Transcription
High Altitude Ballooning for Spaceand Atmospheric ObservationStudy start date: March 1st, 2011Study end date: December 31st, 2011Final Report submission date: March 26th, 2012Team Leads:Robert KarolCaltech High Altitude Ballooning Grouprobkarol@caltech.eduJoshua Warren LeeCaltech High Altitude Ballooning Groupjoshuawarrenlee@gmail.com
Table of ContentsI. Project SummaryII. Introductiona. Technical Motivation and Opportunitiesb. Scope of the ProjectIII. Project Componentsa. High Altitude Launches and Field Experimentsb. Design and Programming WorkshopsIV. Outcome of the Projecta. Resultsb. Roadmap for Technical Developmentc. Current and Future ProjectsV. ConclusionVI. Acknowledgments2
I. Project SummaryThe purpose of our project was to conduct a series of high altitude balloon experimentson student-designed launch platforms. Many design goals were considered, including,but not limited to: horizontal control for helium weather balloons, tethered cameraplatforms (controlled and passive), rocket and glider payloads, self-stabilizingplatforms, high-definition video platforms, and miscellaneous data collection. Over thecourse of the project, the High Altitude Ballooning Group completed two successfulhigh altitude launches and several workshops on payload design and microcontrollerprogramming. We have also conducted tests on tethered camera payloads, includingfield tests in Alaska for a related JPL study on imaging methane seeping from underfrozen lakes.II. Introductiona. Technical Motivation and OpportunitiesIn the summer of 2010, the Caltech Ballooning Group participated in a competitiontitled “Hackerspaces in Space” which introduced us to the field of high altitude aerialphotography with weather balloons. Over the course of three months, we launchedtwo simple payloads, but were only able to retrieve one. This was due to the fact thatour funding was limited – our onboard cameras were used and broken and our trackingsystem consisted of a prepaid cell phone with GPS. The airframe for the survivingpayload was cut from scrap Styrofoam. Regardless, the payload we retrieved tookamazing pictures and piqued our interest in the field.With funding from the Keck Institute for Space Studies, our project group hoped toinvestigate the mechanics of high altitude flight with multi-balloon launches andcontrolled landings for payloads. We also wanted to test cost-effective tetheredcamera platforms and their advantages and limitations compared to other forms ofaerial imaging. To increase efficiency and the rate of recovery, we also wanted todesign rugged, reusable payload airframes with modular ports that would allow formany different experiments and instruments. This included a more advanced flightcomputer that would monitor GPS data and sensor inputs.Finally, our group wanted to increase awareness of amateur high altitude projects inthe Caltech community by holding informal workshops for Caltech students.b. Scope of the ProjectWith the generous funding from the Keck Institute, we were able to design a number ofballoon payloads, but due to time constraints we had to focus our attention on ahandful of projects. Our main focus dealt with aerial imaging with a stabilized platformand relaying the images to ground stations. At the same time, we produced reusable,modular payload frames that would allow us to develop experiments more quickly and3
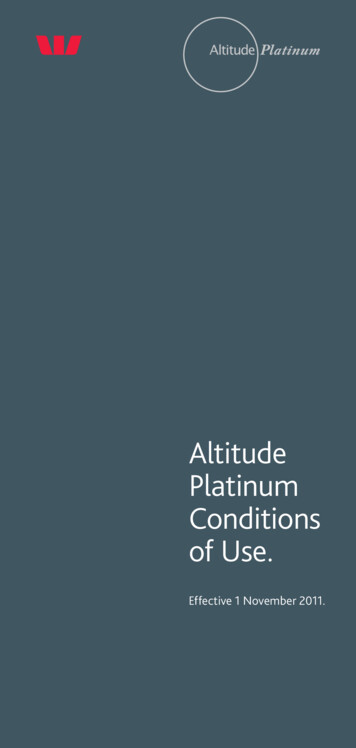
efficiently. We also wanted to measure the internal pressure in the balloon and itschanges during flight. Understanding changes in internal balloon pressure could helpus optimize multi-balloon launches which would allow us to increase the maximumaltitude and flight duration of our payloads. Finally, we wanted to design a payload thatwould relay video of an untethered flight back to a ground station.III. Project Launchesa. High Altitude Launches and Field ExperimentsFirst Launch – August 14th, 2011The first launch was aprototype to test thenew equipment as wellas the Spot GPStransmitter used to trackthe balloon during itsflight. The secondarypurpose of the launchwas to introduce newgroup members tolaunch and retrievalprocedures.PayloadSince this was aprototype to test thenew equipment and theairframe did not need tobe reused, we usedinexpensive insulatedcooler bags. The threemain components of thepayload were a camera,a Spot GPS messenger,and a microcontrollerprogrammed to recordthe balloon’s GPSposition.Camera – We chose touse a CanonPowerShot SD550 asFig. 1 Pictures taken by balloon at its peak altitude and during ascent4
