Transcription
MATEMÁTICAS AVANZADAS PARA INGENIERÍA, VOL. 1:ECUACIONESDIFERENCIALES
MATEMÁTICAS AVANZADAS PARA INGENIERÍA, VOL. 1:ECUACIONESDIFERENCIALESTercera ediciónDennis G. ZillLoyola Marymount UniversityMichael R. Cullen (finado)Loyola Marymount UniversityRevisión técnica:Natella AntonyanGabriel Cervantes BelloDepartamento de MatemáticasInstituto Tecnológico y de Estudios Superioresde Monterrey, campus Ciudad de MéxicoEscuela de Ingeniería y Arquitectura,Instituto Tecnológico y de Estudios Superioresde Monterrey, campus TolucaAndrés Basilio Ramírez y VillaJosé Abraham Balderas LópezFacultad de Ingeniería, Universidad NacionalAutónoma de México y Escuela de Ciencias Químicas,Universidad La SalleDepartamento de Matemáticas,UPIBI, Instituto Politécnico NacionalMÉXICO BOGOTÁ BUENOS AIRES CARACAS GUATEMALA LISBOAMADRID NUEVA YORK SAN JUAN SANTIAGO AUCKLANDLONDRES MILÁN MONTREAL NUEVA DELHI SAN FRANCISCO SÃO PAULOSINGAPUR SAN LUIS SIDNEY TORONTO
Director Higher Education: Miguel Ángel Toledo CastellanosDirector editorial: Ricardo A. del Bosque AlayónEditor sponsor: Pablo E. Roig VázquezEditora de desarrollo: Lorena Campa RojasSupervisor de producción: Zeferino García GarcíaTraducción: Erika Jasso Hernán D’BornevilleCarlos Roberto Cordero PedrazaMATEMÁTICAS AVANZADAS PARA INGENIERÍA, VOL. 1:ECUACIONES DIFERENCIALESTercera ediciónProhibida la reproducción total o parcial de esta obra,por cualquier medio, sin la autorización escrita del editor.DERECHOS RESERVADOS 2008 respecto a la primera edición en español porMcGRAW-HILL/INTERAMERICANA EDITORES, S.A. DE C.V.A Subsidiary of The McGraw-Hill Companies, Inc.Edificio Punta Santa FeProlongación Paseo de la Reforma 1015, Torre APiso 17, Colonia Desarrollo Santa Fe,Delegación Álvaro ObregónC.P. 01376, México, D. F.Miembro de la Cámara Nacional de la Industria Editorial Mexicana, Reg. Núm. 736ISBN-10: 970-10-6514-XISBN-13: 978-970-10-6514-3Traducido de la tercera edición en inglés de la obra: ADVANCED ENGINEERING MATHEMATICS, by Dennis G. Zilland Michael R. Cullen. Copyright 2006 by Jones and Bartlett Publishers, Inc., págs i-xxii, xxv-xxxiii, 1-298, 347-450,567-794, App-1-App-8, Ans-1-Ans-41 e I-1-I-23. Se reservan todos los derechos.ISBN-10: 0-7637-4591-XISBN-13: 978-0-7637-4591-2123456789009765432108Impreso en MéxicoPrinted in Mexico
Prefacio a la terceraedición en inglésA diferencia de un curso de “cálculo” o de “ecuaciones diferenciales”, donde el contenido del curso está muy estandarizado, el contenido de un curso titulado “matemáticaspara ingeniería” algunas veces varía de forma considerable entre dos instituciones académicas distintas. Por lo tanto, un texto sobre matemáticas avanzadas para ingenieríaes un compendio de muchos temas matemáticos, todos los cuales están relacionados entérminos generales por la conveniencia de su necesidad o utilidad en cursos y carrerassubsiguientes de ciencia e ingeniería. En realidad, no hay un límite para la cantidad detemas que se pueden incluir en un texto como el que ahora nos ocupa. En consecuencia,este libro representa la opinión de los autores, en este momento, acerca de lo que constituyen “las matemáticas para ingeniería”.Contenido del textoLos seis primeros capítulos constituyen un curso completo sobre ecuaciones diferenciales ordinarias. El capítulo sobre Matrices constituye una introducción a los sistemas deecuaciones algebraicas, los determinantes y el álgebra matricial con énfasis especial enaquellos tipos de matrices útiles en la resolución de sistemas de ecuaciones diferencialeslineales.Las secciones sobre criptografía, códigos para la corrección de errores, el método delos mínimos cuadrados y los modelos compartimentales discretos se presentan comoaplicaciones del álgebra matricial.Posteriormente se abordan