Transcription
Tema 6.- ESTABILIDAD EN SISTEMAS DE ECUACIONESDIFERENCIALESAmpliación de Matemáticas.Ingeniería Técnica Industrial. Especialidad en Electrónica Industrial.Índice General1 Introducción12 Sistemas autómonos. Plano de fases23 Clasificación de los puntos de equilibrio en sistemas lineales54 Estabilidad mediante linealización125 Método directo de Liapunov171IntroducciónHasta ahora, en el estudio de las ecuaciones diferenciales, nos hemos centrado en el problema de obtener soluciones, exponiendo algunos métodos de resolución de ciertos tipos de ecuaciones y sistemasdiferenciales.En este tema vamos a dar otro enfoque al estudio de las ecuaciones y sistemas diferenciales, planteándonos ahora el obtener información cualitativa sobre el comportamiento de las soluciones. Este nuevoenfoque tiene un interés obvio debido a dos razones fundamentales: muchas ecuaciones diferenciales nolas sabemos resolver e incluso, aunque se pudieran calcular sus soluciones, a veces no es necesario determinarlas explícitamente pues sólo se pretende conocer el comportamiento de las mismas (y puede sercostosa la obtención de dichas soluciones para el estudio que se quiere realizar).Vamos a ver un ejemplo en que se manifiestan estas ideas:Consideremos que x1 (t) y x2 (t) representan las poblaciones, a lo largo del tiempo, de dos especies quecompiten entre sí por el alimento y el espacio vital limitados en su microcosmos. Supongamos que lastasas de crecimiento de las poblaciones, x1 (t) y x2 (t), están gobernadas por un sistema de ecuacionesdiferencialesX0 (t) f (t, X(t)) donde X(t) µx1 (t)x2 (t)¶En la mayoría de los casos este sistema será de tal forma que no sabremos calcular sus soluciones,esto es, no podremos obtener x1 (t) y x2 (t), que nos dirían el número de individuos de cada especie enun tiempo t. Sin embargo, hay algunas propiedades de tipo cualitativo, que son interesantes y a lasque con frecuencia pueden darse respuestas satisfactorias sin necesidad de determinar explícitamente lassoluciones. Por ejemplo, consideremos las siguientes cuestiones:1. ¿Hay valores para los cuales ambas especies coexisten en un regimen permanente? Es decir, ¿existennúmeros α, β tales que x1 (t) α y x2 (t) β son soluciones del sistema X0 (t) f (t, X(t))? Si talesvalores existen se les llama valores (soluciones) de equilibrio o puntos críticos.2. Supongamos que las dos especies coexisten en equilibrio, e introducimos en un momento t, algunosmiembros de una de las especies presentes en el microcosmos donde conviven. ¿Permanecerán las1
Tema 6. Estabilidad en sistemas de ecuaciones diferenciales. Ampliación de Matemáticas. Esp. Electrónica Industrial.2poblaciones cerca de los valores de equilibrio para todo tiempo futuro?, es decir, si φ(t) es unasolución de equilibrio del sistema X0 (t) f (t, X(t)), y ψ(t) es otra solución tal que φ(t0 ) estápróximo a ψ(t0 ), ¿se verificará que ψ(t) φ(t) cuando t ?.3. Si conocemos el número de individuos de cada especie en un tiempo t0 , ¿Cuál será la evolución delas especies cuando transcurre el tiempo? Si no tienden a valores de equilibrio, ¿triunfará una delas especies?Veremos, en este tema, que para responder a estas cuestiones no necesitamos resolver el sistemaX0 (t) f (t, X(t)). Para ello, empezaremos en la siguiente sección definiendo los principales conceptos.2Sistemas autómonos. Plano de fasesUn sistema autónomo plano es un sistema de dos ecuaciones diferenciales de la forma dx dt F (x, y) dy G(x, y)dt(1)donde supondremos que F y G son funciones continuas y con derivadas parciales de primer orden continuasen todo el plano. En este caso, las funciones F y G se dicen de clase C 1 en todo R2 (F, G R2 ). Estascondiciones sobre F y G garantizan la existencia y unicidad de solución, definida para todo t R, delproblema de valor inicial½ 0x(t0 ) x0x F (x, y)y 0 G(x, y)y(t0 ) y0para cualquier t0 R y (x0 , y0 ) R2 .El sistema se denomina autónomo porque la variable independiente t no aparece explícitamente enlos segundos