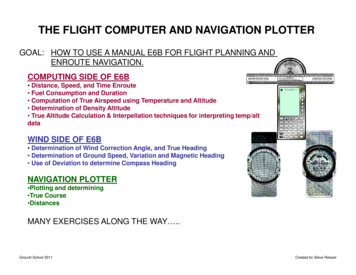
the onboard camera. Using the Canon Hacker Development Kit (CHDK), wereprogrammed the camera to act as an intervalometer to take pictures at set intervals.This camera was used in a previous launch and provided surprisingly detailed pictureseven with its low resolution.Tracking system – The Spot GPS messenger broadcasts its current GPS coordinatesthrough a satellite link every ten minutes. The GPS data points are then recorded ontothe Spot website. This allowed us to track the balloon nearly in real time.Unfortunately, the device only worked up to around 22,000 feet so it would only recordthe initial launch and the final descent. Still, it continued to broadcast its position afterlanding, making retrieval of the payload much simpler than with the faulty trackingsystem in our previous launches.Fig. 2 The balloon's flight path over Lucerne ValleyMicrocontroller – We used anArduino Uno microcontrollerwith a GPS logging shield torecord precise GPScoordinates throughout thelaunch. The microcontrollerwas programmed in C torecord GPS position dataevery second and to store itin an onboard SD memorycard. This gave us a verydetailed plot of the path theballoon traveled. This wasnecessary since the Spotmessenger could onlytransmit coordinates everyten minutes and only when ithad a stable fix at lowaltitude.Our first payload took two attempts to launch. The single-use airframe proved toounstable and heavy for the smaller 200 gram weather balloon we used, so we had toscrap the airframe and use a lighter, more compact container with less insulation. Thelaunch, however, was a success, and the payload was recovered after four hours.Second Launch – September 25th, 2011Our second launch was the first real use of our reusable payload airframe. With asturdy Styrofoam base, it contained five experiment ports (four to the sides, onepointing up), each five inches square. An abrasion jacket made from rip-stop nyloncovered the whole airframe to reduce wind and landing damage as well as strain onthe package from the parachute tethers. The number of connections to the parachute5
was increased from one to four. This stabilized the payload and provided redundancyin case one of the tethers snapped. This launch also contained a more comprehensivescientific payload, as well as an enhanced flight computer and a high definition videocamera.PayloadFlight computer – The Arduinomicrocontroller with GPS datalogging shield was reused for thislaunch, but the code was updatedto include altitude and to log datafrom the sensor array. Themicrocontroller also handled timedependent in-flight events, suchas a siren/LED unit to help locatethe payload after landing. Itperformed well during the flight,but the recorded raw data was inan unmanageable format andrequired a time-consumingconversion until it could beanalyzed.Sensor array – One of the maingoals of this launch was to recordtemperature and absolutepressure inside of the payload.Gauge pressure sensors wereused to measure the difference inpressure between the inside ofFig. 3 Modular payload airframe with abrasion jacketthe airframe to the inside of theweather balloon. Plastic tubing was run from the payload to a brass pipe inserted intothe neck of the balloon to make this measurement. Unfortunately, the sensitivity of thegauge pressure sensors was too small to show a significant difference between balloonand atmospheric pressure. After the balloon burst, the added weight from the tubingalso destabilized the payload’s descent causing damage to two of the five airframemounting ports. Two temperature sensors were used to measure inside and outsidetemperatures, but the inside temperature sensor failed due to an electrical short.Nevertheless, the outside temperature and atmospheric pressure sensors workedcorrectly and were used to estimate the peak altitude at around 92,500 feet.HD Video – The second main objective of this launch was to record high definitionvideo of the entire flight. We used a GoPro HD Hero camera set to 1080p. A GoProBattery BacPac was added to increase the operation time of the camera well past theduration of the flight.6
