Transcription
CRITERIO DE ESTABILIDAD EN EL DOMINIO DE LAFRECUENCIA PARA CONTROLADORES CONMUTADOSJorge Elso, Mario García-Sanz, Carlos MolinsDepartamento de automática y computación, Universidad pública de Navarra31006 Pamplona. mgsanz@unavarra.esResumenEn este artículo se presenta una formulación gráficade un criterio de estabilidad para sistemas linealesconmutados, derivado del conocido criterio delcírculo. El test gráfico se aplica sobre la respuestafrecuencial de las funciones de transferencia en lazoabierto. El criterio analiza si la conmutación esestable o no, proporcionando además informaciónsobre los márgenes de estabilidad a cada frecuencia.Palabras Clave: Sistemas lineales, conmutación,estabilidad, criterio del círculo1INTRODUCCIÓNEl control conmutado ha demostrado ser unaherramienta muy eficiente para cumplir especificaciones complejas en los sistemas de control [1],[2]. La mejora se obtiene diseñando varioscontroladores paralelos con diferentes características,y seleccionando continuamente entre ellos aquel quegobierna el sistema (Fig. 1). Los cambios entre lasleyes de control Gi(s) son instantáneos, y vienendados por una función de conmutación que dependedel estado del sistema y/o otros parámetrosambientales. Mediante esta técnica, y con lasfunciones de conmutación apropiadas, se puedencumplir determinadas especificaciones que nopodrían alcanzarse mediante simples controladoreslineales, tal y como predice la teoría de limitaciones[3].Una manera sencilla de diseñar un sistema de controlconmutado es usar la señal de error del sistema E(s)como entrada de la función de conmutación. Así, unobjetivo típico puede ser acelerar la respuesta delsistema cuando el error es grande, pese a hacerlomenos preciso, e invertir las características cuando elerror es pequeño. Estos conceptos están claramenteexplicados desde el punto de vista del control clásicoen [4], donde el comportamiento del sistema decontrol está dividido en dos regímenes que dependende la amplitud del error. Cuando el error es grande, elsistema está en el régimen de adquisición, y larespuesta debe ser rápida, es decir, el ancho de bandadebe incrementarse. Sin embargo, la ganancia de lazono ha de ser alta, puesto que el error es grande, eincluso con una ganancia pequeña el actuadoraplicará máxima potencia. En el régimen deseguimiento de referencia, cuando el error espequeño, el ancho de banda es reducido para evitarlos efectos del ruido, mientras que la ganancia enbaja frecuencia es incrementada para minimizar elerror de tracking y el jitter.Independientemente de si se usan esta u otras reglasde conmutación, la principal dificultad al empleartécnicas de conmutación es que la estabilidad delsistema conmutado no está asegurada sólo con laestabilidad de cada uno de los sistemasconstituyentes. Esta es la razón por la que la mayorparte de la literatura sobre control conmutado estádedicada