Transcription
INTERNATIONAL JOURNAL OF INNOVATIVE TECHNOLOGY & CREATIVE ENGINEERING (ISSN:2045-8711)VOL.1 NO.1 JANUARY 2011GPS Tracking Simulation by Path ReplayingG. Rajendran#1, Dr. M. Arthanari#2 , M. Sivakumar#3#1Assistant Professor of Computer Science,Government Arts College (Autonomous), Salem-636007,India.#2Director, Bharathidasan School of Computer Applications,Ellispettai-638116, Tamilnadu, India.#3Doctoral Research Scholar, Anna University, Coimbatore, Tamilnadu, India.Abstract—GPS (Global Positioning System) has avariety of applications among which real-time trackingfinds significance in day-to-day life. GPS tracking isdefined as the measurement of object position andorientation in a given coordinate system using GPSdata at different points of time. GPS data are collectedfrom GPS receivers attached to the moving objects andthese data are used for tracking objects in real-time.Researchers who work in GPS tracking need GPSdatabases which contain huge volume of GPS datagenerated by hundreds of GPS receivers. But thepresently available GPS databases are owned byprivate players and are not available for use by theresearchers. This work is an attempt to generate adatabase of GPS data which can be used by theresearchers to develop and test GPS applications. Theapproach consists of three successive steps:Collecting floating car data (FCD) of each path once ina log file; refining the log file; and replaying multipleinstances of several log files simultaneously afterreplacing some old values with new values to simulateGPS tracking. Thus a single path tracked previouslycan be used to produce a tracking simulation of anumber of moving objects by path replaying and eachand every execution of the simulation generates a setof new GPS tracking data of several moving objects.These data are stored in a database and can be usedas sample data for developing and testing GPSapplications.Keywords: GPS receiver, GPS simulation, GPS data,Real time tracking.I.INTRODUCTIONThe applications of GPS tracking in real time havefound its place in almost all walks of life, for instance,navigation, map making, land surveying, fishing andtrekking. GPS has many technical and economicalbenefits to almost all industries and nowadays manycompanies are developing GPS [1] enabledapplications and systems. More research is beingcarried out in this domain as GPS has the uniquecapability of locating any moving object over theearth in terms of latitude, longitude and altitude withhigh accuracy. 20Private and Government owned transport, shippingand cargo companies have started using GPS totrack their vehicles. They maintain a trackingdatabase of their own vehicles and they do not wantto share this database with anybody else because ofthe fear that these data may be used by theircompetitors. But researchers need GPS databasesgenerated by hundreds of GPS receivers. Thisintroduces a new problem domain of non-availabilityof sample data to developandtestGPSapplications. Hence the need for a GPS trackingsimulator is vital to generate GPS databases. Such asimulator will greatly reduce the expenses inresearch area and enable us to have moreresearches carried out in the allocated budgets.This paper presents a GPS tracking simulationprocess which produces a database of GPS trackingdata. GPS simulation has already been carried out bysome of the researchers, but with limitations likehardware dependency, involvement of certain cost,complexity, lack of provision for GPS databasecreation and lack of provision for integration of digitalmaps. These limitations have been addressed in thiswork. The remainder of this paper is organised asfollows. Section 2 of this paper describes the trackingof moving objects using GPS. Previous work in thisarea is discussed in Section 3. In Section 4, thesimulation scenario is introduced. The results of thesimulation along with a comparison of output dataitems with real-time data are dealt in Section 5. Thework is concluded and the possible improvementsare discussed in Section 6. The path replayingsimulator has been designed using Matlab 7.6.II.TRACKING USING GPSA. A. Global Positioning SystemThere are many thousands of civil users of GPSsystem world-wide. GPS is a Satellite NavigationSystem funded, controlled and operated by the U. S.Department of Defense [2, 3]. The GPS systemconsists of three segments viz., satellites thattransmit the position information, the ground stations