los Sistemas de ecuaciones diferenciales lineales en elcapítulo 8 y el capítulo 9, los Sistemas de ecuaciones diferenciales no lineales. Ambosempatan fuertemente con el material sobre matrices que se presenta en el capítulo 7. Enel capítulo 8, los sistemas de ecuaciones lineales de primer orden se resuelven aplicandolos conceptos de valores propios, vectores propios, diagonalización y función exponencial por medio de una matriz. En el capítulo 9 se explican los conceptos de estabilidadmediante dos aplicaciones: flujo de fluido en un plano y movimiento de una cuenta sobreun cable.En el capítulo 10, Funciones ortogonales y series de Fourier, se presentan los temasfundamentales de conjuntos de funciones ortogonales y expansiones de funciones entérminos de una serie infinita de funciones ortogonales. Estos temas se utilizan posteriormente en los capítulos 11 y 12, donde los problemas de valor en la frontera en coordenadas rectangulares, polares, cilíndricas y esféricas se resuelven mediante la aplicación delv
método de separación de variables. En el capítulo 13, Método de la transformada integral, los problemas de valor en la frontera se resuelven por medio de las transformadasintegrales de Laplace y Fourier.Principales características de Matemáticasavanzadas para ingeniería, Vol. 1: Ecuacionesdiferenciales Todo el texto se modernizó a fondo para preparar a los ingenieros y científicos con lashabilidades matemáticas requeridas para estar a la altura de los desafíos tecnológicosactuales. Se han agregado nuevos proyectos de ciencia e ingeniería aportados por importantesmatemáticos. Estos proyectos están relacionados con los temas del texto. Se han añadido muchos problemas nuevos al libro. Además, fueron reorganizadosmuchos grupos de ejercicios y, en algunos casos, se han reescrito por completo paraseguir el flujo del desarrollo presentado en la sección y facilitar más la asignación detareas. Los grupos de ejercicios también ponen un gran énfasis en la elaboración deconceptos. Hay un gran énfasis tanto en las ecuaciones diferenciales como en los modelos matemáticos. La noción de un modelo matemático está entretejida a lo largo de todo eltexto, y se analiza la construcción y las desventajas de diferentes modelos. En la sección 5.3, Funciones especiales, se ha ampliado el análisis de las ecuacionesdiferenciales que se pueden resolver en términos de las funciones de Bessel. Tambiénpor primera vez se presentan las funciones de Bessel modificadas Iv(x) y Kv(x). En la sección 8.4, Sistemas lineales no homogéneos, se cubre el método de los coeficientes indeterminados. Otro método para resolver problemas no homogéneos de valor en la frontera fue agregado a la sección 11.6. Se enfatiza más el problema de Neumann en los capítulos 11 y 12. A lo largo de los capítulos 10, 11 y 12, la confusa mezcla de símbolos como l2 y1 l en la solución de problemas de valor en la frontera de dos puntos se ha reemplazado por el uso consistente de l . Los tres casos l a2, l 0 y l a2 seenfatizan mediante el análisis.Diseño del textoComo resultará evidente, el texto tiene un formato más amplio y un diseño interior a dostintas, con el fin de que la lectura y el aprendizaje de este libro sean más amenos y didácticos. Todas las figuras tienen textos explicativos. Se han agregado más comentariosy anotaciones al margen en todo el libro. Cada capítulo tiene una página de presentaciónque incluye una tabla de contenido y una breve introducción al material que se estudiará.Al final de cada capítulo se incluyen ejercicios de revisión. Después de los apéndices seproporcionan respuestas a los problemas impares seleccionados.AgradecimientosDeseo agradecer a las siguientes personas que generosamente destinaron tiempo de susocupadas agendas para proporcionar los proyectos incluidos en el texto:Anton M. Jopko, Departamento de Física y Astronomía, McMaster University.Warren S. Wright, Departamento de Matemáticas, Loyola Marymount University.viPREFACIO A LA TERCERA EDICIÓN EN INGLÉS