aún a cuestiones sobre la estabilidad.Es este artículo se presenta un criterio de estabilidaden el dominio de la frecuencia para sistemas linealesconmutados. Usando cualquier técnica lineal dediseño, y aplicando el nuevo criterio gráfico, sepuede diseñar un conjunto de controladores tales quela conmutación entre ellos es estable. Mediantereglas de conmutación apropiadas, el comportamiento del sistema de control completo puede sermejorado considerablemente.2Figura 1: Esquema de control conmutado.PRELIMINARESExisten muchos resultados sobre estabilidad parasistemas conmutados [5], aunque ninguno de ellos es
general. En este artículo la atención se dirige alproblema más general, esto es, proporcionarcondiciones que aseguren la estabilidad cuando leconmutación es realizada de modo arbitrario. Se hademostrado que un sistemapropias, tienen el mismo número de polos, y elmismo número de ceros. En ese caso, el efecto de laconmutación es variar la ganancia y la posición depolos y de ceros. Las funciones de transferencia enlazo abierto de ambos sistemas sonx (t ) A(t ) x(t ), A(t ) ( {A1 ,., A m }, A i Hurwitz,(1)L1 ( s ) con conmutación arbitraria dentro del conjunto dematrices ( es exponencialmente estable si y sólo siexiste una función común de Lyapunov (CLF) paratoda Ai en el conjunto ( [6]. Se ha demostradoasimismo que la existencia de una función cuadráticacomún de Lyapunov (CQLF) es una condiciónsuficiente para la estabilidad exponencial [7].Como consecuencia, los investigadores han dedicadosus esfuerzos a buscar condiciones bajo las cuales laexistencia de una CQLF está asegurada. Enparticular, se ha demostrado que el criterio de círculoproporciona condiciones necesarias y suficientes parala existencia de una CQLF para dos sistemas enforma companion [8], [9], [10], esto es, los sistemasx (t ) Ax (t )(2)x (t ) ( A g T ) x (t )(3)ambos Hurwitz, con 0 0 0A # 0 e001""0000"0##%#0 "0 e 2 " en 20 e0 0 e 0 0 1 e2 0 0 , g , # # # en 2 0 1 en 1 1 en 1 (4)tienen una CQLF si y sólo si1 Re{ T ( sI A ) 1 g} 0, s jω, ω.(5)Un criterio equivalente en el dominio temporal espresentado en [10], demostrando que ambos sistemastienen una CQLF si y sólo si el producto de matricesA( A g T ) no tiene ningún valor propio realnegativo.3L2 ( s ) CRITERIO DE ESTABILIDADEste artículo considera la estabilidad entre dossistemas en lazo cerrado con funciones detransferencia T1(s) L1(s)/[1 L1(s)] y T2(s) L2(s)/[1 L2(s)], ambas estables, donde L1(s) P(s)G1(s) y L2(s) P(s)G2(s) son estrictamente(6)(bn 1 bn 1 ) s n 1 . (b0 b0 )s (an 1 an 1 ) s n 1 . (a0 a0 )N ( s ) N ( s ) .D( s ) D( s )n(7)Las funciones de transferencia en lazo cerrado sonT1 ( s ) L1 ( s )N ( s)y 1 L1 ( s ) D ( s ) N ( s )T2 ( s) L2 ( s)N ( s) N ( s), (9) 1 L2 ( s) D( s) D( s ) N ( s) N ( s )(8)donde las ecuaciones características se puedenescribir comoD( s) N ( s) s n en 1s n 1 . e1s e0D(s) D(s) N ( s) N ( s)100 