INTERNATIONAL JOURNAL OF INNOVATIVE TECHNOLOGY & CREATIVE ENGINEERING (ISSN:2045-8711)VOL.1 NO.1 JANUARY 2011that are used to control the satellites, and finally thereis the receiver that computes its location anywhere inthe world based on information it gets from thesatellites [4].The satellite segment consists of a minimum of 21satellites and 3 working spares. The GPS satellitesbroadcasts two signals, PPS (Precise PositioningService) which is available for use by military andgovernment and SPS (Standard Positioning Service)which is available for use by public [5]. The ControlSegment consists of a system of control stationslocated around the world. The Master Control facilityis located in Colorado. These stations measuresignals from the satellites which are incorporated intoorbital models which in turn compute precise orbitaldata and satellites clock corrections for each andevery satellite. The Master Control station uploadsephemeris and clock data to the satellites. Thesatellites then send subsets of the orbital ephemerisdata to GPS receivers over radio signals. TheReceiver Segment consists of GPS receivers whichare used for navigation, positioning, timedissemination and other applications. A GPS receiverreceives signals from more satellites than are actuallyneeded for a position fix. The reason for this is that ifone satellite becomes unavailable, the receiverknows exactly where to find the best possiblereplacement. Three satellites are required for twodimensional positioning and four satellites arerequired for three dimensional positioning. Twodimensional positioning reports position only in termsof latitude and longitude whereas three dimensionalpositioning reports position in terms of altitude aswell. In general, a GPS receiver can provide positioninformation with an error of less than 10 meters, andvelocity information with an error of less than 5meters per second.Many of the tracking systems combine GPS, GSMtechnologies. In less than ten years since the firstGSM network was commercially launched, it becamethe world's leading and fastest growing mobilestandard, spanning over 200 countries. There is atleast one cell tower in every 900m-1000m radius inthe high traffic regions (city limits) and in the lowtraffic regions (high ways) a single cell tower cancover a radius up to 10 km. The operation of GPStracking is explained in Fig. 1. The GPS receivercaptures position data from the satellites, computesthe position of the object, say, a vehicle, and sendsthis information to a central base station, using SMS(Short Message Service) or GPRS(General PacketRadio Service). If the optional storage module isinstalled, location data can even be stored when thevehicle is out of range of the cellular operator andretrieved later. GSM technology is used to transmitthis information which in turn is collected by theserver at the base station. The geographical positionof the object can be displayed at the base stationusing a suitable application.B. B. NMEA ciation) has developed a specification thatdefines the interface between various pieces ofmarine electronic equipments. The NMEA standardpermits marine electronics to send information tocomputers and to other marine equipments [6] inpredefined formats. GPS receiver communication isdefined with NMEA specification. Most computerprograms that provide real time position informationrecognize data that are in NMEA format whichincludes the latitude, longitude, velocity and timecomputed by the GPS receiver. In NMEAspecification system, data is sent as a line of text,called a sentence which is totally self contained andindependent from other sentences. The data iscontained within this single line and the data itemsare separated by commas. The commas act asterminators for the sentences and the programs thatread the data should only use the commas todetermine the end of a data item.The GPS receivers produce GPS data in the formof standard NMEA sentences. The most importantNMEA sentences include the GPGGA whichprovides the current fix data, the GPRMC whichprovides the minimum GPS sentences information,and the GPGSA which provides the Satellite statusdata. The GPRMC sentence is used for the trackingof moving objects.Fig. 1 GPS tracking with the help of a GPS receiver fixed in amoving object. 21