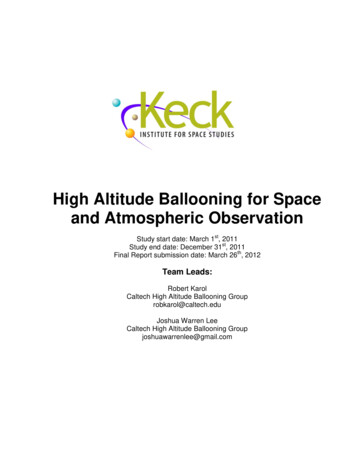
A secondary objective of this launch was to observe the balloon’s expansion and burstas well as to monitor the condition of the pressure sensor tubing. The CanonPowerShot used in the August launch was mounted to the upward-facing experimentport and took pictures every five to thirty seconds. Not only did it capture theexpansion and burst, but it also recorded the gradual change of the atmosphere’s colorfrom blue to black.Fig. 4 Images from upper camera (left: early ascent right: peak altitude)Field Experiments (and Canceled Third Launch)The third launch contained animproved and repaired sensor arrayas well as a 1 Watt 2.4 GHztransmitter that would relay a livevideo feed from the GoPro camera.The port mounts were also rebuilt tobe more durable than the lastlaunch. The modular aspect of thereusable airframe proved to beextremely useful since we were ableto rearrange various payloadcomponents in a more efficientplacement. We conducted severalsuccessful ground tests with thetransmitter, but unfortunately thelaunch had to be canceled due tohigh wind conditions.Fig. 5 Stabilization tests with a tethered weather balloonIn addition to the payload ground tests, we also performed tests on the tethered aerialphotography platforms that were to be used in Alaska. Information on thoseexperiments can be found in the attached JPL report: “Identification of Methane Seeps7
under Arctic Lakes”.b. Design and Programming WorkshopsOne of our goals of this project was to increase awareness in the Caltech community ofballoon experiments and to teach students how to design their own. We held twoinformal workshops in addition to our design meetings. They focused on two importantaspects of balloon payload design: different payload subsystems and microcontrollerprogramming. Each participant was given an Arduino Uno microcontroller kit and thechance to design their own experiments. We taught students how to code themicrocontrollers in C and gave examples of various control circuits. Overall, it was asuccess and helped students understand the complexities of payload design.IV. Outcome of the Projecta. ResultsAll of the photography platforms worked as intended as well as the data telemetry. Thesecond launch payload provided key data in analyzing the flight profile of the balloon.From the altitude data, we found that the ascent rate was surprisingly regular eventhough the change in pressure was not. With a linear regression line, we found theascent rate to be approximately 5 m/s.8
Similarly, the descent rate could be calculated from the second half of the altitude data.The regression for the descent rate gives 10 meters/second, but with deceleration dueto the increasing density of the atmosphere the accuracy of the calculation decreases.There was also a limit on the GPS altitude data recorded by the flight computer. TheGPS failed above 24,000 meters and only would only reactivate once the payloaddropped below 17,250 meters. This is due to the altitude restriction set by the USgovernment on most GPS devices. In future launches we will use a GPS capable ofaccurate readings up to 85 km, but for this launch the maximum altitude had to be9
extrapolated though the absolute pressure data.The peak altitude corresponds to the minimum pressure during the launch. From thedata, this occurs approximately 5642 seconds after the initial launch. With an ascentrate of 5 meters/second, this would give a peak altitude of about 92,500 feet.Marked regions of thedata were taken pastthe limit of the device’soperation.Finally, we also took temperature measurements from outside the payload. Thecalibration overcompensates slightly near the limit of its operation (-40 degreesCelsius), and since the temperature sensors were not shielded from sunlight there areoccasional spikes in the data. Although the temperature readings are inaccurate at thehigher altitudes, the oscillation can help us determine the period of rotation for thepayload. This can be used to help develop self-stabilizing components in the future.b. Roadmap for Technical DevelopmentBefore any additional launches, we can improve the performance of the individualcomponents of the payload. Mounting booms to the experiment ports can help isolatemore sensitive sensors or add separation between multiple GPS devices to preventinterference. We could also shield various sensors to increase the accuracy of theflight data (shielding temperature sensors from sunlight, for example). We havealready started modifying the GPS telemetry systems to provide more reliable, realtime GPS data through the Automatic Packet and Reporting System (APRS). Thiswould decrease the payload recovery time and provide necessary redundancies inretrieving GPS data.10