e1bn 1s n 1 . b0N ( s)y s n an 1s n 1 . a0 D ( s ) s n (en 1 en 1 ) s n 1 . (e0 e0 )y(10)(11)con ei ai bi y ei ai bi .Usando estas expresiones para los coeficientes ei y ei, las matrices A, b, y quedan definidas.Entonces se puede aplicar el criterio del círculo paragarantizar la estabilidad con conmutación arbitraria.Con las expresiones anteriores, la ecuación (5) seconvierte en e s n 1 . e1 s e0 1 Re n n 1 0 , s jω, ω. s en 1 s n 1 . e1 s e0 (12)La parte izquierda de esta ecuación es equivalente a e s n 1 . e1s e0 Re 1 n n 1 s en 1s n 1 . e1s e0 N ( s ) N ( s ) D( s ) D( s ) Re N ( s ) D( s)
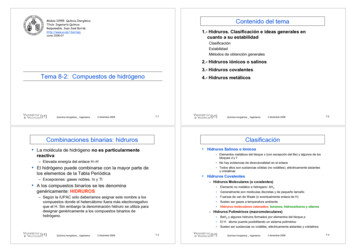
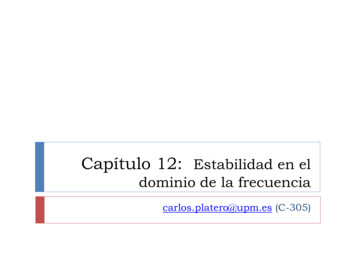
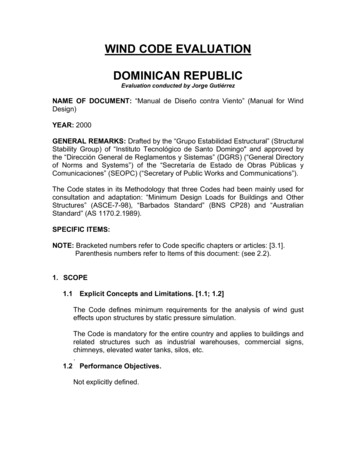
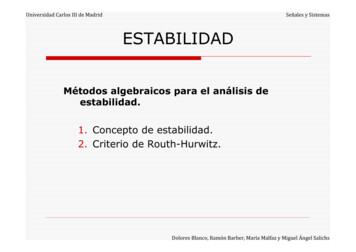
N ( s ) N ( s ) D( s ) D( s ) N ( s ) N ( s ) N ( s ) N ( s ) Re N ( s) D( s )N ( s) N (s)1 1 L ( s )2 Re 1 1L1 ( s ) N ( s ) N ( s ) , N (s) (13)de modo que la condición (12) puede ser expresadadel siguiente modo: 1 L2 ( s) D( s) D( s) 0, s jω, ω. (14)Re D( s ) 1 L1 ( s) Como esta formulación del criterio del círculo seaplica sobre funciones de transferencia en lazoabierto, debido a la simetría es suficiente concomprobarlo en las frecuencias positivas. Lacondición (14) es entonces equivalente a D( jω) D( jω) πarg{1 L2 ( jω)} arg{1 L1 ( jω)} arg D( jω)2 for all ω 0.(15)Definimosφ12 (ω) arg{1 L2 ( jω)} arg{1 L1 ( jω)},(16) D( jω) D( jω) α(ω) arg ,D( jω) (17)de modo que (15) se convierte en π2 α(ω) φ12 (ω) π2 α(ω) for all ω 0.(18)Esta ecuación nos lleva a la interpretación gráfica delcriterio de estabilidad que se muestra en la Figura 2.Existen condiciones suficientes para la estabilidad enlazo cerrado bajo conmutación arbitraria entre lasfunciones estables L1(jω) y L2(jω) si, dado L1(jω), eldiagrama de L2(jω) satisface a cada frecuencia ωi lasiguiente condición gráfica:Figura 2: Estabilidad en el plano complejo.Unir el punto crítico (-1,0) con la respuesta en lazoabierto del sistema L1(jω) a la frecuencia ωi.Entonces, trazar una perpendicular que cruce (-1,0),dividiendo el plano complejo en dos semiplanos, unode los cuales contiene a L1(jωi). Rotando esa regiónun arco dado por –α(ωi) se define el contorno B(ωi) yel área (sombreada) donde puede localizarse L2(jωi)sin poner en peligro la estabilidad del lazo cerrado.Trasladando las coordenadas que definen B(ωi) a suexpresión en magnitud (en dB) y fase, la fronterapuede ser dibujada en el diagrama de Nichols, de talmodo que puede ser fácilmente combinada contécnicas de control robusto como QFT [11].La función α(ω) puede expresarse de la siguienteforma: D( jω) D ( jω) α(ω) arg D ( jω) n ( j ω p j p j ) j 1 arg n ( jω p j ) j 1 n arg{ jω pj p j } arg{ jω p j }.(19)j 1Por lo tanto, puede considerarse como una medidadel cambio en los polos del controlador, tal y comomuestra la Figura 3. Nótese que para cada frecuenciaωi hay un diferente ángulo α(ωi).