INTERNATIONAL JOURNAL OF INNOVATIVE TECHNOLOGY & CREATIVE ENGINEERING (ISSN:2045-8711)VOL.1 NO.1 JANUARY 2011III.PREVIOUS W ORKGPS simulators help the researchers to carry outtheir research work with minimal cost and withaccurate data which they need. Though some workhas been done in this area, more GPS simulators arebeing developed to suit the custom needs of thehour.A GPS device emulator [6] namely, the GPSGenerator PRO, has been designed for providingassistance in developing, testing and debuggingprograms and equipment working with the NMEA0183 protocol. This emulator generates NMEAmessages from different data inputs. It can operate in2 modes: 1)User select map, start point, heading,speed; 2)User select NMEA log file. The user canchange speed and heading during simulation. Thegenerated NMEA sentences can be used by othermapping software. But buying this software involvescost.A device for generating NMEA sequences fortesting embedded GPS reception firmware andhardware is described by Sinivee V [7]. This workdescribes a prototype GPS data simulator designedand built in Department of Physics of TallinnUniversity of Technology, Estonia. Device can workin standalone mode and also in conjunction withcontrol software. Configuration program can be usedto generate test strings without tester hardware aswell. First version of the device was limited togenerating only one NMEA message and enabledsimulation of communication errors. Later versionswere developed to a more universal device withcontrol via a GUI running on an ordinary PC. Butthere is no option provided in this software to create adatabase of NMEA sentences. Hardware dependentGPS simulators [1, 8] are also available and theyoperate by generating pseudo GPS signals.researchers to develop and test GPS applications.This generator can be used not only by softwaredevelopers, but also by users, who want to learnnavigation software before buying GPS receiver. Thissystem generated random directions, but not basedon the existing routes available on ground.Thus a few number of GPS tracking simulators areavailable but with some limitations. Mostly thesesimulators involve some cost and hardwaredependent. Some simulators suffer from lack ofsupport of customized digital maps. Some of thegenerators require keyboard or mouse control forpath creation. In some generators, there is noprovision for database creation. The GPS trackingsimulator proposed in this work addresses theseproblems.IV.MODELLING DYNAMIC ENVIRONMENT OF MOVINGOBJECTS BY PATH REPLAYINGThe dynamic environment of moving objects ismodelled using the following steps.C.D.E.Collecting Floating Car GPS data in a log fileLog File Pre-processingReplaying multiple instances of several log file.F. A. Collecting Floating Car GPS data in a log fileNowadays, the main research focus in thecommunity of Intelligent Transport Systems (ITS) ishow to acquire real-time and dynamic transportationinformation. This information can be applied in thetransportation area like vehicle tracking, navigation,road guidance and so on. GPS is one such systemwhich is used to provide real time information onmoving objects.A keyboard or mouse controlled NMEA sentencegenerator, Virace GPS Simulator [9] V0.01, canproduce 3 COM port outputs. This simulator supportsNMEA sentences like GPRMC, GPGGA, GPGSAand GPGSV. A lot of defined keys for steering andspeed are available in this simulator. It supports threedisplay and input formats of latitude and longitude.The disadvantage of using this is that it does notsupport GPS track replaying.A work in this area has recently been done by theauthors [10] to generate a sequence of NMEAsentences which in turn are used to simulate a GPStracking environment. The generated data weresimilar to the data generated in real time by a GPSreceiver and this simulator was used to create adatabase of sample GPS data which can be used by 22Fig. 2 A moving vehicle (Floating car) fixed with a GPS receiver
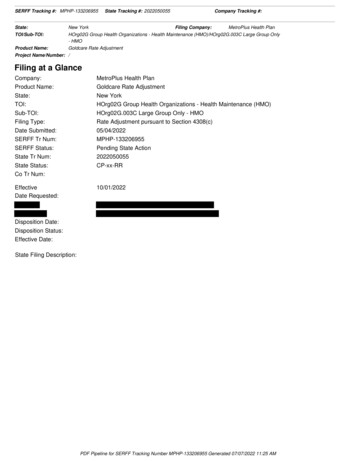
INTERNATIONAL JOURNAL OF INNOVATIVE TECHNOLOGY & CREATIVE ENGINEERING (ISSN:2045-8711)VOL.1 NO.1 JANUARY 2011The Floating Car (Probe Car) technique is one ofthe key technologies adopted by the ITS to get thetraffic information in recent years [11]. Its basicprinciple is to periodically record the location,direction, date, time and speed information of thetraveling vehicle from a moving vehicle with the dataof the GPS as shown in Fig 2. The information can beprocessed by the related computing model andalgorithm so that the floating car data can beassociated with the city road in real time [12]. Thisdata can also be used as a source of data forcreating research and commercial applications onvehicle tracking and road guidance systems.Mostly, the GPS receivers generate GPGGA, GPGSA, GPRMC, GPVTG and GPGSVsentences at a regular time interval. A sample list ofNMEA sentences produced by the GPS receiver andstored in a log file when travelled in a road is given inFig. 