Gareth Williams, Departamento de Matemáticas y Ciencias Computacionales,Stetson University.Jeff Dodd, Departamento de Computación y Ciencias de la Información,Jacksonville State University.Matheus Grasselli, Departamento de Matemáticas y Estadística, McMasterUniversity.Dmitry Pelinovsky, Departamento de Matemáticas y Estadística, McMasterUniversity.También es un gusto poder agradecer a las siguientes personas por sus comentarios ysugerencias de mejora:Sonia Henckel, Loyola Technological University.Donald Hartig, California Polytechnic State University, San Luis Obispo.Jeff Dodd, Jacksonville State University.Victor Elias, University of Western Ontario.Cecilia Knoll, Florida Institute of Technology.William Criminale, University of Washington.Stan Freidlander, Bronx Community College.Herman Gollwitzer, Drexel University.Robert Hunt, Humboldt State University.Ronald Guenther, Oregon State University.Noel Harbertson, California State University.Gary Stoudt, Indiana University of Pennsylvania.La tarea de compilar un texto de esta magnitud fue, en pocas palabras, larga y difícil.A lo largo del proceso de pasar cientos de páginas manuscritas por muchas manos, sinlugar a dudas se nos pudieron haber escapado algunos errores. Por esto me disculpo deantemano, y desde luego, apreciaría saber acerca de cualquier error con el fin de corregirlo a la mayor brevedad.Dennis G. ZillLos AngelesPREFACIO A LA TERCERA EDICIÓN EN INGLÉSvii
Prólogo a la edición en españolPara que la selección de temas pudiera ser flexible, el texto original en inglés fue dividido en cuatro partes o subdivisiones principales. Para la edición en español, se optó pordividir el texto en dos volúmenes que se pueden manejar de manera independiente. Elprimero, que tiene el lector en sus manos, trata de las ecuaciones diferenciales ordinariasy parciales, además de contener el capítulo sobre matrices. El panorama general de sucontenido se puede ver en el prólogo a la edición en inglés.Agradecemos el apoyo de los siguientes profesores para el desarrollo de este proyecto:Angel Varela, ITECArturo Patrón, ITECAureliano Castro, UAS, Escuela de IngenieríaClaudio de Jesús Pita Ruiz V., Universidad PanamericanaDaniel Hadad Cartas, UAEMDavid Juárez Luna, ITESM CCMEduardo Soberanes, ITESM CuliacánEliseo A. Sosa Altamirano, ESIME CulhuacánErnesto Filio, ITESM CCMFernando Elizalde, U de G (CUCEI)Jesús Palacios, Universidad MaristaJose Calderón Lamas, ITECJose Carlos Aragón Hernández, ITECJosé Humberto Jacobo Escobar, UAS, Facultad de Ciencias Químico BiológicasJuan Castañeda, UAS, Facultad de Ciencias Químico BiológicasJuana Murillo Castro, UAS, Escuela de IngenieríaLeopoldo Cendejas, ITESM CCMLudmilla Gumen, UPAEPLuis Felipe Flores, ITLMManuel Ramón Apodaca Sánchez, ITLMMarcial Arrambi Díaz, ITCMarco Antonio Rodríguez Rodríguez, ITLMMaría González Cerezo, ITESM CuernavacaMartín Pérez, ITESM CSFOscar Esperanza, ITESM CCMOscar Guerrero, ITESM CuliacánRamón Duarte, UAS, Escuela de IngenieríaRaúl Soto López, UDO Culiacánix
