithoutsignificantbackscatter changesbetweenconsecutivesamples.Whereasfor other regions,such as over the valley and coastalranges,there is more variabilityof SNREHT, causedby significantheterogeneityencounteredas a resultof low-backscattervegetationinterspersedwith highbackscatternonvegetationareas.Figure6 alsoshows curves of predictedSNREw r as a functionof Lwith Eqs. (11-(3) for four Earth-surfacetypes simulated in the laboratowwith PEHT 0.08, 0.03, 0.002,and 10 sr IFig. 2) correspondingto sand, hese curveswere derivedwith the variouslidar parametervalues duringthe missionas hv 2.1818 10 2,) j, p 4.4 W 3q4, R 0.0265 m 35 , F54.0 m 25 , and B[)sp 141 kHz 15} duringtheMACAWSmission.The measurementerror in theSNR on the airplaneduringcalibrationwith the SNDCHT was 8 .The uncertaintiesgiven here for themissionand those given earlierfor the lab measurements representinstrument-relatederrors.The average lidar efficiencyas measuredat the beam for this two-weekmissionperiod with the SND CHTwas rl(,H'r -- 0.126 18c/(.Most of the data were boundedbetweensoil andvegetationandfollowSNRI,:u, r with increasingthetrendofL, as predicteddecreasingby theory.For th metropolitanareas (open circle), which wouldbe con posed mostly of high-backscattertargetssuchas cm crete-typematerials,roof tar, metals,soilsmixedwith low-backscattertargetssuch as vegetation, tEaT was boundedby the curvesof soil andvegetation.The grass hills interspersedwith treesand s]" rubs (filled diamond)east of the Bay area gavelow SNREHT, close to that predictedfor vegetation.In this case the long grass offers a good groundcoverover soil, so backscatterfrom soil was not expected.Forestedareasinterspersedwith open land in theSierraNevadaMountains(filled triangle,open diamond,and open triangle)and the CoastalRangeMount ains (cross, filled square,filled circle, and filledinvertedtriangle)gave an SNR :HT betweensoil andvegetationvalues;howevernear Salinas(filled invertedtriangle),moresparsevegetationon theeaster;1slopesshowedthe highestSNREm.Furthermore,SNREuTfl'om SacramentoIopen squaretand San Joaquin(open invertedtriangle,plus, andant) Valleyseach showedthat the targetswere heterogeneous,mixedwith vegetationand nonvegetation types.The sand, soil, and vegetationtargets,even thoughthey were madefrom Alabamasources,provideagood eqvelopeof possibleSNREH T from surfacesthatmay containsimilarmaterials.To get a pledduringthe flight with ncounteredin the missionwould be neededto determinetheir th.:Jrr in the laborator:,.The measuredSNREH- r from a 9.1-txm ]idarfor difl erent Earth surfacesencounteredhere rangedwithin a factor of 50, as is also seen from lab measurem,mtsin Fig. 2.Some comparisoncan be made with the Earthsurfacesignalobtainedduringthe follow-on1996MACAWS mission by the calibrated10.6-gmpulsedlidar.Lab characterizationof Pc]n, from 9.1- to10.6- n wavelengthsshows similarvalues. 4TheDEHT, t 10.6 p.m, retrievedover San JoaquinValleyrangecfrom 0.003to 0.031 sr ', encompassingthehighly' variablegeographicalfeaturesfor the valleyand agreeingwell with the 9.1-gmdata (Fig. 6, plusand open invertedtriangle)boundedby the curves of0.002 sr the:aT 0.03 st" . Anotherexample ofth :HT a. 10.6 p.m over the Coastal Range MountainsinCalifornianorth of San Franciscorangedfrom 0.0144to 0.0,'78sr 1This examplecompareswell withthe 9. %tm data {crossl which wouldcorrespondtothe av. rage PFHT 0.012 sr curve.In addition,the