Transcription
FANUC Robot R-2000iCFANUC CORPORATIONExport Control: Controlled (Related item No. ofForeign Exchange Order Attachment List of Japan: Non-controlled for item No. 2 to 15 ofForeign Exchange Order Attachment List of JapanJuly 29th 2014)A-97606-0293E 051
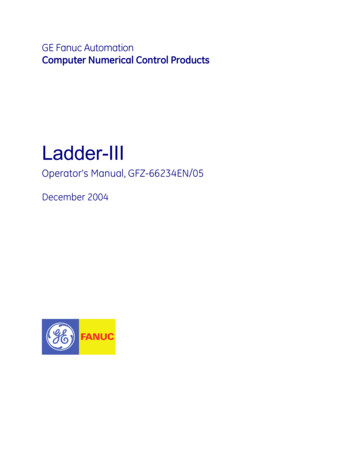
Full-model change of R-2000iBOver 70,000 units of previous model R-2000iB have been operating throughout the world since 2006.High reliability proven by past resultsMore convenient use due to slimmer bodyHigher productivity due to speeding upExtensive application due to enhanced wristload capabilityLess varieties of spare parts due to commonunits among main modelsNo need of spare entire cable assembly due tomodular configurationR-2000iCJuly 29th 2014New motor- Quick-release connector, - Enhanced waterproofA-97606-0293E 052
Line upStandardLong reachRack mountHeavy payloadCeiling mount165F125L165R210FCompact210R Various options for multiple applicationsJuly 29th 2014Spot weldingMaterialhandlingMotor coversStud weldingSevere dust &Liquid protectionCooling fanA-97606-0293E 053
Successor to R-2000iB0-0.06310.5O 160 h89O 80 H7 0.0300Identical mounting face with R-2000iB30 2- O 10 H730 0.0150depth10Succeeding compatibilityand high reliability30 30 Common compact wrist125 0.0510-M10 tapdepth16(Same dimension with R-2000iB/165F’s)O 125 30 3021530 30 Identical arm lengthwith R-2000iB8-O24 throughO 42 c'bore depth5(for fixing robot)Robot front230270540460J1-axisrotation center230460270540Identical installation with R-2000iBJuly 29th 2014A-97606-0293E 054
Slimmer bodyR-2000iB/210FR-2000iB/210FR-2000iC/210F284J3 axisOne-sided width -22%Total width -16%J2 axisOne-sided width -17%Total width tationradiusR620R581215More convenient useJuly 29th 2014A-97606-0293E 055
Speed up & Enhanced wrist load tioMax. loadat wrist [kg]210210-Reach [mm]26552655-J19512026% upJ29010517% upJ39511017% upJ412014017% upJ512014017% upJ619022016% upJ413331360Max. speed[deg/sec]Allowableload momentat wrist[Nm]Allowableload inertiaat wrist[kgm2]Mass [kg]July 29th 12401090210FAllowable distance of load gravity centerfrom mounting face [load:210kg]R-2000iB/210F5% up(Converted toactual capability)4% up4% upR-2000iC/210F5% up12% downA-97606-0293E 056
Speed up & Enhanced wrist load tioMax. loadat wrist [kg]165165-Reach [mm]26552655-J111013018% upJ21101155% upJ311012514% upJ415018020% upJ5150180J6220260J4921940Max. speed[deg/sec]Allowableload momentat wrist[Nm]Allowableload inertiaat wrist[kgm2]Mass [kg]July 29th . loadat wrist [kg]125125-Reach [mm]300531003% upJ111013018% upJ21101155% upJ311012514% upJ41701806% up20% upJ51701806% up18% 2J622.54078% up119011156% down2% upJ5921940J6461490J478.489165F,125L6% up14% upJ578.489J640.24614% up117010907% downMax. speed[deg/sec]Allowableload momentat wrist[Nm]Allowableload inertiaat wrist[kgm2]Mass [kg]21% up3% up22% upA-97606-0293E 057
