Transcription
(NASA-TM-109242)NASA' MINGEXPLORERSPACECRAFT7N94-10667FIRSTATHEX RAY(NASA)UnclaspG31350183105
,lp'NASA-TN-1092421953-09NASA'sfirst in-spaceoptical gyroscopeexperimenton the X-ray Timing ExplorerA technologyGlennNASAGoddardUnger,SpaceDavidFlightM. Kaufman,Center,GlennHoneywell,MichaelMC 715.2,spacecraftK.rainakGreenbelt,Maryland20771X4 ASandersMC 2J27A1,Phoenix,Arizona//v'- z- 7Pt85036/Bill TaylorHoneywell,MC 34624R. SchulzeQE, WashingtonD.C.,20546ABSTRACTWe describea technologyexperimenton the X-rayTimingExplorerspacecraftto determinethefeasibilityof InterferometricFiber Optic Gyroscopesfor space flight navigation.The experimentconsistsof placinga mediumgrade fiber optic gyroscopein parallelwith the spacecraft'sinertialreferenceunit.The performanceof the fiber optic gyroscopewill be monitoredand comparedto utthe two-yearmissionlife.1. OGs)are rotationsensorsusedfor commercialaircraftand cruise missile navigation,l, 2 IFOGs are a small, solid state, light weight, low voltage,and lowpoweralternativeto mechanicalgyros.Theseattributesmakethe IFOG idealfor space flightnavigationuse. IFOGs have the potentialfor 15 year reliability.In addition,the IFOG measurementsensitivitycan be scaled by adjustingthe fiber loop diameterand/or the numberof turns.As a result,IFOGs are capable of measuringincrementalangles and rotation rates to a high level of nd Honeywellare teamingto fly an IFOGexperimenton a NASA spacecraft.The X-ray Timing Explorer 3 (XTE) has been identifiedterm target of opportunityfor the IFOG experiment.A closed-loopIFOG IRU (InertialUnit) will be placed on the XTE spacecraftas a separate, but distinct experiment-as the nearReferenceThe goal is to transferthe [FOG technologyfrom aircraftand missileapplicationsto routineNASAspace flight use.This offers great benefits.NASAobtainsa more cost efficient,reliable': technologyfor space flight navigationwith a number of proven suppliersand the navigationinstrumentmarket is enhancedand expandedfor military and commercialsuppliers.The main objectiveof the XTE IFOG experimentis to provethe long term feasibilityandreliabilityof the IFOG technologyfor space navigation.Other objectivesare to: (1) establisha mediumperformancespace qualifiedIFOG IRU specificationfor the NASA/GSFCSmall Explorer(SMEX),Earthprobe,and Explorerclassspacecraftsuch as XTE, TropicalRainfallMeasuringMission(TRMM),Far UltravioletSpectroscopicExplorer(FUSE,)etc., (2) provideflight heritagefor a vendor-\\
Jt
- .-::'"-'1953:09" .supportedopticalguidanceand controlcomponentfor future spacecraft,(3) increasereliabilityNASA spacecraftto supportseveralmediumand small class sciencemissions,and (4) developcost, reliable on-shoremarket suppliersto support NASA missions.Wewilldiscussin ace;and [FOG descriptionand performance.2. flowpointingIFOG-to-XTEA Delta II will be launchedfrom KennedySpace Center (KSC) and carry the XTE into a 500 kmto 600 km orbit with a 23 degree inclination.The XTE will be launchedno later than April 1996 with alaunch goal of August1995.The missionlife is anticipatedto be greater than two years.XTE willweigh less than 7200 pound and use less than 800 Watts.XTE's three primaryinstrumentsare the AllSky Monitor(ASM), ProportionalCounterArray (PCA), and High Energy X-ray Timing Experiment(HEXTE.)The ASM is being developedat MassachusettsInstituteof Technology,the PCA atNASA/GSFC,and the HEXTEat Universityof California.XTE's scienceobjectiveis to monitorandstudy 2 keV to 200 keV energy regionsin the sky. The spacecraftmust provide0. I degree pointingtoany celestialsource, 0.036 