PE, 'r at 10.6 Ixm over relativelycalm ocean waterwas at,proximatelymeasuredto be11.8 0.2) x10 v s" Backscatterfrom watersurfaceis moredifficultto quantify,owing to the effect of surfacedisturt.ancesand, in addition,its wavelengthdependence is not well known.Even so, the 10.6-pom valueover o1:en ocean surface is closer to the value of 10sr 1 fcr 9.1 #m for a smoothwatersurfhceratherthan t,, the 10 4 sr i value of the perturbedwatersurfacwith bubbles.These examplesshow thatEarth-mrfacesignalscan be monitoredconsistently20 Oct)ber1998/ Vol. 37, No. 30APPLIEDOPTICS7125
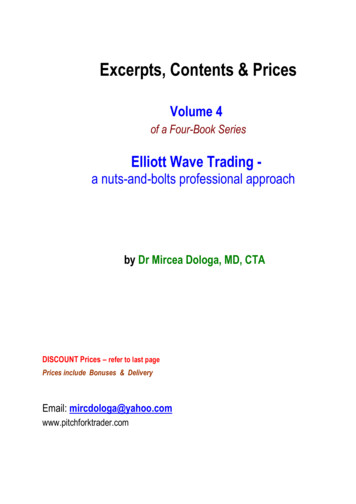
40II'IIi4035 (a) I'I(f)l35IPsvn Isr"1 -0.007ffswr 0.15 0.12303o252020Z Z1510O!,' ' ' ': OLo 1,(c) uO 11160OL.,.(d0*,JI,I15 (e) V':F20 F'8.0Fig.7.Histogramsas shownValleyinnearareaonlyof andh.;H'rfi'omri'omFig.withTh.:H, r 5thetransmissionnortheast(ct(e)the6 is shownfrom differentlidarsand,calibratethe lidar in flightthe PEHT'4.i 'normalizedRangeCalifornia950'9.0LOG ( NR/Tof spectivetheof Santaof thelegend.TheSNDtherefore,may be usedwith a priori knowledgetoofLidar Calibration from the Earth's SurfaceAPPLIEDOPTICSVol.37,No.3020arel niain thesquare);Mountainsof Salinas,0.12fl'om(solidthistrianglel; er(d SaninvertedI)F,:mis verticalsurfaces.The Earthsurfacessampledin flight were, for themost part, heterogeneous,and the SNREHT variedafair amount.Figure7(at-7(e;histogramsfor fivesets of data over differentregions show the frequencyof occurrenceof measuredSNR normalizedby T andfILLThesehistogramsgive thedistributionofrange-independentSNRI :H T, which shows the variation, encounteredduringa roll, that is due to surfaceinhomogeneityonly.Figure7ta)-7(e)shows the positionof the modeof distributionchangingfromlower- to higher-backscattertargetswith the tightestdistributiongiven for the metropolitanarea in theSouth Bay area in Fig. 7(d), which suggeststhat itwas the most uniform target with the least variabilityfrom each 1-s sample.7126eastsurlhcesT ncyCruz,October1998Homogeneousor even uniformheterogeneoustargets [e.g., Fig. 7(dt] wouldbe preferredfor in-flightcalibration,as they would give well-definedSNREwr,leadingto well-definedlidarefficiency.However,since the tlyheterogeneouswithvaryingSNREH T, any estimationof lidar efficiencyqEHT [withEqs. (1)-(3)] from these data sets would also be associated with some variability.From the statisticsofrange-independentSNREH T shownin Fig. 7(a)-7(e),the statisticsof'qEU, r were determinedwith an averagePEnT correspondingto each of the five regions.Thesevalues for PEaT of 0.007, 0.009, 0.012, 0.015, and 0.021sr were estimatedfor the curvesthat best fit theselected data samplesshown in Fig. 6. The distributions of EHT are shown in Fig. 7(f)-7(j) with the meanEH'r and its standarddeviationfor each distributiongiven in the legend.Figure7(i), correspondingto themost uniformlydistributedtarget,even though heterogeneouswith the tightestdistribution,gave mean
TIEm,-- byplexonlywitha tionsandknownforsuchbemuch1. J. R avemeanTIEHTHov'ell,thentheTheseEarth-surfaceis knownwiththena fair"thedegreelidar
3. Laboratory Experiment and Airborne Mission The NASA/Marshall Space Flight Center's (MSFC's) focused cw 9.1-_m CO._ Doppler lidar was used for measuring backscatter. Details of the lidar opera-tion and its calibration procedure can be found else-where. '_,'a Laboratory simulation was conducted with a variety of homogeneous HT's made from