Speed up & Enhanced wrist load tioMax. loadat wrist [kg]165165-Reach [mm]30953095-J11101155% upJ210011010% upJ311012514% upJ415018020% upJ5150180J6220260J4921940Max. speed[deg/sec]Allowableload momentat wrist[Nm]Allowableload inertiaat wrist[kgm2]Mass [kg]July 29th . loadat wrist [kg]2002103% upReach [mm]30953095-J19010517% upJ2859714% upJ39511016% upJ412014017% up20% upJ512014017% up18% upJ619022017% upJ4133313602% upJ5921940J6461490J478.489165R,210R6% up14% upJ578.489J640.24614% up148013707% downMax. speed[deg/sec]Allowableload momentat wrist[Nm]Allowableload inertiaat wrist[kgm2]Mass [kg]5% up(Converted toactual 678.4825% up1540137011% down4% up4% upA-97606-0293E 058
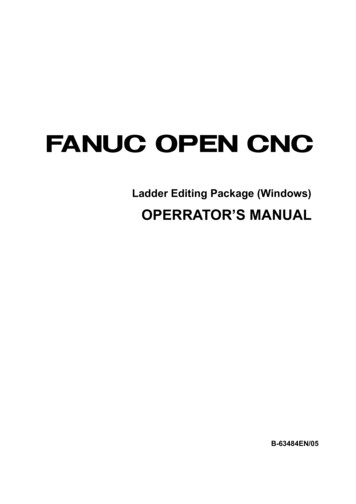
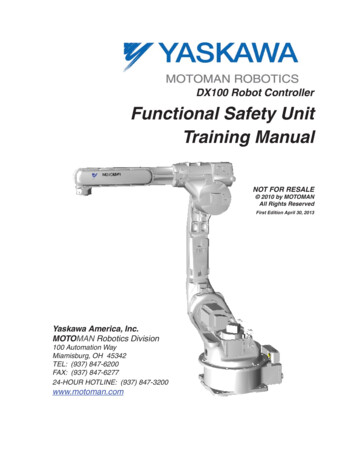
Speeding up on spot welding motion Drastically reducing cycle timeRobot Servo gun motion(Except pressuring time)ii50mm interval x 10 pointsAverage timeR-2000 B/210FR-2000 C/210Fwith R-30 Bwith R-30 B(Actual)(Actual)X (Back & Forth) direction0.485 [sec]0.402 [sec] 17%Y (Side to side) direction0.493 [sec]0.412 [sec] 16%Z (Up & Down) direction0.495 [sec]0.417 [sec] 16%iiTip distanceGun tip: 10mmFixed tip : 10mm50mm10 points Reducing cycle time depending on wrist loadBOX C yc le T im eAve. Time of Segment [sec]0.60iB Linear0.55iC LineariB Joint0.50Z-iC JointX-X 0.45Z 0.400July 29th 2014Y-70140Wrist Load [kg]210280YA-97606-0293E 059
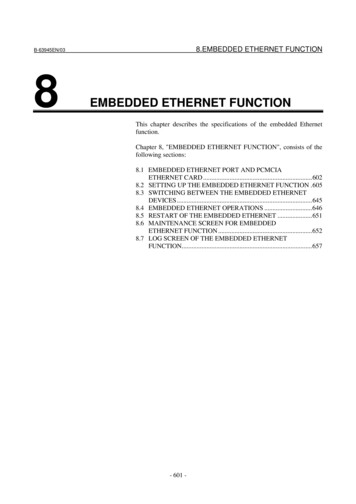
Common units among main modelsLess varieties of spare partsCommon units among main models Motors Wrist unit (including reducers) Mechanical inner cable Balancer unit210FMotorsWrist unitJuly 29th 2014165F125L210R165RSame configuration for 5 modelsCommon for 5 modelsMechanical inner cableCommon for3 modelsCommon for2 modelsBalancer unitCommon for3 modelsCommon for2 modelsA-97606-0293E 0510
Modular configuration of mechanical inner cableBasic cable unit (for driving 6 motors) and other optional one are separated.Available to individually replace or install each cable unit.No need of spareentire cable assemblyBasic cable unitOptional cable unitEntire cable assemblyBasic cable unitBasic cable unitOptional cable unitOptional cable unitJ1 connector plateSide of J2 armJuly 29th 2014A-97606-0293E 0511
New motor- Easy maintenance- High reliability*1 Quick-release connector*2 Enhanced waterproof by improved seals①Motor configurationAxisJ1J2J3J4J5J6Pulsecoder②July 29th T341A860-2060-T321A-97606-0293E 0512
Outline (Standard)210F,165F,125LR158 185v0v1280 (210F,165F)1730 (125L)1075225312497215J5-axisrotation center220 4163045 (210F,165F)3490 (125L)R-185v1919 (210F,165F)2364 (125L)July 29th 2014333418Motion rangeof J5-axisrotation center2655 (210F,165F)3100 (125L)370 (210F,165F)815 (125L)670796A-97606-0293E 0513
Outline (Standard)R210R,165R603220 416 215J5-axisrotation centerMotion rangeof J5-axisrotation center1117July 29th 20143095A-97606-0293E 0514
Solution arm (Option) Compact dressout including weld power cables and hoses Highly reliable durability of weld cables and hoses Unnecessary to check the interference due to optimized cable bundleWrist axis solution arm Ease of maintenance realizes shorter downtime to replace the unitAvailable taps around J3 axisto install equipmentsOptimized cable bundleprevent the interferencewith EOATMinimize the interference areaPrimary axis solution armJuly 29th 2014Note1. In case of primary axis solution arm is ordered, its motion range is changed from the standard one.2. In case of wrist axis solution arm is ordered, motion range restriction is applied to J4/J5/J6 axis.3. Wrist axis solution arm is available for standard reach, not for R-2000iC/125L.A-97606-0293E 0515