degree pointingknowledge,and less than 0.0083 degree jitter (3 sigma.)3. [FOGIRU EXPERIMENTThe proposedexperimentwill comparethe performanceof the [FOG with that of the XTE'sprimarygyroscope,a mechanicalgyroscope,for at least 2 years.By comparingthe primarygyro'sdeterminedattitudewith the IFOG'sdeterminedattitude,the IFOG'slong-termreliabilitycan bemeasured.The XTE On-BoardComputer(OBC) and GSFC e from the XTE primaryIRU data. However,only the GSFCwill be used for spacecraftattitude determinationusing the IFOG IRU data.4. ementalangle data from the [FOG IRU and primarymechanicalgyro based IRUwill be read by the XTE on-boardcomputerat a 4 Hz rate. [FOG voltages,temperatures,and statuswill be read at a 0.5 Hz rate.The [FOG IRU will be read immediatelybefore the primarygyro.Thedata flow for the two gyros will be different.In particular,the position or incrementalangle data flowfor both gyros is describedin the followingparagraphs.The IFOG IRU data packetwill be dumpedto the SpacecraftCommandand Data HandlingSoftwarefor formatting.The packetformatadheresto the standardsset forth by the ConsultativeCommitteefor Space Data Systems(CCSDS.)After the [FOG IRU data is formattedit will betelemeteredto the GSFC Flight OperationTeam (FOT.)The FOT is responsiblefor retrievingall XTEtelemetry,performingtrendinganalysis (i.e. voltage vs. time), transferringdata to the Flight DynamicsFacility(FDF), and data storage.The FDF is responsiblefor On-boardComputer(OBC)AttitudeDeterminationand Validation(AD&V.)Duringeach XTE OBC AD&V,the FDF will measureresidualstatistics- a process that defines vectors and calculatesvector differencesfor the primarygyroand [FOG relativeto the star sensor.Also, the FDF will corn.pare the IFOG determinedattitudewithprimarygyro determinedattitude.The FDF attitude determinataonXTE Attitude Control System (ACS) OBC. Using the star trackerdeterminesan error and propagatesa new spacecraftattitude.process is similar to that used by theand gyroscopeinput, a Kalmanfilter - ,-"
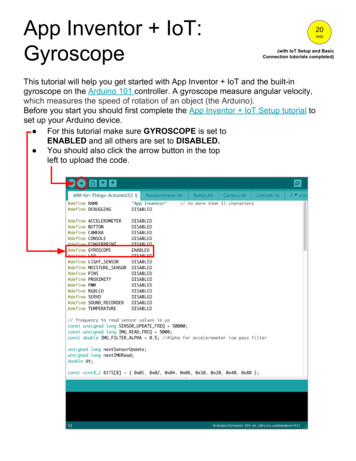
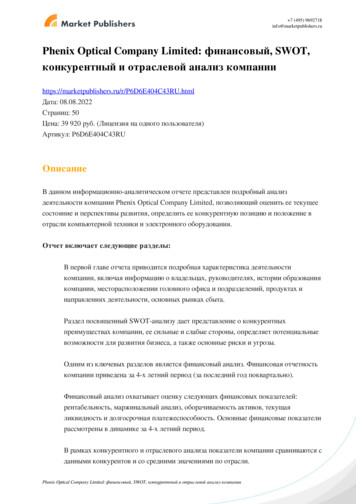
1953-09 : ,'f;:-::" S -IEETUnlikethe IFOG'sdata processing,the XTE AttitudeControl SystemOn-BoardComputerwilluse the primarygyro data to determinethe spacecraft'sattitude.The XTE's star sensor data and theprimarygyro's incrementalangle data will be input to a Kalman filter.The filter is implementedwiththe XTE OBC.The OBC will determinethe delta quaternionfromwhichthe new attitudeispropagated.The attitude,star sensor data, and incrementalangle are among the many types of data thatare telemeteredto earth,5. IFOGINTERFACEThe IFOG IRU will be located on the top inside panel on the spacecraftside (see figure1 and 2.)The ]:FOG is less than 10 pounds and is 7" wide, 7" high, and 10" deep.The thermalenvironmentisbetween-10 C and 40 C.No thermalheatersare necessary.The XTE has three MIL-STD1773buses:the spacecraft,instrument,and ACS.The IFOG will interfaceto the ACS'sbus. The NonessentialPower Bus will supply 28 V DC to the ]:FOG IRU. The IFOG IRU will also have access to a 28 V pulse that can turn-onand turn-offits internalswitch.The relay allowsthe supply voltagetoreach the IFOG IRU electronics.The IFOG IRU worst case power consumptionis 30 Watts.IIFOGv,n'll belocztedinsideZon theof thepanelFIGURE1 - XTE DeployedViewtop
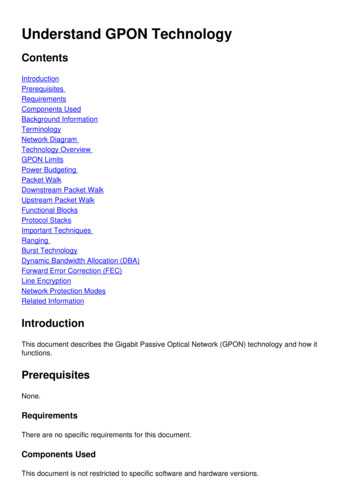