miembros de las ecuaciones dada.Recordemos también que, si tenemos una ecuación diferencial de segundo orden, en este caso autónoma,µ¶d2 xdx f x,dt2dtpodemos convertirla en un sistema autónomo introduciendo una nueva variable y ½dx, y nos quedadtx0 yy 0 f (x, y)Las variables dependientes x(t) e y (t) se llaman a veces variables de estado del sistema. El planoformado por los pares de valores (x, y) se suele llamar plano de las fases.Cada solución del sistema (1) es un par de funciones x(t) e y(t) que definen una curva C [x(t), y(t)]en el plano XY o plano de fases. Obsérvese que cada punto de la curva C nos determina el estado delsistema en un instante t correspondiente a una condiciones iniciales determinadas, y que por ello es degran interés el conocimiento de este tipo de curvas, que se suelen llamar trayectorias u órbitas. En cadapunto (x, y) de una órbita, el vector (F (x, y) , G (x, y)) es un vector tangente a dicha órbita, por eso elconjunto de vectores (F (x, y) , G (x, y)) se llama campo de direcciones del sistema.Debe observarse que una solución en la que x(t) x0 e y(t) y0 para todo t R define únicamenteun punto (x0 , y0 ) en el plano de fases y verifica que F (x0 , y0 ) G (x0 , y0 ) 0. Se dice entonces (x0 , y0 )
Tema 6. Estabilidad en sistemas de ecuaciones diferenciales. Ampliación de Matemáticas. Esp. Electrónica Industrial.3es un punto crítico o un equilibrio del sistema. Cada punto del plano de las fases o bien es un puntocrítico o bien por él pasa una única trayectoria.Las propiedades cualitativas de las órbitas nos permiten obtener información sobre el comportamientode las soluciones.1. Cada trayectoria del plano de fases representa infinitas soluciones del sistema autónomo: esto es, si(x (t) , y (t)) es una solución del sistema (1), entonces para cada c R se tiene que (x̃ (t) , ỹ (t)) (x(t c), y(t c)) es otra solución de (1).2. Dos trayectorias carecen de puntos comunes: es decir, si (x (t) , y (t)) y (x̃ (t) , ỹ (t)) son solucionesdel sistema (1), tales que la primera solución en t0 vale (x0 , y0 ) y la segunda en t1 toma los mismosvalores (x0 , y0 ), entonces existe un valor c R tal que (x̃ (t) , ỹ (t)) (x(t c), y(t c)).3. Las trayectorias cerradas corresponden a soluciones periódicas: si (x (t) , y (t)) es una solucióndel sistema (1) que en dos instantes t0 y t0 T toma el mismo valor, entonces (x (t) , y (t)) (x(t T ), y(t T )) para todo t, es decir (x (t) , y (t)) es periódica.Muchas veces es posible obtener las trayectorias descritas por las soluciones de un sistema autónomo,sin necesidad de obtener explícitamente dichas soluciones. Supongamos que (x (t) , y (t)) es una solucióndel sistema (1) que no permanece constante en el tiempo (esto es, no se trata de una solución de equilibriodxo punto crítico), y la derivadaes distinta de cero en t t1 , entonces en un entorno del punto x1 x(t1 )dtse verifica quedydy dtG(x, y) · .dxdt dxF (x, y)Por tanto, la trayectoria de esa solución verifica la ecuación diferencial de primer ordenG(x, y)dy .dxF (x, y)dxdynula para todo t, se tendrá que verificar queno siempre sea nula, por lo quedtdtF (x, y)dx . En cualquierla trayectoria de esa solución verifica, análogamente, la ecuación diferencialdyG(x, y)caso, las trayectorias se podrán determinar resolviendo una ecuación diferencial de primer orden.Caso de ser la derivadaVeamos algunos ejemplos de determinación de trayectorias y puntos críticos.Ejemplo 2.1 Considérese el sistema autónomo½ 0x 2xyy 0 y 2 x2Su único punto crítico es el punto (0, 0). Las demás trayectorias se pueden obtener resolviendo la ecuaciónhomogéneadyy 2 x2 dx2xyy comprobando que las trayectorias son todas las circunferencias de centro (a, 0) y radio a , excluyendode ellas el punto (0, 0).Ejemplo 2.2 Los puntos de equilibrio del sistema½ 0x 1 yy 0 x3 yson los puntos (x, y) que verifican 1 y 0, x3 y 0. Por tanto, existe un único punto crítico quees ( 1, 1). Es decir, (x(t), y(t)) ( 1, 1) es la única solución que permanece constante en el tiempo.