ContenidoPrefacio a la tercera edición en inglésPrólogo a la edición en españolProyecto para la sección 3.7Anton M. Jopko, Ph.D.vixIlusiones ópticas en el caminoProyecto para la sección 3.10 El péndulo balísticoWarren S. WrightxviixviiiProyecto para la sección 7.1Gareth Williams, Ph.D.Red de dos puertos en circuitoseléctricos xixProyecto para la sección 7.2Gareth Williams, Ph.D.Flujo de tráficoxxiProyecto para la sección 7.15 Dependencia de la resistividad enAnton M. Jopko, Ph.D.la temperatura xxiiiProyecto para la sección 12.3 El átomo de hidrógenoMatheus Grasselli, Ph.D.xxivProyecto para la sección 13.4 La desigualdad de incertidumbreJeff Dodd, Ph.D.en el procesamientode señales xxviiProyecto para la sección 13.4 Difracción de Fraunhofer a travésAnton M. Jopko, Ph.D.de una abertura circular xxixProyecto para la sección 14.2 Inestabilidades en métodosDmitry Pelinovsky, Ph.D.numéricos xxxiParte 1 Ecuaciones diferenciales ordinarias 3Capítulo 1 Introducción a las ecuaciones diferenciales 41.1Definiciones y terminología51.2Problemas de valor inicial1.3Ecuaciones diferenciales como modelos matemáticos14Ejercicios de repaso del capítulo 12133xi
Capítulo 2 Ecuaciones diferenciales de primer orden 352.12.22.32.42.52.62.72.82.9Curvas solución sin solución 362.1.1 Campos de direcciones 362.1.2 Ecuaciones diferenciales autónomas de primerorden 38Variables separables 45Ecuaciones lineales 52Ecuaciones exactas 60Soluciones por sustitución 67Un método numérico 71Modelos lineales 75Modelos no lineales 85Modelación con sistemas de ecuaciones diferenciales deprimer orden 94Ejercicios de repaso del capítulo 2 100Capítulo 3 Ecuaciones diferenciales de orden superior 1043.1Teoría preliminar: ecuaciones lineales 1053.1.1 Problemas de valor inicial y de valores enla frontera 1053.1.2 Ecuaciones homogéneas 1073.1.3 Ecuaciones no homogéneas 1123.2 Reducción de orden 1163.3 Ecuaciones lineales homogéneas con coeficientesconstantes 1193.4 Coeficientes indeterminados 1263.5 Variación de parámetros 1353.6 Ecuación de Cauchy-Euler 1403.7 Ecuaciones no lineales 1453.8 Modelos lineales: problemas de valor inicial 1503.8.1 Sistemas resorte-masa: movimiento libre noamortiguado 1503.8.2 Sistemas resorte-masa: movimiento libreamortiguado 1533.8.3 Sistemas resorte-masa: movimiento forzado 1563.8.4 Circuito en serie análogo 1593.9 Modelos lineales: problemas de valores en lafrontera 1663.10 Modelos no lineales 1743.11 Resolución de sistemas de ecuaciones lineales 183Ejercicios de repaso del capítulo 3 190Capítulo 4 La transformada de Laplace 1934.14.24.3xiiCONTENIDODefinición de la transformada de Laplace 194La transformada inversa y transformadas dederivadas 1994.2.1 Transformadas inversas 1994.2.2 Transformadas de derivadas 201Teoremas de traslación 2074.3.1 Traslación en el eje s 2074.3.2 Traslación en el eje t 210
4.44.54.6Propiedades operacionales adicionales 2184.4.1 Derivadas de transformadas 2184.4.2 Transformadas de integrales 2204.4.3 Transformada de una función periódica 223La función delta de Dirac 228Sistemas de ecuaciones diferenciales lineales 231Ejercicios de repaso del capítulo 4 236Capítulo 5 Soluciones en serie para ecuaciones diferencialeslineales 2395.15.25.3Soluciones en torno a puntos ordinarios 2405.1.1 Repaso de las series de potencias 2405.1.2 Soluciones en series de potencias 242Soluciones en torno a puntos singulares 251Funciones especiales 2605.3.1 Funciones de Bessel 2605.3.2 Funciones de Legendre 267Ejercicios de repaso del capítulo 5 273Capítulo 6 Soluciones numéricas a ecuaciones diferencialesordinarias 2756.16.26.36.46.5Métodos de Euler y análisis de errores 276Métodos de Runge-Kutta 280Métodos de varios pasos 286Ecuaciones y sistemas de orden superior 288Problemas de valores en la frontera de segundoorden 293Ejercicios de repaso del capítulo 6 297Parte 2 Matrices 299Capítulo 7 3300Álgebra matricial 301Sistemas de ecuaciones algebraicas lineales 310Rango de una matriz 321Determinantes 326Propiedades de los determinantes 331Inversa de una matriz 3387.6.1 Cálculo de la inversa 3387.6.2 Utilización de la inversa para resolversistemas 344Regla de Cramer 348El problema del valor propio 351Potencias de las matrices 357Matrices ortogonales 361Aproximación de valores propios 368Diagonalización 375Criptografía 384CONTENIDOxiii
