Transcription
Grado en Ingeniería Electrónica IndustrialExperiencia docente en laimpartición de un cursode modelado y control de sistemascontinuos usando herramientasinteractivasUniversidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
21.2.3.4.5.6.7.8.9.Asignatura “Modelado y control de sistemas continuos”Bibliografía y herramientas interactivasMetodología docente y curso virtual de apoyoPrograma de ejerciciosPrograma de prácticasEvaluaciónEncuesta de la asignaturaResultados de la asignaturaConclusionesUniversidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
3MecánicaQuímicaindustrialElectrónica industrialy AutomáticaAutomatización industrial (2º curso)Modelado y control de sistemas continuos (3º)Control por computador (3º)Informática industrial (3º)Técnicas de control industrial (4º)Robótica (4º)Universidadde AlmeríaControl einstrumentación deprocesos químicos (4º)Área de Ingeniería de Sistemas y AutomáticaDepartamento de Lenguajes y Computación
41.- Entender el concepto de sistema dinámico, siendo capaz de modelar ysimular su comportamiento.2.- Adquirir la capacidad de análisis de la respuesta temporal y frecuencial deun sistema dinámico, tanto en términos de estabilidad como en términos derendimiento.3.- Adquirir las capacidades de análisis de sistemas realimentados y de diseñode controladores.Se utilizarán herramientas matemáticas conocidas por el alumno:- Variable compleja- Ecuaciones diferenciales lineales ordinarias- Transformada de LaplaceUniversidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
5Bloque 1. Análisis de sistemas dinámicos en lazo abiertoTema 1. Fundamentos de los sistemas dinámicosTema 2. Representación de sistemasTema 3. Modelado y simulaciónTema 4. Sistemas dinámicos lineales en tiempo continuoPráctica 1. Modelado y simulación de sistemas físicos. Motor de corriente continua.Práctica 2. Identificación experimental de modelos en el tiempo y en la frecuencia.Bloque 2. Diseño de sistemas de control en lazo cerradoTema 5. Análisis de sistemas realimentadosTema 6. Diseño de controladoresPráctica 3. Análisis de errores en estado estacionario y estabilidad con realimentaciónunitariaPráctica 4. Control del motor de corriente continuaUniversidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
6Objetivo del libroExplicardeformainteractivaconceptosbásicos de un curso deintroducción al controlautomático y facilitar alreciénllegadosuaprendizajeUniversidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
7Uso en sesiones de teoría, en prácticas y para el trabajo autónomo de los estudiantesUniversidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
8PÁGINA WEB: http://www.pearson.es/fichas interactivasPremio PRODEL al mejor trabajo del grupo de Educación en Automática en lasJornadas de Automática 2012Universidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
9Bibliografía complementaria K. J. Åstrom, R. M. Murray. Feedback systems: an introduction for scientists andengineers. Princeton University Press, 2008. ISBN: 978-84-481-6640-3. K. J. Åstrom, T. Hägglund. Control PID avanzado. Pearson-Prentice Hall 2009. ISBN:978-84-8322-511-0. P. Bolzern, R. Scattolini, N. Schiavoni. Fundamentos de control automático, 3ªEdición, McGraw-Hill, 2009. ISBN: 978-84-481-6640-3. R. C. Dorf, R. H. Bishop. Sistemas de control moderno, 10ª Edición, Prentice Hall,2005. ISBN: 84-205-4401-9. G. F. Franklin, J. D. Powell, A. Emami-Naeini. Feedback control of dynamic systems,6ª Edición, Prentice Hall, 2010. ISBN: 978-0-13-500150-9. B. C. Kuo, Sistemas control automático , 7ª Edición, Prentice Hall, 1996. ISBN: 968880-723-0. K. Ogata. Ingeniería de control moderna, 5º Edición, Pearson Educación S.A., 2010.ISBN: 978-84-8322-660-5.Universidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
10 Sesiones de teoría para todo el grupo de alumnos en las queel profesor explicará los contenidos teóricos fundamentalesde cada tema y donde se valorará la participación delalumnado. Además durante el transcurso de cada bloquehay un conjunto de ejercicios que permiten al alumno/amejorar la destreza en el uso de los conceptos. La parte práctica se organiza en sesiones para cada grupo dealumnos, desarrolladas en paralelo a la parte teórica y conuna adecuada sincronización, de forma que el alumnadopueda poner en práctica los conocimientos teóricosadquiridos y donde se pretenderá un comportamiento lomás autónomo posible.Universidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
11Universidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
12Universidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
13Universidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
14Universidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
15Universidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
16Universidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
17Universidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
18Bloque I . Lazo abierto.- 34 ejercicios a realizar haciendo uso de herramientas interactivasBloque II . Lazo cerrado.- 8 ejercicios a realizar haciendo uso de herramientas interactivasUniversidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
19Práctica 1. Modelado y simulación de sistemas físicos. Motor decorriente adde AlmeríaObtención de modelos dinámicos1. Modelado de sistemas continuos: ecuaciones diferenciales, funciones detransferencia, representación en el espacio de estados.2. Linealización de sistemas no lineales. Elementos no lineales.3. Simulación de ecuaciones diferenciales con Simulink.4. Simulación usando funciones de transferencia con Simulink. Diagramas de bloques.5. Modelado y simulación de un circuito eléctrico.6. Modelado y simulación de un sistema mecánico.7. Modelado y simulación de un sistema hidráulico.8. Modelado y simulación de un sistema térmico.9. Obtención de la función de transferencia del motor de corriente continua consalida en velocidad angular.10. Obtención de la función de transferencia del motor de corriente continua consalida en posición angular. Simulación con Simulink.11. Modelo del motor de corriente continua en espacio de estados.10 horas – 5 sesionesÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
20Práctica 1. Modelado y simulación de sistemas físicos. Motor decorriente continua.ContextoTemporizaciónUniversidadde AlmeríaObtención de modelos dinámicos10 horas – 5 sesionesÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
21Práctica 1. Modelado y simulación de sistemas físicos. Motor decorriente continua.ContextoTemporizaciónUniversidadde AlmeríaObtención de modelos dinámicos10 horas – 5 sesionesÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
22Práctica 1. Modelado y simulación de sistemas físicos. Motor decorriente continua.ContextoTemporizaciónUniversidadde AlmeríaObtención de modelos dinámicos10 horas – 5 sesionesÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
23Práctica 1. Modelado y simulación de sistemas físicos. Motor decorriente continua.ContextoObtención de modelos dinámicosCuartopisoTemporizaciónUniversidadde Almería10 horas – 5 sesionesÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
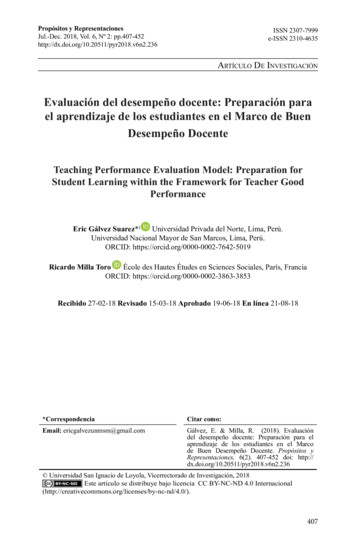
24Práctica 2. Identificación experimental de modelos en el dominiodel tiempo y el dominio de la frecuenciaContextoContenidosObtención de modelos dinámicos a partir de datos1.2.3.4.5.6.7.8.TemporizaciónUniversidadde AlmeríaObtención de modelos usando el método de la curva de reacción en torno adistintos puntos de operación.Modelo a partir de datos experimentales del motor de corriente continua:velocidad angular (como sistema de 1er orden y como sistema de 2º orden).Modelo a partir de datos experimentales del motor de corriente continua:posición angular.Modelo nominal.Comparación de la respuesta del modelo obtenido a partir de datosexperimentales con el modelo teórico en simulación.Obtención experimental del diagrama de Bode del motor de corriente continuausando la respuesta en frecuencia (entradas senoidales en régimen permanente).Diagrama de Nyquist del motor de corriente continua tomando como salida lavelocidad angular.Comparación con los modelos obtenidos previamente en la práctica 1 y 2.6 horas – 3 sesionesÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
25Práctica 2. Identificación experimental de modelos en el dominiodel tiempo y el dominio de la frecuencia4entrada y velocidad angular (V)3.532.521.510.50024681012tiempo (s)14161820magnitud G [dB]50-5-10-15-210-101010110frecuencia [rad/s]desfase G [º]0-50-100-150-200-210-101010110frecuencia [rad/s]Universidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