Tema 6. Estabilidad en sistemas de ecuaciones diferenciales. Ampliación de Matemáticas. Esp. Electrónica Industrial.4Ejemplo 2.3 Los puntos de equilibrio del sistema½ 0x (x 1)(y 1)y 0 (x 1)(y 1)son los puntos (1, 1) y ( 1, 1) ya que son los únicos que verifican½(x 1)(y 1) 0,(x 1)(y 1) 0.Ejemplo 2.4 Los puntos de equilibrio del sistema diferencial½ 0x x(y 1)y 0 x(y 1)son los puntos (x, y) que verifican el sistema½x(y 1) 0,x(y 1) 0.Por tanto, hay infinitos puntos críticos, todos los puntos de la recta x 0.Ejemplo 2.5 Consideremos ahora un ejemplo físico: el péndulo matemático. La ecuación del movimientodel péndulo viene dada pord2 θ g sen θ 0dt2lsiendo l la longitud de la varilla del péndulo y θ el ángulo que forma la varilla con la vertical.El sistema diferencial de primer orden equivalente a la ecuación anterior es, llamando x1 θ ydθx2 , el siguiente:dt dx1 dt x2 dx2 g sen x1dtlEste sistema tiene infinitas soluciones de equilibrio. Los puntos críticos son todos los de la forma (kπ, 0)con k Z.dθLos puntos (0, 0) y (π, 0) son puntos críticos. El primero de ellos tiene x1 θ 0, x2 0,dtpor tanto, estamos en la siguiente situación: no hay desplazamiento de la vertical, y la velocidad esdθ 0, por tanto, estamos en la siguientenula. El segundo punto crítico tiene x1 θ π, x2 dtsituación: el ángulo de desplazamiento es π, y la velocidad es nula. En cualquiera de estas dos situacionesel péndulo continuará así indefinidamente. Sin embargo, estos dos puntos de equilibrio son diferentes.Cuando nos encontramos en la situación de equilibrio (0,0), ante cualquier pequeño cambio de la situación(cambio de posición o de velocidad), el sistema presentará pequeñas oscilaciones. Sin embargo, cuandonos encontramos en la situación de equilibrio (π, 0), estos pequeños cambios harán que el sistema presenteuna notable desviación.En estas situaciones diremos que el punto (0, 0) es estable, y el punto (π, 0) inestable (a continuacióndefiniremos formalmente el concepto de estabilidad)Supondremos en lo que sigue que los puntos críticos de los sistemas autónomos que consideremosestán aislados, esto es, existe un entorno del punto crítico donde no hay otro punto crítico. Además,supondremos que el punto crítico aislado a estudiar es el (0, 0), lo cual no supone ningún tipo de restricción
Tema 6. Estabilidad en sistemas de ecuaciones diferenciales. Ampliación de Matemáticas. Esp. Electrónica Industrial.5pues de no ser así bastará hacer un cambio de coordenadas adecuado: Si (x0 , y0 ) es un punto de equilibriodel sistema (1), el cambio de variableX x x0 , Y y y0(2)transforma dicho sistema en dX dt F (X x0 , Y y0 ) dY G (X x0 , Y y0 )dt(3)y (0, 0) es un punto de equilibrio de (3).En estas condiciones introducimos la noción de estabilidad del punto crítico.Definición 2.1i) Se dice que el punto crítico (0,0) del sistema (1) es estable si para todo númeroR 0, existe algún r 0, r R, tal que cada trayectoria que está dentro del círculo x2 y 2 r2en algún momento t t0 , permanezca dentro del círculo x2 y 2 R2 para todos los t t0 : estoes, si una trayectoria está cerca del punto de equilibrio, se mantendrá cerca a lo largo del tiempo.ii) Se dice que el punto crítico (0,0) del sistema (1) es asintóticamente estable, cuando es establey existe algún número r0 0, tal que toda trayectoria que está dentro del círculo x2 y 2 r02 enalgún momento t t0 , se aproxime al origen cuando t . La expresión “se aproxime al origencuando t ” se deberá entender de la siguiente forma: si C (x(t), y(t)) es una trayectoria,deberá verificarse que x(t) 0, e y(t) 0 cuando t ; es decir, las trayectorias cercanas nosólo se mantienen cerca, sino que se aproximan al punto de equilibrio a lo largo del tiempo.iii) Se dice que el punto crítico (0,0) del sistema (1) es inestable cuando no es estable: las trayectoriasque empiezan cerca del punto de equilibrio se alejan de este punto a lo largo del tiempo.En lo que sigue nos centraremos en el estudio de las dos cuestiones siguientes, las cuales constituyenuna parte esencial del plano de fases del sistema:— La disposición de las trayectorias cerca del punto crítico (0,0).— La estabilidad o inestabilidad del punto crítico (0,0).3Clasificación de los puntos de equilibrio en sistemas linealesVeremos seguidamente que, en el caso de los sistemas autónomos lineales, la naturaleza y estabilidad delpunto crítico queda caracterizada por los autovalores de la matriz del sistema. Consideremos un sistemaautónomo lineal dx dt a1 x b1 y(4) dy a2 x b2 ydt¶µa1 b1del sistemapara el que (0, 0) es su único punto crítico. Esto equivale a que la matriz A a2 b2tenga determinante no nulo, y por ello que los autovalores λ1 , λ2 sean diferentes de cero. En funcióndel comportamiento de las trayectorias en relación con el punto crítico aislado (0, 0), el punto crítico sedenominará: nodo, punto de silla, centro, o foco.El punto crítico es un nodo.