j1953--09YFIGURE6. FIBERblockThe XTEassembly. Bias stability :. OPTIC2 - XTE lliteIFOG IRU experimentuses three IFOGsmountedEach of the IFOGs meets the followingrequirements:0.01deg/hr(Is)Scale factor uncertainty-- 50 ppm,Angular random walk 0.005 deg/'qhrFrequencyresponse 500 HzInput axis alignmentuncertainty--I00 gradReadoutresolution0.167 arc-sec/LSBMaximumangular rate 140 deg/secSizeDiameter3.6 inorthogonallym(ls)Height 1. I inWeight-300 gm.Full performanceoperationaltemperaturerange: -20 to 50 deg CMaximumtemperaturerate of change - 5 deg C/hourona sensor
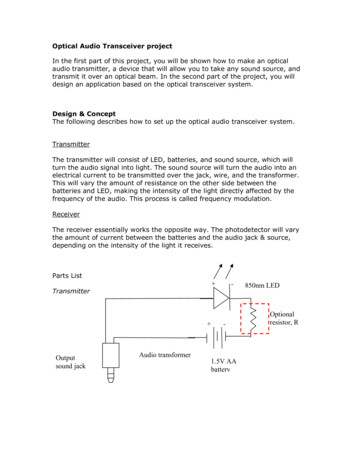
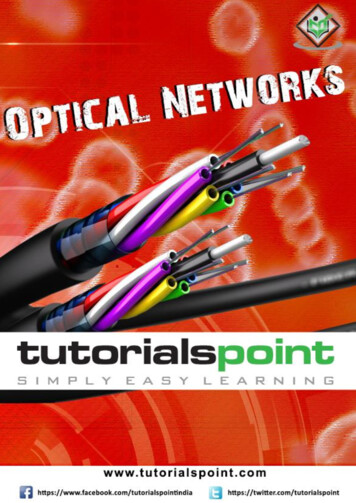
1953-09As shown in figure3, the IFOG consistsof a solid state light source,a fiber-opticdirectionalcoupler, a Lithium Niobate(LiNbO3)integratedoptic multi-functionchip (MFC), the fiber sensing coil,a photodetectorand signal processingelectronics.The sensing coil is roughlyone kilometerin length,wound on a mandrelwhich is nominallythree inches in diameter.The MFC consists of a polarizer,twophase modulators,and a "Y-junction"for splittingthc source light into two waves of equal intensity.The two waves, after traversingthe coil in the clockwise(cw) and counter clockwise(ccw) directions,are then recombinedat the "Y-junction"and then directed to the photodetectorvia a fused fiber-opticdirectionalcoupler.In the absenceof rotation,the cw and ccw waves see identicalpath lengths insidethe sensing coil, and at the photodetector.In thepresenceof rotation,the two waves experiencea path length differenceproportionalto the rotation rate.To measurethe small phase shifts due to rotation,a standardAC bias modulationtechniqueisused.The opticalphase differencebetweenwavesis modulated,and the photodetectoroutputissynchronouslydetected.In closed loop operation,the demodulatedsignal serves as an error signal fordriving the sensor back to its null condition.This is achievedby applyinga phase ramp feedbacksignal to one of the phase modulatorson the MFC, which in turn, introducesa phase differenceinto theloop equal and oppositeto that caused by rotation.The feedbacksignal then providesa digital pulsetrain of frequencyproportionaltO rotation rate and an integratedoutput proportionalto the accumulatedangleof rotation(0.167SourceI Lightarc second/pulse).FC"TBias ModulationinFeedback Modulation inPhotodetector/PreamplifierAssemblyvFIGURE7. IFOGThe majorIRU system; Inertial Sensor Assembly- Fiber Optic Gyros (three) MIB and wiring harness IFOG Support Electronics Built-In Test (]3IT)/Controlsubassemblies,3 - IFOGConceptIRU ELECTRONICSshownin the blockdiagramlISA)assemblyElectronicsSignal outputassembly.-.-,of figure4, are:
.3".-,1953-09 ProcessorassemblyI/O assemblyPower Supply assemblyChassisIFOGELEXINTERFACECPUELEXCONTROLI BIT/ELEXELEX-GVSC.32KPROM.64KRAMoWDTJ 5VDC 5VDCDIGANLG /-2.0VDC1773-I/O RAMJJ LM,,-s o1773INTERFACEPOWERMODULE28VDC /-15VDCFIGURE4 - MajorIRU SystemSubassembliesThe IFOG Support Electronicsassemblycontainsthe closed-loopelectronicsfor all three sensors.Each channelcontainsthe bias modulationand controlelectronicsrequiredto close the loop. Theassemblyoutputs two pulse streams for each gyro -- one for a positive angular motion, and anotherfora negativeangularmotion about the input axis of the gyro. The pulses are then accumulatedon theBuilt-In Test (BIT)/controlelectronicsassembly.The BIT/controlelectronicsassemblycontainspulse accumulatorsfor countingand storing pulsesfrom the gyro electronics.The assemblyalso containsa 12 bit analog-to-digi.'talconvertersystem formeasuringtemperaturesand voltages.Temperaturesare used for compensatingthe raw pulse countsand for BIT purposes.The voltages are for monitoringpurposesas a part of the BIT. The IRU systemcontainsthe Honeywellradiation-hardenedRH1750processora