Although the reusable payload offered versatility and efficiency in payload construction,a truly modular design in which frames can be stacked together would facilitatepayload design, construction, and repair. With a dedicated core module housing theflight computer and telemetry systems, we could then add on various specializedmodules depending on the situation. Swapping out experiments would be much easiersince we would not have to rearrange the internal components of the core systems forevery flight. We could even launch multiple payloads in the same day by replacing thesurrounding modules after the payload is recovered.c. Current and Future ProjectsIn the immediate future, our group will be modifying our current payloads toaccommodate live telemetry through packet radio broadcasts. This will require moreexperimentation on range and power requirements. After these tests are completed,we plan on developing high altitude rocket platforms. We would have to design aremote launch system that could initiate a launch through a timer or altitude event, butit would require more in-flight failsafes before we could get FAA approval. Also, we willneed to improve the stabilization of the launch platform to achieve maximum efficiencyas well as for safety reasons.We also wanted to investigate the feasibility of a payload that would deploy from highaltitude and return to the launch coordinates through an on-board GPS. A returningpayload would allow us to set up a more permanent ground station where we couldmonitor the flight telemetry.V. ConclusionsWith the funding from the Keck Institute for Space Studies, our group has been able tomake incredible strides in our understanding of payload design. We learned how tomanage power resources to payload components and how to cope with stabilizationand weight limitations. We ran extensive tests on multiple types of mobile aerialphotography rigs and worked with members of JPL to conduct design experiments.We have researched multiple telemetry systems for GPS and live video feeds and willcontinue to do so.Overall, this project has expanded all of our horizons. We started with broken partsand Styrofoam scraps, but now we have the resources for a fully operational nearspace program. What we have learned from this project will lay the foundation formore advanced research.11
VI. AcknowledgmentsThere are many people and organizations that have helped us over the course of ourproject. We would like to thank Michele Judd, Tom Prince, and the rest of the KeckInstitute for Space Studies for their generous support of our program. We would alsolike to thank Fiona Harrison for mentoring our project, Julian Nott for his insight into thefield, Caprece Anderson, Debby Miles, and Nina Borg for their help managing accountsand ordering supplies, and John Leichty for introducing us to JPL and for hisconsiderable help and knowledge.Caltech High Altitude Ballooning Group:Robert Karolrobkarol@caltech.eduJoshua LeeJohn Leichtyjoshuawarrenlee@gmail.com jleichty@gmail.comAlexandre Boulgakovboulgako@caltech.eduAlice Xualicesbxu@gmail.comLisa Leelisalee star@yahoo.comBenjamin Razonbrazon@caltech.eduSara Ahmedsaahmed@caltech.eduRebekah Kittorkitto@caltech.eduZipeng Zhaozzhao@caltech.eduAnastasia Markovtsovaamarkovt@caltech.eduSeorim Songseorimsong@yahoo.comMelissa Zhangmzhang@caltech.eduLiana Braunlbraun@caltech.edu12
Arduino Uno microcontroller with a GPS logging shield to record precise GPS coordinates throughout the launch. The microcontroller was programmed in C to record GPS position data every second and to store it in an onboard SD memory card. This gave us a very detailed plot of the path the balloon traveled. This was necessary since the Spot messenger could only transmit coordinates every ten .