26Práctica 2. Identificación experimental de modelos en el dominiodel tiempo y el dominio de la frecuenciaTemporizaciónUniversidadde Almería6 horas – 3 sesionesÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
27Práctica 3. Análisis de errores en estado estacionario yestabilidad con realimentación dde AlmeríaAnálisis de sistemas realimentadosSuponiendo realimentación unitaria y un controlador proporcional:1. Análisis de errores en régimen estacionario a entrada en escalón, rampa yparábola del motor de CC (velocidad y posición angular). Comparación conherramienta interactiva.2. Análisis en el lugar de las raíces usando la herramienta interactiva asociada ylos modelos del motor en velocidad y posición angular .3. Análisis de la respuesta temporal del motor real en lazo cerrado en función delos valores de la constante proporcional del controlador y comparación con laubicación teórica de las raíces del lazo cerrado en el lugar de las raíces. Relacióncon las especificaciones de rendimiento.4. Análisis de estabilidad en lazo cerrado del motor CC (velocidad y posición)usando la herramienta interactiva asociada al criterio de estabilidad de Nyquist.5. Usando la herramienta interactiva asociada a los márgenes de estabilidadrelativos, analizar la estabilidad relativa en lazo cerrado del motor de corrientecontinua controlado tanto en velocidad como en posición angular.6 horas – 3 sesionesÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
28Salida32.521.510.5001234tiempo (s)567u (verde), u1 (rojo), u2 (celeste), u3 (magenta), u4 (naranja) (V)r (azul), y (verde), y1 (rojo), y2 (celeste), y3 (magenta), y4 (naranja) (V)Práctica 3. Análisis de errores en estado estacionario yestabilidad con realimentación unitariaVelocidad angularSeñal de control54.543.532.521.510.5001234tiempo (s)567Universidadde empo (s)78910u (verde), u1 (rojo), u2 (celeste), u3 (magenta), u4 (naranja) (V)r (azul), y (verde), y1 (rojo), y2 (celeste), y3 (magenta), y4 (naranja) (V)Posición angularSeñal de control3.532.521.510.500123456tiempo (s)78910Área de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
29Práctica 3. Análisis de errores en estado estacionario yestabilidad con realimentación unitariaUniversidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
30Práctica 3. Análisis de errores en estado estacionario yestabilidad con realimentación unitariaUniversidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
31Práctica 3. Análisis de errores en estado estacionario yestabilidad con realimentación unitariaUniversidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
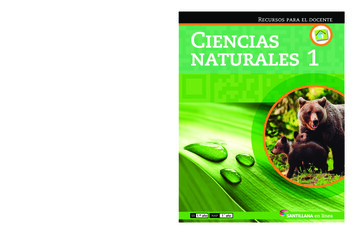
32Práctica 4. Control del motor de corriente continuaContextoContenidosDiseño de sistemas de control1.2.3.4.TemporizaciónUniversidadde AlmeríaControl de la velocidad angular del motor de corriente continua haciendo usodel método de cancelación de polos. Comparación con los resultados que seobtienen en simulación usando la herramienta interactiva asociada a esemétodo.Control de la velocidad angular del motor de corriente continua haciendo usodel método de asignación de polos. Comparación con los resultados que seobtienen en simulación usando la herramienta interactiva asociada a esemétodo.Control de la posición angular del motor de corriente continua haciendo uso delmétodo de asignación de polos.Diseño de controladores de avance y retraso de fase diseñados mediantemétodos frecuenciales y basados en el lugar de las raíces. Comparación con losresultados que se obtienen en simulación usando las herramientas interactivasasociadas a esos métodos.8 horas – 4 sesionesÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
33Práctica 4. Control del motor de corriente continuaSIMULACIÓNIMPLEMENTACIÓNDISEÑO ANALÍTICOVALIDACIÓN CON HERRAMIENTAS INTERACTIVASUniversidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