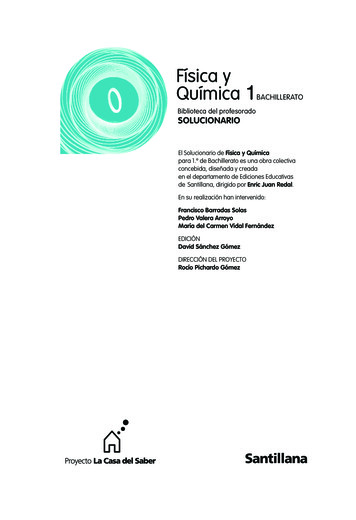
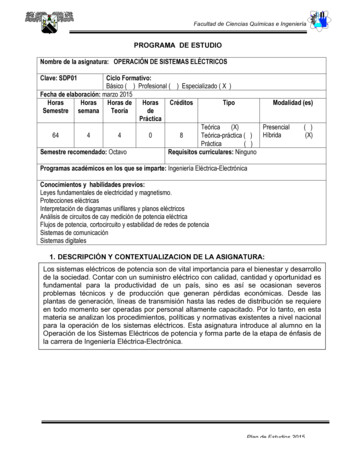
Tema 6. Estabilidad en sistemas de ecuaciones diferenciales. Ampliación de Matemáticas. Esp. Electrónica Industrial.6Este caso se presenta cuando los autovalores λ1 , λ2 son reales y del mismo signo. El diagrama de fasestiene las siguientes características:a) Todas las trayectorias se acercan al origen, lo cual se corresponde al caso de ser los autovaloresnegativos.b) Todas las trayectorias se alejan del origen, lo cual se corresponde al caso de ser los autovalores positivos.Por esta razón, en el caso que el punto crítico sea un nodo, éste será o bien asintóticamente estable(autovalores negativos), o bien inestable (autovalores positivos).Ejemplo 3.1 Consideremos el sistema autónomo lineal½ 0x xy 0 x 2ySus soluciones son x (t) C1 et , y (t) C1 et C2 e2t con C1 , C2 R. Analicemos las trayectorias:Cuando C1 0 y C2 6 0, se tiene x 0, y C2 e2t . Estas soluciones determinan dos únicastrayectorias. Si C2 0, la trayectoria es la parte positiva del eje OY, y si C2 0, la trayectoria esla parte negativa del eje OY . En ambos casos las trayectorias se recorren alejándose del punto críticocuando t .Cuando C2 0 y C1 6 0, tenemos x C1 et , y C1 et . Estas soluciones determinan dos nuevastrayectorias. Una trayectoria es la semirrecta bisectriz del primer cuadrante, que corresponde al casoC1 0. La otra es la semirrecta bisectriz del tercer cuadrante, que corresponde al caso C1 0. En amboscasos, las trayectorias se recorren alejándose del punto crítico cuando t .Si C1 y C2 son distintos de cero, entonces tenemos, eliminando el parámetro t, que las trayectoriasC2verifican la ecuación y x 2 x2 . En realidad, dicha ecuación corresponde a dos trayectorias (véase enC1la Figura 1). Es fácil comprobar que en los puntos de dichas trayectorias, a medida que nos aproximamosal (0, 0), la pendiente de la recta tangente se va aproximando a 1.El punto crítico (0,0) de este sistema es un nodo y el diagrama de las fases se muestra en la Figura1.Figura 1: Nodo.Obsérvese que los autovalores del sistema lineal considerado son reales, distintos y del mismo signo(positivo). En este caso, toda trayectoria sale del punto (0,0) cuando t , hay cuatro trayectorias
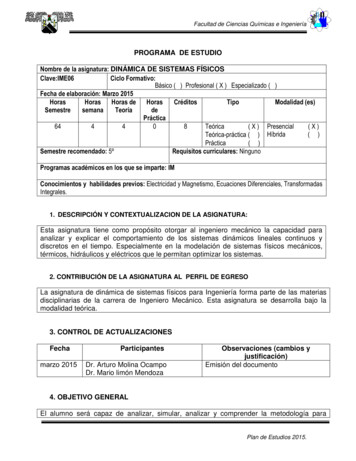
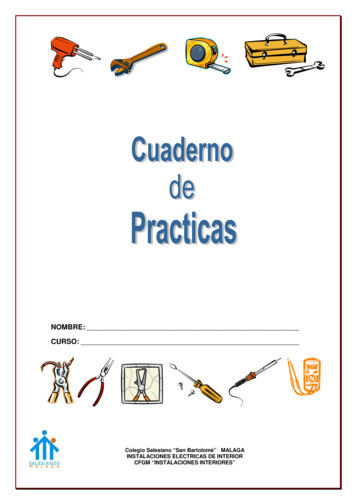
