Transcription
The Basics of Permanent MagnetMotor OperationsBy George HollingCOURSE# - 1
Introduction IntroductionThe physics of permanent magnetsBasic PM motor operating principlesBasic motor parametersMotor constructionCOURSE# - 2
The Physics of Permament MagnetsCOURSE# - 3
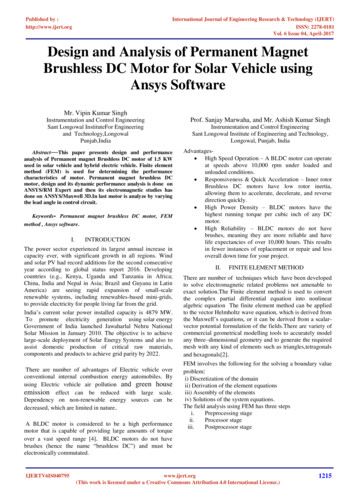
The Physics of Permament Magnets a typical magnetization curve for a PM magnet is shownhereCOURSE# - 4
The Physics of Permament Magnets the outmost outline of the magnetization curve isfor a single cycle of a fully magnetized magnet as the operating point of the magnetic circuit’spermeance P line intersects with thedemagnetization curve the magnet “weakens” the magnetization is not a single curve, but afamily of curvesCOURSE# - 5
The Physics of Permament Magnets the permeance P of the magnetic circuit determines theoperating point of the permanent magnetF mP ℜ gF : magnetic flux leakagem : magnet thickness parallel the direction of flux in inchesℜ : magnetic reluctance factor - typically 1.1 - 1.5g : air gap thickness parallel the direction of flux in inchesCOURSE# - 6
The Physics of Permament Magnets plotting the permeance into the magnetization curve yieldsthe operating point of the magnetic circuit–idealistic assumption –ignores the effects of demagnatization –no saturated steelµr 1internal field from windingsdemagnetization curvemagnet temperatureignores the effect of the magnet’s temperatureCOURSE# - 7
The Physics of Permament Magnets the magnet’s flux changes with temperature––reversibleirreversibleCOURSE# - 8
The Physics of Permament Magnets the magnet’s linear, reversible flux change as a function oftemperature is:B(T ) B(T0 )[1 β (T T0 )]B(T ) : air gap flux density at temperature TB(T0 ) : air gap flux density at temperature T0β : linear coefficient of demagnetizationT : magnet temperature ( C)COURSE# - 9
The Physics of Permament Magnets irreversible changes can occur in the magnet well belowits Curie temperatureCOURSE# - 10
The Physics of Permament Magnets the motor’s conductors can cause irreversible damage toits magnet the flux generated by an inductor in the magnet is:H Z i3 P (m g )Z : total number of conductorsi : the winding currentP : the permeance of the magnetic circuitm : magnet thickness parallel the direction of flux in inchesg : air gap thickness parallel the direction of flux in inchesCOURSE# - 11
The Physics of Permament Magnets each PM motor therefore has––a thermal current rating due to wire constraintsan absolute peak current rating due to magnet constraintsCOURSE# - 12
The Physics of Permament Magnets most PM motors use one of the following PMmagnet materials–––– Alnico: Aluminum Nickel CobaltFe3O4: Ceramic/FerriteSmCo: Samarium CobaltNeFeBo: Neodymium Iron Boronnone is generally “better” or “worse”COURSE# - 13
The Physics of Permament Magnets a comparison of different magnet materialsCOURSE# - 14
Basic PM motor operating principlesCOURSE# - 15
Basic PM motor operating principles PM motors operate on the principle that a force isgenerated when current flows in an inductor that is placedin a magnetic fieldCOURSE# - 16
Basic PM motor operating principles force generated in a conductor in a magnetic fieldFm i l ΒFm : mechanical force vectori:current flowing in the conductorl:length of the conductor (perpendicular to magnetic flux)Β:magnetic flux vectorCOURSE# - 17
Basic PM motor operating principles this force generates torque in a rotary motorT B r l Z iT : rotor torqueB : magnetic fluxr : average winding radiusl:effective conductor length (stack length)Z : number of conductorsi : current flowing in the conductorCOURSE# - 18
Basic PM motor operating principles a conductor that moves in a magnetic field generates avoltagelV vy Bx dz B l v0V : induced voltagev y : velocity of inductor perpendicular to the magnetic fieldBx : magnetic flux vectorCOURSE# - 19