Outline (with solution arm)R58210F,165FRestriction to J4/J5/J6 axis(with wrist axis solution arm)1 185vJ4軸動作範囲J4 motion rangeJ4 210v0v-185vR497J2 J3 -75vJ2 J3 180vJ2 J3 -79vJ4 30vJ2 J3 motion rangeJ2 J3軸動作範囲3122153601280265457J4 -180vJ4 -210v1075J5-axisrotation centerJ6 205v3045225J6J6軸動作範囲motion rangeJ6 130v333796418J5 -115vJ5 115v844July 29th 2014J5 120vMotion rangeof J5-axisrotation centerJ6 -15v370670J5 -120v2655J5 motion rangeJ5軸動作範囲J6 -170vJ6 -205vA-97606-0293E 0516
Outline (with solution arm)R603210R,165RRestriction to J4/J5/J6 axis(with wrist axis solution arm)265457 185v-185vJ4軸動作範囲J4 motion range0vJ4 210vR859J2 J3 -75vJ2 J3 180vJ2 J3 -79vJ4 30vJ2 J3 motion rangeJ2 J3軸動作範囲J4 -180v17082975J4 -210vJ6J6軸動作範囲motion range7201075333225731J6 205v600J6 130vJ5 -115vJ5 115vJ5 -120v1280J5 120vJ6 -15vJ5 motion rangeJ5軸動作範囲3602151758J5-axisrotation centerMotion rangeof J5-axisrotation center393July 29th 2014J6 -170vJ6 -205v3095A-97606-0293E 0517
End effecter mounting face210F,165F,125L210R,165R0-0.06310.5O 80 H7 0.0300O 160 h8930 2- O 10 H730 0.0150depth1030 30 125 0.0510-M10 tapdepth16O 125 30 3021530 30 Based on ISO 9409-1-A125July 29th 2014A-97606-0293E 0518
210F,165F,125L210R,165RInstallation348(Mounting face)37(Mounting face)2812688-O 24 throughO 42 c'bore depth5(for fixing robot)8-M20 through(for mounting transportation equipment)5023030545J1-axisrotation center460Robot front230205 0.1Pin holes forpositioning areadded230270540205 0.1278278(Mounting face)310 0.145305A230(Mounting face)A2-O 16 H7 0.0180through460270540Section A-AJuly 29th 20143527827835A-97606-0293E 0519
Press handling package (option) The cooling fans for J1/J2 axis or J1/J2/J3 axis motorimprove duty performance. Suitable for high-duty application such as press-to-presshandling and high-speed palletizing. Available with R-30iB A-cabinet/B-cabinet controller.Cooling fanPower supplycablePower supply connectorfor cooling fanJuly 29th 2014A-97606-0293E 0520
Severe dust and liquid protection (option) Enhanced protective performance againstharsh environment Include motor covers, water proof connectorsand protection sheath for exposed cableMain body :IP56J3 arm, wrist : IP67 Anti-rust bolts and washers for exposed parts Available with epoxy paint designation (FoundryPRO)Motor coversWater proof connectorfor EE(RI/RO)Battery box coverJuly 29th 2014A-97606-0293E 0521
Zero-positioning plate (option) New option for zero degree mark in addition to scribe markand vernier mark seal Stainless plate and bolts for all Suitable for harsh J1-axisJ1-axisJuly 29th 2014J5-axisJ4-axisJ2-axisJ3-axisA-97606-0293E 0522
29.07.2014 · Robot Servo gun motion (Except pressuring time) 50mm interval x 10 points Average time R-2000 i B/210F with R-30 i B (Actual) R-2000 i C/210F with R-30 i B (Actual) X (Back & Forth) direction 0.485[sec] 0.402 [sec] Y (Side to side) direction 0.493[sec] 0.412 [sec] Z (Up & Down) direction 0.495[sec] 0.417[sec] 17% 16% 16% Tip distance Gun tip : 10mm