7.14 Código corrector de errores 3877.15 Método de los mínimos cuadrados 3937.16 Modelos discretos de compartimiento 396Ejercicios de repaso del capítulo 7 400Parte 3 Sistemas de ecuaciones diferenciales 405Capítulo 8 Sistemas de ecuaciones diferenciales lineales 4068.18.28.38.48.5Teoría preliminar 407Sistemas lineales homogéneos 4148.2.1 Valores propios reales distintos 4158.2.2 Valores propios repetidos 4188.2.3 Valores propios complejos 422Solución mediante diagonalización 427Sistemas lineales no homogéneos 4308.4.1 Coeficientes indeterminados 4308.4.2 Variación de parámetros 4338.4.3 Diagonalización 435Matriz exponencial 438Ejercicios de repaso del capítulo 8 442Capítulo 9 Sistemas de ecuaciones diferencialesno lineales 4449.19.29.39.49.5Parte 4Sistemas autónomos 445Estabilidad de los sistemas lineales 451Linealización y estabilidad local 460Sistemas autónomos como modelos matemáticos 469Soluciones periódicas, ciclos límite y estabilidadglobal 477Ejercicios de repaso del capítulo 9 486Series de Fourier y ecuaciones diferencialesparciales 489Capítulo 10 Funciones ortogonales y series de Fourier 49010.110.210.310.410.510.6Funciones ortogonales 491Series de Fourier 496Series de Fourier de cosenos y senos 501Series complejas de Fourier 508Problema de Sturm-Liouville 512Series de Bessel y de Legendre 51910.6.1 Serie de Fourier-Bessel 52010.6.2 Serie de Fourier-Legendre 523Ejercicios de repaso del capítulo 10 526Capítulo 11 Problemas de valores en la frontera en coordenadasrectangulares 52711.1 Ecuaciones diferenciales parciales separables 528xivCONTENIDO
11.2 Ecuaciones clásicas y problemas de valores en lafrontera 53211.3 La ecuación de calor 53711.4 La ecuación de onda 54011.5 La ecuación de Laplace 54511.6 Problemas de valores en la frontera no homogéneos 55011.7 Desarrollos en series ortogonales 55711.8 Serie de Fourier con dos variables 561Ejercicios de repaso del capítulo 11 564Capítulo 12 Problemas de valores en la frontera en otrossistemas coordenados 56612.1 Problemas en coordenadas polares 56712.2 Problemas en coordenadas polares y cilíndricas: funcionesde Bessel 57212.3 Problemas en coordenadas esféricas: polinomios deLegendre 578Ejercicios de repaso del capítulo 12 581Capítulo 13 Método de la transformada integral 58313.113.213.313.413.5Función de error 584Aplicaciones de la transformada de LaplaceIntegral de Fourier 593Transformadas de Fourier 598Transformada rápida de Fourier 604Ejercicios de repaso del capítulo 13 613585Capítulo 14 Soluciones numéricas de ecuaciones diferencialesparciales 61514.1 La ecuación de Laplace 61614.2 La ecuación de calor 62114.3 La ecuación de onda 627Ejercicios de repaso del capítulo 14ApéndicesIIIIII630AP-1Algunas fórmulas de derivadas e integralesFunción gamma AP-4Tabla de transformadas de Laplace AP-6AP-2Respuestas a los problemas seleccionados denúmero impar RESP-1Índice I-1CONTENIDOxv
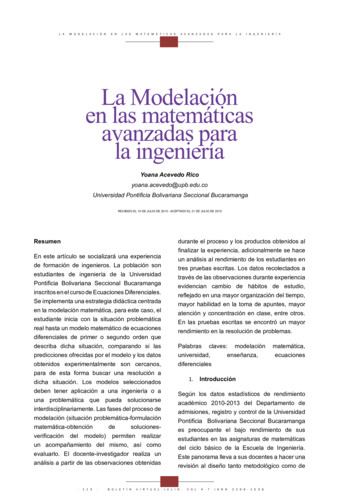
PROYECTO PARA LA SECCIÓN3.7Ilusiones ópticasen el caminoAnton M. Jopko, Ph. D.Departamento de física y astronomía,McMaster UniversityLa mayoría de nosotros hemos conducido por algunacarretera durante un día soleado, y hemos visto a ladistancia una mancha luminosa en el camino que se vecomo un parche de hielo. Esta mancha se mueve, desaparece y reaparece, a medida que conducimos.La velocidad de la luz en un medio está dada porn c n , donde c es la velocidad de la luz en el vacíoy n el índice de refracción del medio. Como la velocidad de la luz no puede ser mayor que c, el índice derefracción siempre satisface n ⱖ 1. Para el aire frío, ladensidad y el índice de refracción son mayores, de manera que la velocidad de la luz es más lenta. Por otraparte, para el aire caliente, la densidad y el índice derefracción son menores, así que