Tema 6. Estabilidad en sistemas de ecuaciones diferenciales. Ampliación de Matemáticas. Esp. Electrónica Industrial.7en forma de semirrecta que determinan dos rectas que pasan por el origen, y el resto de las trayectoriasse asemejan a porciones de parábolas. Es fácil entender que si los autovalores hubieran sido negativos,toda trayectoria entra al punto (0,0) cuando t .Cuando un sistema lineal tiene autovalores reales, del mismo signo, pero además iguales (λ el únicoautovalor de la matriz del sistema), las configuraciones de las trayectorias son algo diferentes, aunqueguardan cierta relación con las anteriores (véanse las Figuras 2 y 3). En este caso el punto crítico aisladodel sistema se sigue denominando nodo (aunque se suele llamar nodo impropio).Figura 2: Nodo impropio con dim(V (λ)) 2.Figura 3: Nodo impropio con dim(V (λ)) 1.
Tema 6. Estabilidad en sistemas de ecuaciones diferenciales. Ampliación de Matemáticas. Esp. Electrónica Industrial.8El punto crítico es un punto de silla.Este caso se presenta cuando los autovalores λ1 , λ2 son reales y de distinto signo. Cuando t ,nos encontramos con dos trayectorias rectas que se acercan al origen y otras dos trayectorias rectas quese separan del origen. Esto nos permite concluir, que todo punto de silla es inestable.Ejemplo 3.2 Consideremos el sistema lineal½x0 xy 0 3ySus soluciones son x(t) C1 et , y(t) C2 e 3t . Analicemos las trayectorias:Cuando C1 0 y C2 6 0, se tiene x(t) 0, y(t) C2 e 3t . Todas estas soluciones determinan dosúnicas trayectorias que descansan sobre la recta x 0. Cuando C2 0, la trayectoria es la semirrectax 0 con y 0. Cuando C2 0, la trayectoria es la semirrecta x 0 con y 0. Cuando t ,ambas trayectorias “entran” en el origen.Cuando C1 y C2 son ambos no nulos, la trayectoria correspondiente a la solución x(t) C1 et , y(t) C2C2 e 3t descansa sobre la curva de ecuación y 3 x 3 . Este tipo de curvas semejan hipérbolas, yC1C2constan de dos ramas situadas en los cuadrantes primero y tercero cuando 3 0, o bien en losC1C2cuadrantes segundo y cuarto cuando 3 0. Cada una de dichas ramas constituye una trayectoria.C1Este punto crítico aislado (0, 0) es un punto de silla. Hay cuatro trayectorias en forma de semirrecta,que determinan dos rectas que pasan por el origen. Cuando t , dos de esas trayectorias se recorrenhacia el origen; las otras dos,“salen” del origen. Entre estas semirrectas hay cuatro regiones, cada unade las cuales contiene trayectorias que se asemejan a ramas de hipérbolas. Cuando t , estastrayectorias no tienden hacia el punto crítico, sino que son asintóticas a algunas de las semirrectas queentran (véase la Figura 4).Figura 4: Punto de silla.El punto crítico es un centro.