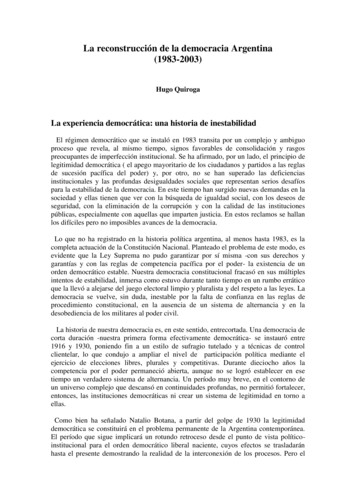
Ejemplo 1 (No existe CQLF): La estabilidad de laconmutación entre los sistemas dados por lasmatrices10 10 0 0 A1 001 , A2 001 1 2 3 2 3 1 (20)no puede ser asegurada porque A1A2 tiene dosvalores propios reales negativos [10].Figura 3: α(s) para un sistema con tres polosconmutados. α(ωi) α1(ωi) α2(ωi) α3(ωi).4BENEFICIOS DEL MÉTODOEl criterio gráfico presentado proporciona una útilherramienta lista para ser aplicada desde el comienzodel proceso de diseño del controlador. Como puedeser aplicado en cualquiera de los diagramashabituales en el dominio de la frecuencia, losingenieros pueden combinarlo fácilmente con otrasespecificaciones de control clásicas. El criterioproporciona información sobre el rango defrecuencias donde las condiciones fallan o estáncerca de fallar, de tal modo que el diseñador sabe quécambios deben hacerse para asegurar la estabilidad.Además, el criterio puede ser aplicado en la habitualsituación en la que el diseñador no tiene un modelomatemático de la planta, sino sólo su respuestafrecuencial.Finalmente, el criterio es aplicable a sistemas conincertidumbre. Para estos sistemas, el template es elárea de las posibles plantas dentro de laincertidumbre a cada frecuencia ωi. Si el sistema esgobernado por un controlador conmutado, cada puntodel template cambia su posición debido a laconmutación, y ese cambio debe satisfacer el criterioanterior para estar seguros de que la conmutación esestable. Suponiendo –como es habitual en controlrobusto- que los cambios en la planta debidos a laincertidumbre son lentos, sólo hay que comprobar elcriterio entre cada punto del template inicial con sucorrespondiente del template final.5Asumamos que A1 y A2 representan dos sistemas enlazo cerrado. Aplicando la nueva formulación, seencuentra que el rango de frecuencias donde laestabilidad no está asegurada va desde 1 rad/s hasta1.41 rad/s. Lo que debe hacer el diseñador dependede las funciones de transferencia en lazo Li(s) quedefinen los sistemas en lazo cerrado A1, A2. Porejemplo, éstos pueden venir de la conmutación entrelas siguientes funciones de transferencia:L1 ( s) ( s 1),s( s 2.618)( s 0.382)(21)L2 ( s ) 2( s 1).s ( s 0.5 0.8666 j )(22)En ese caso, la conmutación produce un incrementoen la ganancia y un cambio de dos polos reales porun par de polos complejos conjugados. La Figura 4muestra lo que sucede en una frecuencia donde lacondición (ωi 1.25 rad/s). Una solución sencillapodría ser reducir la ganancia del segundocontrolador para llevar su diagrama de Nyquist haciala derecha. Se ha comprobado que multiplicando lafunción de transferencia L2(s) por 0.87 la estabilidaddel sistema conmutado está asegurada.EJEMPLOSEn primer lugar se analizan los mismos dos ejemplospresentados en [10] para mostrar la validez y utilidaddel método en el análisis de estabilidad. Después sepropone un ejemplo de aplicación práctica quemuestra cómo se puede usar la conmutación establepara mejorar las características de los diseñoslineales.Figura 4: Diagrama de Nyquist y contorno enω 1.25 rad/s.