la velocidad de la luzes más rápida. Cuando la luz viaja entre dos medioscon índices de refracción diferentes, se dobla o refracta. La figura 1 muestra la luz que el aire refracta conforme la densidad cambia. El pavimento está caliente,así como el aire que está inmediatamente encima. Esteconjunto de circunstancias propicia que la densidad delaire sea más pequeña. Más arriba el aire es más frío,lo cual provoca que su densidad aumente con la altura;como consecuencia, su índice de refracción aumenta.El índice de refracción es cercano a 1 en la superficie del camino y aumenta con mucha lentitud segúnla altura sobre el camino. La luz brillante del cielo serefracta a medida que se acerca más al camino, de manera que entra en los ojos del conductor como se veen la figura 1. De hecho, la luz nunca toca el camino;más bien, parece provenir directamente de éste comoun brillante parche en la distancia.Vérticecamino horizontal. Esto implica que la trayectoria de laluz sea simétrica respecto al eje vertical que atraviesa elpunto más bajo de la curva. Llamamos a este punto másbajo vértice. Si y(x) denota la ecuación de la trayectoriaseguida por la luz, es posible demostrar que y satisfacela ecuación diferencial de segundo orden no linealdy 2 1 dnd 2y c1 ab dn dydxdx 2Para resolver esta ecuación diferencial necesitamos conocer n(y). Consideraremos algunos ejemplos de n(y)en el siguiente apartado de Problemas relacionados.También veremos cómo resolver la ecuación (1) usando la técnica de reducción de orden. Estos casos quizáno sean muy realistas, pero tienen la característica deque n es constante o aumenta con la altura y. En cualquier caso, la ecuación (1) se resuelve sin dificultad.Problemas relacionados1. Si el índice de refracción n(y) es una función crecientede y, explique por qué la trayectoria de la luz descritamediante una solución y(x) de (1) debe ser cóncavaascendente.2. Suponga que n(y) constante. Éste es un caso especial donde el aire tiene densidad uniforme. Entoncesla ecuación (1) se convierte en d2y dx2 0.a)b)c)3. a)b)Refracción de la luz por el aireDigamos que el índice de refracción del aire n(y)depende sólo de la altura vertical y situada por encimadel camino, y que el eje x se encuentra a lo largo delxviSuponga que n1y2 ey a, donde a y y se midenen metros y a es grande (digamos, 10 000 m).Muestre que la ecuación (1) se convierte enEn la ecuación diferencial del inciso a) falta lavariable dependiente y, por lo que la sustituciónapropiada esdyd 2y du. u y dxdxdx 2Encuentre la nueva ecuación diferencial para u(x)y resuélvala.c)Figura 1¿Cuál es la solución para esta ecuación diferencial?¿Cuál es la concavidad de la gráfica de esta solución?¿Por qué la solución del inciso a) es lógica desdeel punto de vista físico para el índice de refracción dado?d 2y 1dy 2 c1 a b d .2adxdxLuz del cieloTrayectoria realLa mancha luminosa aparece aquí(1)Use el resultado que obtuvo en el inciso b) y lasustitución u dy dx para encontrar la nuevaecuación diferencial para y(x) y resolverla.d ) Ahora suponga que los ojos del conductor están a1.2 m por encima del camino, y que el vértice dela trayectoria está a 1.19 m por encima del caminoy a 50 m frente al conductor. Use la solución queobtuvo en el inciso c) para encontrar la distanciaPROYECTO PARA LA SECCIÓN 3.7 Ilusiones ópticas en el camino