Basic PM motor operating principles a rotary motor produces the back-EMF (Lenz’s Law)V B r l Z ωV : induced voltageB : magnetic flux vectorr : radiusl : effective conductor length (stack length)Z : number of condutorsω : angular velocityCOURSE# - 20
Basic PM motor operating principles inductor loop in a magnetic fieldCOURSE# - 21
Basic PM motor operating principles adding a mechanical commutator yields a brush PMDCmotor adding two or more mechanically offset windings yields aPM DLDC or PM BLAC motorCOURSE# - 22
Basic motor parametersCOURSE# - 23
Basic motor parameters the torque constant KtT Kt ω(N m)Kt B r l ZCOURSE# - 24(N m / A)
Basic motor parameters the back-EMF (voltage) constant KeV KE ω(volt)KE B r l ZCOURSE# - 25(volt/rad/sec)
Basic motor parameters armature resistance Ra (Ohm) armature inductance La (Henry) electrical time constant τe (sec) rotor inertia Jr (Kg · m2) damping constant Dm (N · m / rad / sec) mechanical time constant τm (sec) thermal resistance RΘ ( C / Watt) thermal capacitance CΘ (Joules / C) thermal time constant τtherm (sec)COURSE# - 26
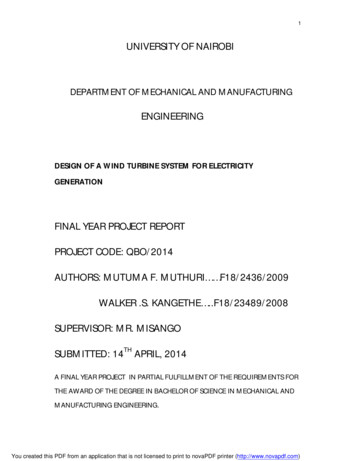
Basic motor parameters example of a typical speed/torque curve of a PM motorCOURSE# - 27
Basic motor parameters the “Safe Continuous Operating Area” SCOA– the motor can safely be operated continuouslyanywhere in this regionthe “Safe Intermittent Operating Area” SIOA–the motor may be operated in this region for shortperiods of time (typically 1 min)COURSE# - 28
Basic motor parameters the electrical equation for the PM DC machine is:dIV La Ra I K E ωdtCOURSE# - 29
Basic motor parameters the electrical equation for a single phase of thePM BLDC/BLAC machine with sinusoidal phasecurrent is:V (ϑ ) La COURSE# - 302 π ϑ2 π ϑ2 π2 π ϑ dϑ2 π cos() Ra I sin() KE sin() dt360360360360360
Basic motor parameters the power balance for the PM DC machine is:d L I2P () R I 2 KE ω Idt 22d L I2dJ ωP () R I2 () ( DM DL ) ω 2 (Tm TL ) ωdt 2dt2COURSE# - 31
Basic motor parameters the power analysis reveals that:d L I2() : magnetization energydt 2R I 2 : electrical copper losses in the windings - heatd J ω 2() : mechanical energydt2( DM DL ) ω 2 : damping losses(Tm TL ) ω : friction lossesCOURSE# - 32
Basic motor parameters the power supplied to the load is:Pmech K E ω I DM ω - Tm ω2COURSE# - 33
Basic motor parameters the maximum continuous current allowed is:Trise T25 C(A)R (Trise ) RΘI maxcont the maximum continuous torque allowed is:TmaxcontTrise T25 C K t (Trise ) (N m)R(Trise ) RΘCOURSE# - 34
Motor constructionCOURSE# - 35
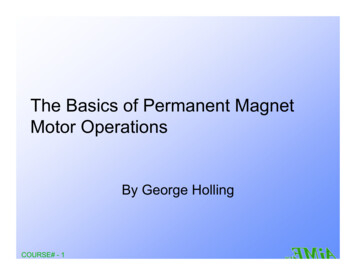
Motor construction the field in the stator poles changescontinuously, thus we must use laminated steelto reduce eddy current losses the backiron to support the PM flux is relativelyconstant and solid steel can be usedCOURSE# - 36
Motor constructionCOURSE# - 37
Motor construction the eddy current losses are:Peddyf:π 2 f 2τ 2 Β 2V 6ρPelectrical frequency of the motor (Hz)τ:thickness of the lamonations (m)ΒP : peak AC flux density (T)V:lamination volumeρ:volume electrical resistivity (ohm / m3 )COURSE# - 38
Motor construction motor steel choicesCOURSE# - 39
Motor construction motor windings are generally copper wire withinsulation (magnet wire) magnet wire comes in different grades–temperature –B, F, H, Cinsulation double, triplevoltage ratingCOURSE# - 40
Motor construction the resistance of the magnet wire changes with (thewire’s) temperatureR(T) R(T0 ) [1 α (T - T0 )]R(T0 ) :resistance at reference temperature, typically 25 C (ohm)T:α:winding temperature ( C)thermal coefficient for copper wire the value is 0.0039/ CCOURSE# - 41
the motor’s conductors can cause irreversible damage to its magnet the flux generated by an inductor in the magnet is:: air gap thickness parallel the direction of flux in inches: magnet thickness parallel the direction of flux in inches P: the permeance of the magnetic c