3.07742.4325,E : Longitude 77 deg 42.4325' E31.6: Speed over the ground in knots317.52: Course over the ground140510: Date – 14th of May 2010A: Autonomous mode*62: The checksum data, always begins with *TABLE I GPRMC DATA FORMATData ItemG. B. Log File Pre-processingThe log file contains a number of different types ofsentences but the GPRMC (recommendedminimum sentence C) provides the essential GPSPVT (Position, Velocity and Time) data. All GPSreceivers output this sentence along with some othersentences. This data is used to locate moving objectsin terms of latitude and longitude. The moving object,if attached with a GPS receiver, can be located withthe help of this NMEA sentence. The GPRMC dataformat [13] is given in Table 1.An example of GPRMC NMEA sentence is given below: 17.52,140510,,,A*62Where GPRMC: Recommended Minimum sentenceC120642.206: Fix taken at 12:06:42.206 UTCA: Status A active or V Void.1118.4253,N : Latitude 11 deg 18.4253' N 23Description GPRMCRMC protocol header.UTC Time(CoordinatedUniversal Time)hhmmss.sssFix time to 1ms accuracy.StatusCharA Data Valid.V Data invalid.LatitudeFloatDegrees * 100 minutes.N/S IndicatorCharN north or S south.LongitudeFloatDegrees * 100 minutes.CharE East or W West.FloatSpeed Over Ground inknotsFloatCourse Over Ground inDegreesDateddmmyyCurrent DateMagneticVariationBlankNot UsedE/W IndicatorBlankNot UsedModeCharA AutonomousChecksum*xx2 DigitsMessageTerminator CR LF ASCII 13, ASCII 10E/W IndicatorFig. 3 Log file of floating car GPS data with GPGGA, GPGSA, GPRMC, GPVTG and GPGSV sentencesFormatMessage IDSpeedGroundoverCourseGroundoverHence the next step in the simulation process is torefine the log file by removing other sentences insuch a way that it contains the GPRMC sentencesonly as shown in Fig 4. This refined log file nowcontains the path of the probe car in terms of latitudeand longitude at an interval of one second persentence.In this context, replaying means picking the GPRMC sentences one by one from the log file andplotting the latitude and longitude position of theobject continuously in a map. During replay, new GPRMC strings are also generated for the movingobject as described below.For instance, consider the following sentence inrefined log file.
INTERNATIONAL JOURNAL OF INNOVATIVE TECHNOLOGY & CREATIVE ENGINEERING (ISSN:2045-8711)VOL.1 NO.1 JANUARY 2011 17.52,140510,,,A*62 86.94,240410,,,A*6FFig. 4 Refined Log file of GPRMC sentencesH. C. Replaying Multiple Instances of Several LogFilesDuring simulation, the values in the date and timefields in the above sentence are replaced with systemdate and time values as shown below. The microtime in the time field is left unaltered because of itsinsignificance. The check sum field is also leftunaltered as it is insignificant in simulation. Theremaining values are treated as current values forsimulation. So the newly generated sentence forsimulation will be 17.52,221110,,,A*62The different fields of the newly generatedsentence for the currently moving object can beextracted and stored in the database.V.GPS TRACKING SIMULATION RESULTSWonde-X series GPS receiver (ZX4125) was usedin order to produce log files once for each path. TheGPS receiver is fixed in a moving car and the NMEAsentence generated by it are stored in the log file in alaptop kept in the moving car. The log-file is thenrefined and replayed to produce simulation of onemoving object. During replay, new GPRMCsentences are produced out of the sentences presentin log file. For instance, the first ten sentencesoriginally available in the log file for a particular pathis given below. 24 07743.0879,E,0.00,286.94,240410,,,A*6C 86.94,240410,,,A*62 86.94,240410,,,A*63 86.94,240410,,,A*67 75.60,240410,,,A*6E 92.27,240410,,,A*6F 94.28,240410,,,A*6A 90.47,240410,,,A*60The new GPRMC sentences produced from theabove sentences during simulation are listed below. 86.94,251110,,,A*6F 86.94, 251110,,,A*6D 86.94, 251110,,,A*6C 86.94, 251110,,,A*62 86.94, 251110,,,A*63 86.94, 251110,,,A*67 75.60, 251110,,,A*6E 92.27, 251110,,,A*6F 94.28, 251110,,,A*6A 90.47, 251110,,,A*60
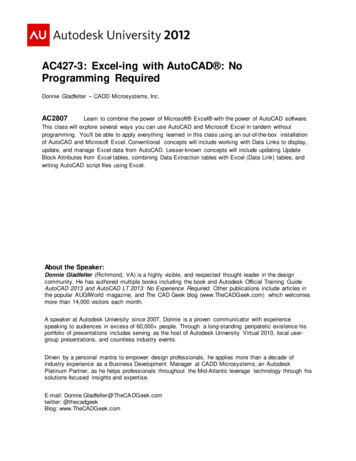