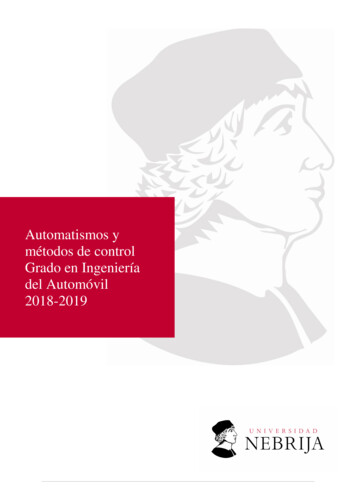
Por el contrario, si para el mismo ejemplo laconmutación se realiza entre las siguientes funcionesde transferencia:L1 ( s ) L2 ( s) 3s ( s 0.6667),( s 1)( s 0.5 0.8666 j )( s 2.618 )( s 0.382 ),( s 1)( s 0.5 0.8666 j )(23)(24)entonces lo que cambian son los ceros, así que α(ω)es nulo para todas las frecuencias. Trasladando lacondición del plano complejo al diagrama deNichols, se dibuja un contorno B(ωi) para cadafrecuencia ωi, limitando el área donde L2(jωi) puedelocalizarse. La Figura 5 muestra el contorno en ωi 1.2 rad/s. Si L2(jωi) está por debajo de B(1.2), elsistema es estable. En otro caso, puede ser inestable.Como L2(1.2j) no está por debajo del contorno, elcriterio no asegura la estabilidad exponencial paraesa conmutación. Una solución sencilla sería que elcero de baja frecuencia permanezca más cerca del ejeimaginario (s -0.3). Haciendo esto, el contorno nocambia, y el diagrama de Nichols de L2(jω) no semueve tanto hacia la izquierda, de modo que lascondiciones que aseguran conmutación estable soncumplidas.L1 ( s ) 1,s ( s 2)( s 1)(26)L2 ( s ) 1.s ( s 2.618)( s 0.382)(27)Ahora el sistema es analizado en el diagrama deNichols a esas frecuencias críticas. La Figura 6muestra el contorno B(ωi) generado por el criteriopara ωi 0.75 rad/s. Si L2(jωi) está por debajo delcontorno B(0.75), el sistema es estable. En otro casopuede ser inestable. Como L2(0.75j) está por debajo,la condición se cumple a esa frecuencia. Secomprueba que L2(jω) aún podría aumentar suganancia hasta un factor de 2.2 y seguir cumpliendoel criterio.Figura 6: Diagrama de Nichols y contorno enω 0.75 rad/s.Figura 5: Diagrama de Nichols y contorno enω 1.20 rad/s.Ejemplo 2 (Existe CQLF): La estabilidad de laconmutación entre los sistemas dados por lasmatrices0 10 0 1 0 1 A1 001 , A 2 0 0 1 2 3 1 1 3 Asumamos de nuevo que esas matrices representandos sistemas en lazo cerrado. El rango de frecuenciasdonde las condiciones que garantizan la estabilidadestán más cerca de fallar se localiza alrededor de 0.75rad/s. Asumamos además que la conmutación queproduce esas matrices es realizada entre las funcionesde transferencia en lazo abierto(25)está asegurada porque A1A2 no tiene valores propiosreales negativos [10].Sin embargo, si el polo en s -2 permanece en esaposición y sólo se mueve el polo en s -1, entoncesel sistema sólo puede multiplicarse por 1,57 sinproducir un fallo en el criterio.Ejemplo 3 (Solución para el benchmark ACC’92):Una de las numerosas soluciones publicadas para elsistema dos masas-muelle (Fig. 7) presentado en laACC’92 [12] es mejorado mediante la aplicación deuna estrategia de conmutación.
x1ux2m11.61.4m2w11.2w21x2 positionk0.80.6switching controller0.40.2Figura 7: Sistema dos masas-muelle(m1 m2 k 1).0-0.2fixed controller-0.4El controlador lineal para ser modificado [13] es:05101520253035404550timeG(s) 2246.3( s 0.237)( s 2 -0.681s 1.132)( s 33.19)( s 11.79)( s 2 4.95s 7.563). (28)Figura 9: Respuesta a perturbación impulso w2en m2 en el instante t 5 s.Para el régimen de adquisición, un polo es situadocerca del origen, mientras que en seguimiento dereferencia, es un cero el que es acercado. El valor enel error que produce una conmutación esseleccionado basándose en simulaciones con elcontrolador original. Haciendo esto, el nuevocontrolador es21.8x2 position1.4 2246.3(s 0.237)( s 2 -0.681s 1.132)para e(t ) 0.5 2 ( s 33.19)(s 10.5)( s 4.95s 7.563)G(s) 2246.3(s 0.13)( s 2 -0.681s 1.132) para e(t ) 0.5 ( s 33.19)(s 11.79)( s 2 4.95s 7.563)1x2 position10.80.40.2005101520253035404550timeFigura 10: Respuesta ante cambio de referenciaescalón en