que hay entre el automóvil y el brillante parchedel camino.4. a)Suponga que n 1 y 2 1y, y ⱖ 1 , donde y semide en metros. Muestre que la ecuación (1) seconvierte end2ydy 21c1 a b d .2 dx2ydxb)La variable independiente x no se encuentra en laecuación diferencial del inciso a) y por tanto lasustitución adecuada esdy udxyc)d)Utilice el resultado del inciso b) y la sustituciónu dy dx para encontrar una nueva ecuación diferencial para y(x) y resuélvala.Ahora suponga que los ojos del conductor se encuentran a 1.2 metros sobre el camino, y el vértice de la trayectoria se encuentra a 1.19 metrossobre el camino y 3 metros frente al conductor.Utilice la solución del inciso c) para encontrar ladistancia desde el automóvil a la sección brillantesobre el camino.d 2ydu. udydx 2Encuentre la nueva ecuación diferencial para u(y)y resuélvala.PROYECTO PARA LA SECCIÓN 3.7 Ilusiones ópticas en el caminoxvii
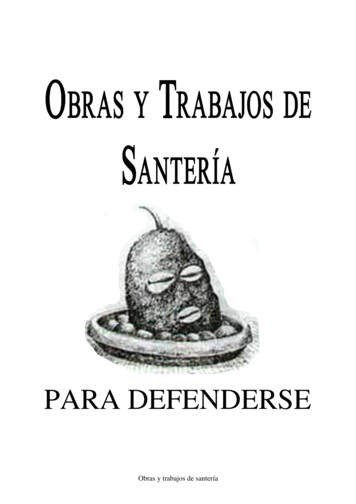
PROYECTO PARA LA SECCIÓN3.10 mbWarren S. WrightDepartamento de matemáticas,Loyola Marymount UniversitymbFigura 1Históricamente, con el objetivo de mantener el controlde calidad de las municiones (balas) fabricadas por unalínea de producción, el fabricante utilizaba un péndulobalístico para determinar la velocidad de barril de unapistola, es decir, la velocidad de una bala cuando saledel cañón. El péndulo balístico (inventado en 1742)sencillamente es un péndulo plano que consiste deuna varilla de masa despreciable a la que se le conectaun bloque de madera de masa mw. El sistema se poneen movimiento por medio del impacto de una bala, lacual se desplaza de forma horizontal a una velocidadvb desconocida; en el momento del impacto, t 0, lamasa combinada será mw mb, donde mb representa lamasa de la bala incrustada en la madera. En la sección3.10 observamos que para el caso de pequeñas oscilaciones, el desplazamiento angular u 1t2 de un pénduloplano como el mostrado en la figura 1 está dado porla ecuación diferencial lineal u– 1g l2u 0, dondeu 7 0 corresponde al movimiento a la derecha de lavertical. La velocidad vb puede obtenerse por medio dela medición de la altura h de la masa mw mb en elmáximo ángulo de desplazamiento máx que se muestraen la figura 1.De forma intuitiva, sabemos que la velocidad horizontal V de la masa combinada (madera y proyectil)después del impacto solamente es una fracción de lambbvb. Ahoravelocidad vb de la bala: V amw mbrecuerde que una distancia s recorrida por una partícula que se desplaza sobre una trayectoria circularestá relacionada con el radio l y el ángulo central por medio de la fórmula s lu. Al derivar esta últimaxviiiθ máxlEl péndulo balísticomwvbmwhVPéndulo balísticofórmula respecto al tiempo t, tenemos que la velocidad angular v de la masa y su velocidad lineal v estánrelacionadas por medio de v lv. De esta forma, lavelocidad inicial angular v0 en el tiempo t en el que elproyectil impacta al bloque de madera está relacionadombvbb .con V por medio de V lv0 o v0 amw mb lProblemas relacionados1. Resuelva el problema de valor inicialgd2u u 0, u102 0, u¿ 102 v0 .2ldt2. Utilice el resultado del problema 1 para demostrarquevb amw mbb 1lg umáx .mb3. Utilice la figura 1 para expresar cos máx en términosde l y h. Luego utilice los primeros dos términos de laserie de Maclaurin de cos para expresar máx en términos de l y h. Por último, demuestre que vb estádada (de forma aproximada) porvb amw mbb 12gh.mb4. Utilice el resultado del problema 3 para encontrar vbcuando mb 5 g, mw 1 kg, y h 6 cm.PROYECTO PARA LA SECCIÓN 3.103.7 IlusionesEl pénduloópticasbalísticoen el camino
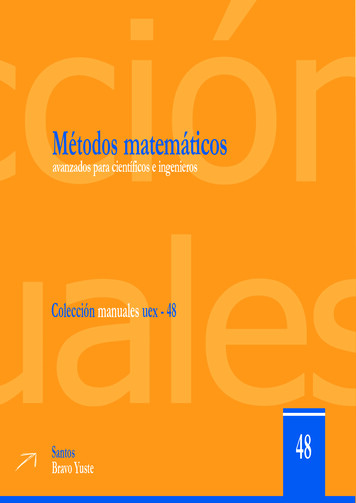
PROYECTO PARA LA SECCIÓNuna forma lineal y determinan la matriz de transmisión.Nuestro método será construir dos ecuaciones: una queexprese a V2 en términos de V1 e I1, y la otra que expresea I2 en términos de V1 e I1. Posteriormente combinaremos estas dos ecuaciones en una sola ecuación matricial.Utilizamos la siguiente ley:7.1Red de dos puertosen circuitos eléctricosLey de Ohm: La caída de voltaje a través de una resistencia es equivalente a la corriente multiplicadapor la resistencia.Gareth Williams, Ph. D.Departamento de matemáticas y cienciascomputacionales, Stetson UniversityLa