3421.510.500Universidadde Almería510tiempo (s)15u (verde), u1 (rojo), u2 (celeste), u3 (magenta), u4 (naranja) (V)Salida2.5u (verde), u1 (rojo), u2 (celeste), u3 (magenta), u4 (naranja) (V)r (azul), y (verde), y1 (rojo), y2 (celeste), y3 (magenta), y4 (naranja) (V)r (azul), y (verde), y1 (rojo), y2 (celeste), y3 (magenta), y4 (naranja) (V)Práctica 4. Control del motor de corriente continuaSeñal de control43.532.521.510.500510tiempo (s)15Salida2.521.510.500123456tiempo (s)78910Señal de control54.543.532.521.510.500123456tiempo (s)78910Área de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
35Forma de evaluacionEvaluación continuaInstrumentos de evaluación Relaciones de ejercicios a entregar (obligatorias e individual) Informes de las prácticas (obligatorios por grupos de dos alumnos) Estudios previos de las prácticas (obligatorios por grupos de dos alumnos) Examen de la asignatura (obligatorio e individual) Participación activa del alumno en otras actividades como foros de discusión,asistencia a clases, visitas técnicas y envío de ejercicios en los plazospredeterminadosCalificación 0.15*Problemas(C2.1) 0.2*Prácticas(C3) 0.6*Examen(C2.2) 0.05*Participación (C1)Universidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
36Competencias genéricas a evaluarLa Universidad de Almería estableció 10 competencias transversales1. Habilidad en el uso de las TIC (nivel 2 y 3)2. Capacidad para resolver problemas (nivel 3)3.4.5.6.7.8.9.10.Comunicación oral y escrita en la propia lenguaCapacidad de crítica y autocríticaTrabajo en equipoConocimiento de una segunda lenguaCompromiso éticoCapacidad para aprender a trabajar de forma autónomaCompetencia social y ciudadanía globalCompetencia informacionalUniversidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
37Competencia genérica a evaluarCapacidad para resolver problemas (nivel 3) Comprender el problema que se planteaIdentificar los objetivos de aprendizajeDominar la metodología o procedimiento con el que abordar cada problemaplanteadoResolver el problemaCompetencia genérica a evaluarHabilidad en el uso de las TIC (niveles 2 y 3) Manejar Sistemas operativos y aplicaciones informáticas, en concreto, utilizandodiferentes programas de utilidades de análisis y diseño de sistemas de control(Matlab/Simulink, Sysquake, ). Manejar paquetes ofimáticosUniversidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
38Universidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
39Universidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
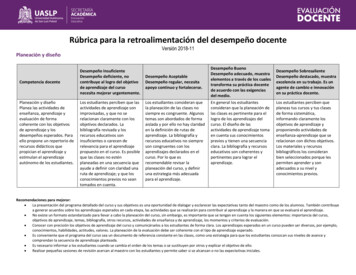
401; 4%1; 4%Matrículas8; 35%5; 22%SobresalientesNotablesAprobadosSuspensos1; 4%No presentados7; 31%Universidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
4112108B16B242012Universidadde Almería34567891011121314151617181920Área de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
4212108P1P26P3P442012Universidadde Almería34567891011121314151617181920Área de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
43Las herramientas interactivas han demostrado ser valiosas en distintos ámbitos: Teoría: Ayudan al profesor a explicar visualmente conceptos que a veces son complejosdesde el punto de vista matemático. Ayudan a los alumnos a practicar en casa y visualizar lo que estudian. Ejercicios: Permiten realizar ejercicios interaccionando con el sistema objeto deestudio. Nuestra experiencia demuestra que son muy útiles los ejercicios donde elalumno debe realizar una combinación de cálculos propios y uso de la herramienta. Elpeligro de los ejercicios donde sólo se usa la herramienta es que puede haber alumnosque lo resuelvan por prueba y error sin comprender bien la teoría subyacente. Prácticas: Las herramientas interactivas son muy útiles como herramientas de diseño yde comprobación de los cálculos hechos por los alumnos. Retos: Aspectos relacionados con el balanceo de la carga de trabajo (mala estimacióndel tiempo requerido para el desarrollo de prácticas y ejercicios) y con la correcciónautomática de ejercicios. Necesarias más sesiones presenciales.Universidadde AlmeríaÁrea de Ingeniería de Sistemas y AutomáticaDepartamento de Informática
Diseño de sistemas de control en lazo cerrado Tema 5. Análisis de sistemas realimentados Tema 6. Diseño de controladores Práctica 3. Análisis de errores en estado estacionario y estabilidad con realimentación . B. C. Kuo, Sistemas control automático , 7ª Edición, Prentice Hall, 1996. ISBN: 968-