el instante t 5 s.6CONCLUSIONESSe ha presentado un nuevo criterio para comprobar laestabilidad de sistemas lineales conmutados. Consisteen un test gráfico en el dominio de la frecuencia queestá orientado a la práctica de la ingeniería decontrol. Además, es válido para sistemas conincertidumbre. Se han presentado tres ejemplos paramostrar cómo se aplica el método y los beneficiospotenciales del uso del control conmutado.1.20.8switching controller1.20.6(29)La estabilidad del diseño ha sido asegurada aplicandola técnica presentada. Las figuras de 8 a 10 muestranla mejora, con respecto al diseño introducido en [13],en las respuestas transitorias del sistema anteperturbaciones en las masas 1 y 2 y ante un cambioen la referencia.fixed controller1.6switching controller0.60.40.20Agradecimientos-0.2-0.4fixed controller051015202530354045timeFigura 8: Respuesta a perturbación impulso w1en m1 en el instante t 5 s.50Los autores agradecen la ayuda prestada por elMinisterio de Educación y Ciencia a través delproyecto CICYT DPI’2006-15522-C02-01, así comoa la Universidad Pública de Navarra.Referencias
[1] N. Harris Mcclamroch and I. Kolmanovsky,"Performance benefits of hybrid control designfor linear and nonlinear systems," Proceedingsof the IEEE, vol. 88, pp. 1083-1096, 2000.[2] A. Feuer, G. C. Goodwin, and M. Salgado,"Potential benefits of hybrid control for lineartime invariant plants," presented at Proceedingsof the American Control Conference, 1997.[3] M.M. Seron, J.H. Braslavsky, and G.C.Goodwin, Fundamental limitations in filteringand control, Springer, London, 1997.[4] B.J. Lurie, and P.J. Enright, Classical feedbackcontrol with MATLAB, Marcel Dekker, NewYork, 2000.[5] Robert Shorten, Fabian Wirth, Oliver Mason,Kai Wulff and Christopher King, “Stabilitycriteria for switched and hybrid systems”, SIAMReview, 2006.[6] A. P. Molchanov and E. S. Pyatnitskii, “Criteriaof asymptotic stability of differential anddifference inclusions encountered in controltheory,” Systems & Control Letters, vol. 13, pp.59-64, 1989.[7] W. P. Dayawansa and C. F. Martin, “A converseLyapunov theorem for a class of dynamicalsystems which undergo switching,” IEEETransactions on Automatic Control, vol. 44, pp.751-760, 1999.[8] K. Narendra and R. Goldwyn, "A GeometricalCriterion for the Stability of Certain NonlinearNonautonomous Systems," IEEE Transactionson Circuits and Systems, vol. 11, pp. 406-408,1964.[9] J. Willems, "The circle criterion and quadraticLyapunov functions for stability analysis,"IEEE Transactions on Automatic Control, vol.18, pp. 184, 1973.[10] R. N. Shorten, O. Mason, F. O'Cairbre, and P.Curran, "A unifying framework for the SISOcircle criterion and other quadratic stabilitycriteria," International Journal of Control, vol.77, pp. 1-8, 2004.[11] Houpis, C.H., S.J. Rasmussen and M. GarciaQuantitativeFeedbackTheory.Sanz.Fundamentals and Applications. 2nd Edition. ACRC Press book, Taylor & Francis, 2006[12] B. Wie and D. Bernstein, “Benchmark problemsfor robust control design ,“ Journal ofGuidance, Control, and Dynamics, vol. 15, pp.1057-1059, 1992.[13] E. G. Collins Jr., J. A. King, and D. S.Bernstein, "Robust control design for abenchmark problem using the maximumentropy approach," presented at Proceedings ofthe American Control Conference, 1991.
asimismo que la existencia de una función cuadrática común de Lyapunov (CQLF) es una condición suficiente para la estabilidad exponencial [7]. Como consecuencia, los investigadores han dedicado sus esfuerzos a buscar condiciones bajo las cuales la existencia de una CQLF está asegurada. En particular, se ha demostrado que el criterio de .