MIL-STD1750Aprocessorused in spacebornecomputersystemsdesignedby Honeywell.This processorcontainsfloating point capability,and a has a throughputcapacityof 2.0 MIPS for a DAIS instructionmix using a 14 MHz clock source. The processorcurrentlyhas more than 50 percentspare throughputcapacity,and morethan 50 percentsparememory.The processorassemblycon ins32K x 16 bits of bipolar PROM that is downloadedat power-upto higher-speedRAM. The assemblycontains64K x 48 bits of static high-speedRAM. The RH1750stores data into 32 bit locations,with additionalbits used for Error Detectionand Correction(EDAC)and columnsparing.The bipolarPROM is powereddown after downloading,conservingpower.A.-
1953-09virtual consoleport is also availablefor softwaredevelopmentandtest. A watchdogtimer is usedasasanitycheckof theprocessor.The I/O assemblycontains a MIL-STD-1553B interface memory-mappedinto the processor'smemory. The assemblycontains conversioncircuitry for the XTE application to output or receivemodified signalsrequiredfor the MIL-STD-1773 receiversandtransmitters.Fiber-optic transmitters and receiversare containedin chassis-mountedconnectors(SMA 905type) manufacturedby Honeywellandapprovedby NASA (seeNASA TechnicalPaper3227).The I/Oassemblycontainsa discreteinput thatpemaitstestequipmentto enableeitherthe 1553interfaceor the1773interface.This option is usedto allow the testconfiguration to be optimized becauserate-tabletestingis difficult andexpensiveto implementwith fiber-optic slip rings.The powermodulecontainsonly low-voltagepower.The spacecraftprimary 28 V DC is convertedto the following voltagesrequiredby the IRU system: 5.0 VDC (digital electronics) 5.0VDC (analogelectronics) 15VDC -15VDC 2.0 VDC -2.0 VDC.The powermoduleoperatesperMIL-STD-1539, andis capableof operatingfrom two independentpowersources.Input power is filtered for EMI per MIL-STD-461C.8. CONCLUSIONWe have presentedthe detailsof a technologyexperimentplannedfor the X-ray TimingExplorerspace mission.The experimentconsists of placing a mediumgrade fiber optic gyroscopeinparallel with the spacecraft'sinertial referenceunit. The performanceof the fiber optic gyroscopewillbe monitoredand comparedto the he twoyear missionlife.We anticipatethat the successfulcompletionof this technologyexperimentwillgreatly assist in the technologytransfer of the fiber optic gyroscopeand other photonictechnologiestospaceapplications.9. ACKNOWLEDGMENTSThis work was supportedby NormSchulzeof NASAJHQCodeQE.10. REFERENCES1. FiberSpringerOpticR0tatiQnSensorsVerlagSeriesin Optical2. SelectedPapersMS 8. 1989.on FiberOpticand bertS. Ezekieland H. J. Ardittyeditors.1982.B. SmithEditor.3. "X-ray Timing Explorermission".H. V. Brandt, R. E. RothschildAstrophysicsSupplementSeries 07. pp. 355-360.January1993.SPIEMilestoneand J. H. Swank.SeriesAstronomyVolumeand
i is - -.T iI IRouting SlipActionMail CodeNameApprovalCall meConcurrenceFileInformationInvestigateand AdviseNote and ForwardNote and ReturnPer RequestPer Phone ConversationRecommendationSee meSignatureCirculateName/2and Destroy-I Tel. No. (or Code) & Ext.I( r other designation)CodeNASA FORM 26Z"--JUN 78 PREVIOUS EDiTiONSJE)ate , ., ,, /MAY BE USED,GPO : 1985 O - 477-116: QL3-- "
%- f.J,
Unit) will be placed on the XTE spacecraft as a separate, but distinct experiment- - . (3 sigma.) 3. [FOG IRU EXPERIMENT The proposed experiment will compare the performance of the [FOG with that of the XTE's primary gyroscope, a mechanical gyroscope, for at least 2 years. . No thermal heaters are necessary. The XTE has three MIL-STD 1773 .