Tema 6. Estabilidad en sistemas de ecuaciones diferenciales. Ampliación de Matemáticas. Esp. Electrónica Industrial.9Figura 5: Centro.Este caso se presenta cuando los autovalores son imaginarios puros. Las trayectorias son curvascerradas que rodean al origen, que en general tienen forma de elipses, de modo que ninguna trayectoriatiende a él cuando t o t . Por ello, el punto crítico es estable, pero no asintóticamenteestable.Ejemplo 3.3 Consideremos el sistema autónomo lineal½ 0x yy0 xSus soluciones son x(t) C1 cos t C2 sen t, y(t) C sen t C2 cos t.Las trayectorias las determinamos en este caso resolviendo la ecuación diferencialydy xdyy así obtenemos que las trayectorias son todas las circunferencias centradas en el origen (véase la Figura5).En este caso el punto crítico aislado (0, 0) se denominado centro, y las trayectorias se recorren, parat 0, en sentido contrario al de las agujas del reloj.El punto crítico es una espiral o foco.Este caso se presenta cuando los autovalores son complejos conjugados y tienen parte real no nula.Las trayectorias son curvas en forma de espiral que, conforme t , pueden presentar dos situaciones:a) Todas se acercan al origen, caso de ser la parte real de los autovalores negativa.b) Todas se separan del origen, caso de ser la parte real de los autovalores positiva.Así, pues, un punto crítico foco es o bien asintóticamente estable (autovalores con parte real negativa),o bien es inestable (autovalores con parte real positiva).Ejemplo 3.4 Consideremos el sistema autónomo lineal½ 0x 2x yy 0 x 2y
Tema 6. Estabilidad en sistemas de ecuaciones diferenciales. Ampliación de Matemáticas. Esp. Electrónica Industrial.10Las soluciones son x(t) e2t [C1 cos t C2 sen t],y(t) e2t [C1 sen t C2 cos t].Determinamos las trayectorias resolviendo la ecuación diferencialdyx 2y dx2x yque es una ecuación homogénea cuyas soluciones son curvas en el plano de fases. Para ver cuál es laforma de estas órbitas hacemos un cambio a coordenadas polares en la solución obtenida resultandor Ce2θy aquí podemos reconocer a una familia de espirales logarítmicas que se muestran en la Figura 6.Figura 6: Foco.Obsérvese que los autovalores de este sistema son complejos conjugados a ib, pero no imaginariospuros (b 6 0). En esta situación, el punto crítico se denominará foco o espiral. En este caso, lastrayectorias son espirales que se enrollan a su alrededor. Por otra parte, todas se comportan de la mismaforma: tienden al (0,0) cuando t , caso de ser a 0, o bien salen del (0,0), cuando a 0.El siguiente resultado resume los diferentes comportamientos de las trayectorias desde el punto devista de la estabilidad.Teorema 3.1 El punto crítico (0,0) del sistema lineal (4) es estable si y sólo los autovalores tienen partereal no positiva; si existe un autovalor con parte real positiva, entonces el punto crítico (0,0) del sistemalineal (4) es inestable; el punto crítico (0,0) del sistema lineal (4) es asintóticamente estable si y sólo silos autovalores tienen parte real negativa.Hemos visto que la naturaleza y la estabilidad del punto crítico de un sistema autónomo lineal sepueden describir atendiendo a sus autovalores. Pasaremos ahora a ver que, con la misma facilidad, estascaracterísticas se pueden describir en términos de la traza T traza(A) y del determinante D det(A)de la matriz A de coeficientes del sistema teniendo en cuenta que el polinomio característico de A vienedado porpA (λ) λ2 T λ D.
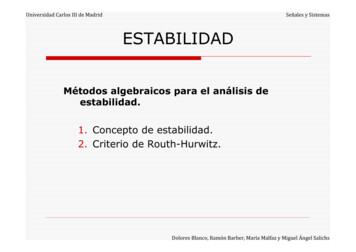
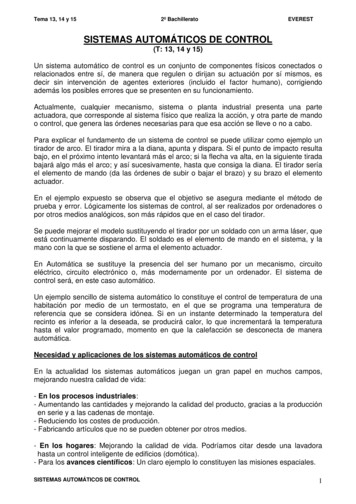