caída de voltaje a través de la resistencia seráV1 V2. La corriente a través de la resistencia es I1.Por tanto, la ley de Ohm establece que V1 V2 I1R.La corriente I1 pasa a través de la resistencia R y existe como I1. De esta forma, I2 I1. Primero escribimosestas dos ecuaciones en la forma estándar,Muchas redes eléctricas están diseñadas para aceptarseñales en ciertos puntos y producir una versión modificada de éstas. El arreglo general se ilustra en la figura1. Una corriente I1 a un voltaje V1 se envía sobre unaI1I2 0V1 I1I2y luego como una ecuación matricial,Dos puertosV1V2I1Figura 1V2 V1 RI1aI21 Rb. De esta10forma si R equivale a 2 ohms y el voltaje y corriente deentrada son V1 5 volts e I1 1 ampere, respectivamente, obtenemosLa matriz de transmisión es aRed eléctricared de dos puertos, y ésta determina de alguna forma lacorriente de salida I2 al voltaje V2. En la práctica, la relación entre las corrientes y voltajes de entrada y salidapor lo general es lineal, y se encuentran relacionadaspor una ecuación matricial:aV2a11b aI2a21aa12 V1b a b.a22 I1a11 a12b se denomina maa21 a22triz de transmisión del puerto. La matriz define a lared de dos puertos.En la figura 2 se presenta un ejemplo de una red dedos puertos. La parte interior consiste en una resistenciaR conectada como se muestra. Podemos demostrar quelas corrientes y los voltajes en efecto se comportan deI1aI2RV21b aI20 2 53b a b a b.1 11El voltaje y la corriente de salida serán 3 volts y 1 ampere respectivamente.En la práctica, se colocan en serie varias redes dedos puertos estándar como la que se describió arribapara obtener un cambio de voltaje y corriente deseado.Considere las tres redes de dos puertos de la figura 3,cuyas matrices de transmisión son A, B y C.Al considerar cada red de forma independiente, tenemos queLa matriz de coeficientes aV1V21 R V1b aba b.I21 I10V2V1b A a b,I2I1Al sustituir aV2aV3V2b B a b,I3I2aV4V3b C a b.I4I3V2b de la primera ecuación en la segundaI2obtenemosI1Figura 2I2Red de dos puertosI1I2AV1I1Figura 3aI2BV2I2I3I2I3I4CV3I3V3V1b BA a b .I3I1I3V4I4Dos puertos en seriePROYECTO PARAPROYECTOLA SECCIÓNPARA LA7.1SECCIÓNRed de 3.7dos Ilusionespuertos enópticascircuitosen eleléctricoscaminoxix
Al sustituir la última matriz a2. La corriente a través de R1 es I1 I2. La caída de vol-V3b en la tercera ecuaI3taje a través de R1 es V1. La corriente a través de R2 esI2. La caída de voltaje a través de R2 es V1 V2 .ción obtenemosI1VVa 4 b CBA a 1 b .I4I1R2Figura 5Red de dos puertos para el problema 2través de R1 es V1 V2. La corriente a través de R2 esI1 I2. La caída de voltaje a través de R2 es V2.I1R1I1I2Red de dos puertos para el problema 34. La red de dos puertos de la figura 7 consiste de tresredes de dos puertos colocadas en serie. Las matricesde transmisión son las que se muestran.V2a)I2b)Red de dos puertos para el problema 13 amperesI2( (1 –10 1I2¿Cuál es la matriz de transmisión de la red de dospuertos compuesta?Si el voltaje de entrada equivale a 3 volts y lacorriente a 2 amperes, determine el voltaje y la corriente de salida.I3( (1 01 1V2I2xxFigura 6I2RV2R2I1forma directa. La corriente a través de la resistencia Res I1 I2. La caída de voltaje a través de R será V1.I1I2V11. V1 V2 debido a que las terminales se conectan deFigura 7I23. La corriente a través de R1 es I1. La caída de voltaje aEn los problemas 1-3, determine las matrices de transmisión de las redes de dos puertos que se muestran enla fig
avanzadas para ingeniería, Vol. 1: Ecuaciones diferenciales Todo el texto se modernizó a fondo para preparar a los ingenieros y científicos con las habilidades matemáticas requeridas para estar a la altura de los desafíos tecnológicos actuales. Se han agregado nuevos proyectos de ciencia e ingeniería aportados por importantes