INTERNATIONAL JOURNAL OF INNOVATIVE TECHNOLOGY & CREATIVE ENGINEERING (ISSN:2045-8711)VOL.1 NO.1 JANUARY 2011Fig. 6 GPS database extracted from new GPRMC sentencesproduced by the simulatorFig. 5aThus each moving object is associated with new GPRMC sentences generated out of old sentencesavailable in refined log file. The digital map built in theearlier work [14] of authors is used to plot objects in a2D-plane. Multiple instances of the log-file arereplayed in parallel to get simulation of severalmoving objects as shown in Fig. 5a and 5b. Thevalues of fields in the new strings are stored in thedatabase as shown in Fig. 6. It can be noted that onlythe significant values in the GPRMC sentence isstored in the database along with an objectidentification field, say, vehicle number.Thus, it is observed that the new GPRMCsentences generated during simulation resemble withthe sentences generated by actual tracking. Besides,a replay of multiple instances of the previouslytracked path produces a GPS tracking simulation ofmoving objects on ground. The significant values arestored in the GPS database.VI.CONCLUSION AND FUTURE WORKThis paper introduces a GPS tracking simulationprocess which is used to simulate a number ofmoving objects by path replaying. It is found that thegenerated sentences are similar to the datagenerated in real time by a GPS receiver and theyare found to fit within standards. This GPS trackingsimulator has eliminated the limitations of theprevious work carried out in this area. The datagenerated by this software are used to create adatabase of sample GPS data which can be used byresearchers to develop and test GPS applications.This generator can also be used by softwaredevelopers as well as the novice users of GPS tolearn navigation software. At present this systemsimulates a fixed number of vehicles initially setduring the execution. In future, this work can beextended to simulate random number of movingvehicles at any point of time.ACKNOWLEDGMENTFig. 5bThe authors would like to thank Hashprompt LogisticsManagement India Pvt. Ltd., for their support toperform demonstration on GPS tracking using theirresources.Fig. 5a, 5b Moving objects simulated and plotted in the map atdifferent instances of time. 25
INTERNATIONAL JOURNAL OF INNOVATIVE TECHNOLOGY & CREATIVE ENGINEERING (ISSN:2045-8711)VOL.1 NO.1 JANUARY 2011 REFERENCES[1] Yun Young-sun, Park Sung-min and Kee Chang-don, "Test ofGBAS Integrity Monitoring System Using GPS Simulator,"Wuhan University Journal of Natural Sciences, vol. 8, no.2B,pp. 697-704, 2003.[2] Parkinson, B. W. and Spilker, J. J., "Global Positioning System:Theory and Applications," American Institute of Aeronautics andAstronautics, Washington, 1996.[3] Interface control document, Navstar GPS Space Segment(Navigation User Interfaces), 2000.[4] Asoke K Talukder and Roopa R Yavagal, "Mobile ComputingTechnology, Applications and Service Creation," Tata McGrawHill Publishing Company, 2005.[5] Goran M. Djuknic and Robert E. Richton., "Geolocation andAssisted GPS," Computer, vol. 34, no. 2, pp.123-125, 2001.[6] http://avangardo.com accessed on 10-10-2010.[7] Sinivee V., "Simple yet efficient NMEA sentence generator fortesting GPS reception firmware and hardware," NovelAlgorithms and Techniques in Telecommunications andNetworking, Springer Netherlands, pp.207-210, 2010.[8] Kou Yanhong, Yang Dongkai and Zhang Qishan, "GPS SatelliteSimulator Signal Estimation based on ANN," Journal ofElectronics(China), vol. 22 no.5, pp.458-464, sp?TOPIC ID 114933 accessed on 10-10-2010.[10] Rajendran G., Arthanari. M., and Sivakumar M. "A SimplifiedNMEA Sentence Generator for the Simulation of GPSTracking," Global Journal of Computer Science andTechnology, vol. 10, no. 14, November 2010.[11] X. W. Dai, M.A. Ferman, “A simulation evaluation of a realtime traffic information system using probe vehicles,” IEEEITSC, vol. 1, pp. 12-15, 2003.[12] R. Kuehne, R.P. Schaefer and J. Mikat, “New approaches fortraffic management in metropolitan areas,” IFAC CTS, 2003.[13] http://www.gpsinformation.org/dale/nmea.htm accessedon 10-10-2010.[14] Rajendran G., Arthanari. M., and Sivakumar M., "CustomizedDigital Road Map Building using Floating Car GPS Data,"International Journal of Computer Science and InformationSecurity, vol. 8, no. 3, pp. 21-29, June 2010. 26
Abstract—GPS (Global Positioning System) has a variety of applications among which real-time tracking finds significance in day-to-day life. GPS tracking is defined as the measurement of object position and orientation in a given coordinate system using GPS data at different points of time. GPS data are collected