Tema 6. Estabilidad en sistemas de ecuaciones diferenciales. Ampliación de Matemáticas. Esp. Electrónica Industrial.11En efecto, si λ1 , λ2 son los autovalores de la matriz del sistema , T λ1 λ2 y D λ1 λ2 , y además setiene T T 2 4Dλ1 , λ2 2siendo D 6 0, ya que el cero no puede ser autovalor.Ahora, atendiendo a los diferentes valores de T y D tenemos:1. Si T 2 4D 0, entonces los autovalores λ1 , λ2 son complejos conjugados. Además, como tienenparte real igual a T /2, resulta:- son imaginarios puros si y sólo si T 0 (centro y estabilidad)- tienen parte real negativa cuando T 0 (foco y estabilidad asintótica)- tienen parte real positiva cuando T 0 (foco e inestabilidad)Por ello, al considerar el plano T D, podremos asegurar que por encima de la parábola T 2 4D 0se tiene (véanse las Figuras):- En el eje OD se presentan los centros y hay estabilidad.- A la izquierda del eje OD se presentan los focos y hay estabilidad asintótica.- A la derecha del eje OD también se presentan focos, pero hay inestabilidad.2. Si D 0, entonces se tiene T 2 4D T 2 . Por ello los autovalores son reales y de distinto signo.Se presentan puntos de silla e inestabilidad. Por ello, al considerar el plano T D, por debajo del ejeOT se presentan puntos de silla e inestabilidad (véanse las Figuras).3. Si D 0 y T 2 4D 0, entonces los autovalores son reales y tienen el mismo signo que T . De ahíque:a) Si T 0, se tenga:- Cuando T 2 4D 0, entonces los autovalores son iguales y negativos (nodo impropio,estabilidad asintótica).- Cuando T 2 4D 0, entonces los autovalores son reales, distintos y negativos (nodo,estabilidad asintótica)b) Si T 0, se tenga:- Cuando T 2 4D 0, entonces los autovalores son iguales y positivos (nodo impropio,inestabilidad)- Cuando T 2 4D 0, entonces los autovalores son reales, distintos y positivos (nodo,inestabilidad)Estos casos nos aseguran que en la parte izquierda de la parábola T 2 4D 0 nos encontramos nodosy estabilidad asintótica. En la parte derecha de la dicha parábola también se presentan nodos, pero hayinestabilidad. Por otro lado, por debajo de la parábola T 2 4D 0, y por encima del eje OT , se tiene: sepresentan nodos y estabilidad asintótica, en la región de la izquierda; se presentan nodos e inestabilidaden la región de la derecha. Véanse las Figuras.
DESTABILIDADASINTÓTICAESTABILIDADTema 6. Estabilidad en sistemas de ecuaciones diferenciales. Ampliación de Matemáticas. Esp. Electrónica d del origen para el sistema OROPIMSNODOSTPUNTOS DE SILLANaturaleza del origen para el sistema lineal4Estabilidad mediante linealizaciónConsideremos el sistema autónomo(1), con un punto crítico en (x0 , y0 ), tal que las funciones F (x, y)¡ y G(x, y) sean de clase C 1 R2 . Entonces, aproximando z F (x, y) y z G(x, y) (cerca del punto(x0 , y0 )) por sus respectivos planos tangentes en dicho punto,F (x, y) F F(x0 , y0 ) · (x x0 ) (x0 , y0 ) · (y y0 ) x yG(x, y) G G(x0 , y0 ) · (x x0 ) (x0 , y0 ) · (y y0 ) x yµ¶podemos escribirF (x, y)G(x, y) Aµx x0y y0¶si (x, y) ' (x0 , y0 ),
Tema 6. Estabilidad en sistemas de ecuaciones diferenciales. Ampliación de Matemáticas. Esp. Electrónica Industrial.13donde A es la matriz jacobiana del campo (F (x, y), G(x, y))t en el punto (x0 , y0 ), es decir, F(x , y ) x 0 0 A G(x0 , y0 ) x F(x0 , y0 ) y . G(x0 , y0 ) yDe esta manera, podemos pensar que el sistema (1) se encuentra próximo al sistema linealµ¶µ¶ẋx x0 Aẏy y0(5)cuando (x, y) está cerca de (x0 , y0 ), y por consiguiente, es natural esperar que el comportamiento de lastrayectorias del sistema (1) cerca del punto crítico (x0 , y0 ) sea similar al de las trayectorias del sistemalinealizado (5).El proceso descrito con anterioridad se denomina linalización y nótese que el cambio de variable (2)sobre el sistema (5) transforma éste en el sistema linealµ¶µ¶ẋx A(6)ẏyque tiene al punto (0, 0) como punto de equilibrio.A continuación veremos que, en general, el punto de equilibrio (x0 , y0 ) del sistema autónomo (1)hereda la estabilidad, y en algunos casos la naturaleza, del punto de equilibrio (x0 , y0 ) para el sistemalineal (5), es decir, la estabilidad del (0, 0) para el sistema lineal (6).En primer lugar caracterizamos la propiedad de punto crítico aislado para el sistema (1) a partir deesta misma propiedad para el punto crítico (0, 0) del sistema lineal (6).Proposición 4.1 Si el punto crítico (0, 0) del sistema lineal (6) es aislado (es decir, si det (A) 6 0),entonces el punto crítico (x0 , y0 ) del sistema (1) es aislado.Teorema 4.1 Teorema de Linealización de Liapunov y Poincaré.1. El punto crítico (x0 , y0 ) del sistema (1 )es asintóticamente estable si y sólo si todos los autovaloresde la matriz A poseen parte real negativa (esto es, si el punto crítico (0, 0) del sistema (6) esasintóticamente estable).2. El punto crítico (x0 , y0 ) del sistema (1) es inestable si y sólo si la matriz A del sistema posee unautovalor con parte real positiva (es decir, el punto crítico (0, 0) es inestable para el sistema (6).Más aún, si los autovalores de A son distintos entre sí y distintos de cero se puede decir lo siguiente:1. Si λ1 λ2 0, entonces (x0 , y0 ) es un nodo asintóticamente estable.2. Si λ1 λ2 0, entonces (x0 , y0 ) es un nodo inestable.3. Si λ1 0 λ2 , entonces (x0 , y0 ) es un punto de silla.4. Si λ1 no es real y Re(λ1 ) 0, entonces (x0 , y0 ) es un foco asintóticamente estable.5. Si λ1 no es real y Re(λ1 ) 0, entonces (x0 , y0 ) es un foco inestable.Cuando el punto (0, 0) del sistema lineal (6) es estable, pero no asintóticamente estable, es decir,cuando la matriz jacobiana A posee un par de autovalores complejos conjugados con parte real nula, ocuando det(A) 0 y A no posee un autovalor real positivo, el proceso de linealización no proporciona
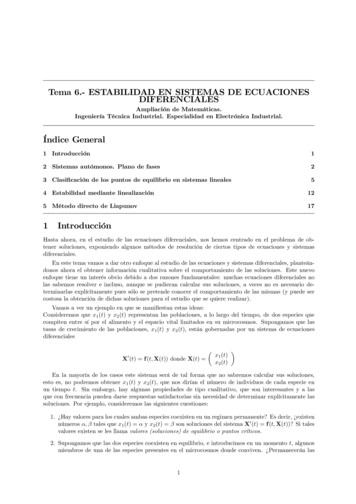
Tema 6. Estabilidad en sistemas de ecuaciones diferenciales. Ampliación de Matemáticas. Esp. Electrónica Industrial.14información sobre la estabilidad del punto crítico (x0 , y0 ) para el sistema (1). En efecto, consideremos elsistema¡ ½ 0x y ¡µ x2 y 2 xdonde µ R.(7)y 0 x µ x2 y 2 yEl punto (0, 0) es el único punto de equilibrio para el sistema (7) y el sistema linealizado en dicho puntoes½ 0x y(8)y0 xde donde, (0, 0) es un punto de equilibrio estable para el sistema (8).Si estudiamos el sistema (7), introduciendo el cambio a coordenadas polaresx r cos θ,y r sen θr2 x2 y 2 ,θ arctgtenemosyxpor lo quer0 r xx0 yy 0 ,θ0 y 0 x x0 yr2y el sistema (7) se tranforma en½r0 µr3θ0 1Por consiguiente: Si µ 0, entonces r es decreciente y tiende a cero cuando t , por lo que el punto (0, 0) esasintóticamente estable para el sistema (7). Si µ 0, entonces r es creciente y tiende a cuando t . Por tanto, el punto (0, 0) es unpunto de equilibrio inestable para el sistema (7). Por último, si µ 0, entonces (0, 0) es estable (centro) para el sistema (7), ya que este sistemacoincide con el sistema lineal (8).El plano de fases del sistema (7) para los distintos valores de µ puede contemplarse en las Figuras9—11.Ejemplo 4.1 Determinar la estabilidad del punto crítico (0, 0) para el sistema½ 0x x y 3x2 yy 0 2x 4y y sen xSolución: Puesto que el sistema linealizado correspondiente es½ 0x x yy 0 2x 4y(9)(10)entonces la traza y el determinante de la matriz de coeficientes vienen dados por T 5 y D 2. Estoasegura que el origen para el sistema linealizado es asintóticamente estable (T 0, D 0). Por tanto,podemos aplicar el Teorema 4.1, y concluir que el punto (0, 0) es, para el sistema no lineal, asintóticamenteestable. Los diagramas de fase para ambos sistemas se muestran en las Figuras 12 y 13.
Tema 6. Estabilidad en sistemas de ecuaciones diferenciales. Ampliación de Matemáticas. Esp. Electrónica Industrial.15Figura 7: Plano de fases del sistema (7) para µ 0.Figura 8: Plano de fases del sistema (7) para µ 0.Figura 9: Plano de fases del sistema (7) para µ 0.
Tema 6. Estabilidad en sistemas de ecuaciones diferenciales. Ampliación de Matemáticas. Esp. Electrónica Industrial.16Figura 10: Retrato de fases del sistema no lineal (9).Figura 11: Retrato de fases del sistema
Tema 6. Estabilidad en sistemas de ecuaciones diferenciales. Ampliación de Matemáticas. Esp. Electrónica Industrial.3 es un punto crítico o un equilibrio del sistema. Cada punto del plano de las fases o bien es un punto crítico o bien por él pasa una única trayectoria.