Transcription
SURVEILLANCE ROBOT USING RASPBERRY PI FORDEFENSE1Dr M Senthamil Selvi, 2M.Faesa Fathima, 3S.Dhivyuaa, 4S.Mouriya1Head of the Department,Department of Information Technology,Sri Ramakrishna Engineering College,2,3,4UG Scholar,Department of Information Technology,Sri Ramakrishna Engineering College.AbstractThe main objective behind this paper is todevelop a cost effective easy to controlsurveillance vehicle through remote desktopfor the implementation of military purpose.Since the risk factor in military border is toohigh causing threats to the lives of soldiers attime patrol by both climatic conditions andenemy nation which needs a replacement,that is done effectively by the surveillancevehicle that comprises the Raspberry Pi(small single-board computer), pi cameraand sensors. The information regarding thedetection of living objects by PIR sensor andimage capture of moving objects by picamera capture is posted inside the webpagesimultaneously. The movement of a robot isalso controlled automatically throughobstacle detecting sensors to avoiding thecollision, and the system causes an alert atthe time of metal detection through metaldetecting sensor. Since the system doesmultitask this can be used in surveillancepurpose.Keywords: Raspbian Pi, PIR sensor,Proximity Sensor, IR Sensor, PI Camera.I.INTRODUCTIONRobots can be classified into different typesbased on their environment and mechanism ofinteraction such as mobile and fixed robot ofwhich mobile robot can be further classified asaquatic, terrestrial and airborne. The terrestrialrobots are much in use and their applications arevast in each and every field, they are of twotypes (i) wheeled and (ii) legged each having adifferent use.Robots are being used in variety of industrialapplications for various activities like pick andplace, painting, assembling of subsystems andin hazardous places for material handling etc.Nowadays robots in the use of surveillance isemerging because of their miniature sizeallowing them to enter in tunnels, mines andsmall holes in building and also have capabilityto survive in harsh and difficult climaticconditions for life long time without any defectand causing no harm.This project’s main functionality is to deal withtough situations where human beings cannothandle situations like darkness, entering narrowand small places and detecting hidden bombsetc. Such hostile situation is occurring day byday in different parts of the world throughterrorist attack or in natural catastrophes. Thisdesigned system is connected to a remotecomputer wirelessly through which the wholecontrolling of the system response is done. Theproject is also designed to search invisible metalstuffs from where people are not capable toreach and it is so designed to work inenvironment where visible light will not beavailable.The proposed system consist of two unitsmainly a robotic unit and a remotely controlunit. The robotic unit is consisting of thewebcam, sensors and the heart of the project,raspberry pi along with the PCB containingmotor driven IC and voltage regulator circuitry.The rest of the paper is organized as follows:we review the related works in Section II.Section III presents about the surveillance robotin detail. Section IV, presents the conclusionand future work of the paper.II. RELATED WORKSService robots assist human beings, typically byperforming a job that is dirty, dull, distant,ISSN (PRINT): 2393-8374, (ONLINE): 2394-0697, VOLUME-6, ISSUE-3, 2019394
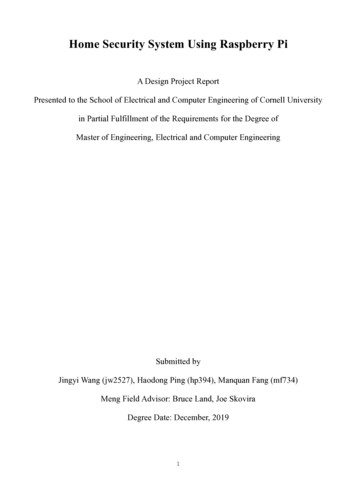
INTERNATIONAL JOURNAL OF CURRENT ENGINEERING AND SCIENTIFIC RESEARCH (IJCESR)dangerous or repetitive, includinghouseholdchores. They typically are autonomous and/oroperated by a built-in control system, withmanual override options. The InternationalOrganization for Standardization defines a“service robot” as a robot “that performs usefultasks for humans or equipment excludingindustrial automation applications”. Thesurveillance robot that is used in defense comesunder the service robot that does the dangerousjob. These robots are usually unmanned and areoperated by a remote desktopgenerally, thereare three kinds of unmanned machines used inthe military operations: Unmanned Ground Vehicle (UGV): They areused for ground purposes. They can carry heavyload, move on uneven terrains and have varioussensors and cameras fitted on them. Unmanned Aerial Vehicle (UAV): They areused to carry aerial weapons and flyingmachines. Unmanned Underwater Vehicle (UUV): Theyare submarines or machines, which can surveyunder water.These unmanned robots are equipped with thenecessary sensors and the motor system andthey are provided with a wireless cameras willsend back real time video and audio inputs thatcan be seen on a remote monitor in the basestation from where the robot is being controlled.These are widely used in battle field.III SURVEILLANCE ROBOTPROBLEM DEFINITION: Thesurveillancerobot is designed to be multitasking, costefficient and feasible machine that can beimplemented for the military purpose. Thesemachines replaces the Indian army soldiers anddogs that are used at the borders during the timeof war saving the lives from opponents orenemy nations and from environmentalcondition such as extreme cold and heat.These system consists of two unitsmainly a robotic unit and a remotely controlunit.The Robotic unit consists of amicrocontroller, the microcontroller here is theraspberry pi forming the central control of thesystem which is connected to a remote networkwirelessly and is controlled by a remote user.The system is driven by a motor and the powersupply is provided by a 12v battery. The systemis equipped by different sensor each of differentuse the IR sensor is used to sense the presenceof obstacles and it automatically redirects itsway in the obstacles, the PIR sensor detects thepresence of living objects in and around allthese are captured by a pi visioncamera, the system has metal detecting sensorwhich detects the presence of any metal thingsunderground angives an alert indicating thepresence of the metal and can be viewed on themonitor screen this forms the hardware part ofthe system .The software part is the web application whichdisplays the status of the IR, PIR and metaldetecting sensor and the images captured by thepi camera is displayed on the screen on thewebpage. The web application has a addedadvantage of storing the images captured andgives the detailed history of the picturescaptured before.3.1 SYSTEM DESIGN AND MODULEDESCRIPTIONFig 2.system designThe above figure describes the connections isthe system where the raspberry pi takes thecentral control and is connected to all thesensors, camera, motor and power supply. Thesystem can be divided into four modules whichare listed belowFig.1. Block diagram of the entire systemISSN (PRINT): 2393-8374, (ONLINE): 2394-0697, VOLUME-6, ISSUE-3, 2019395
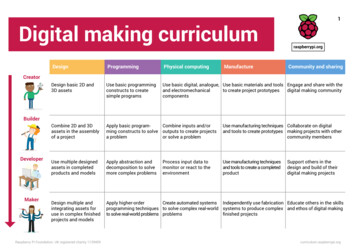
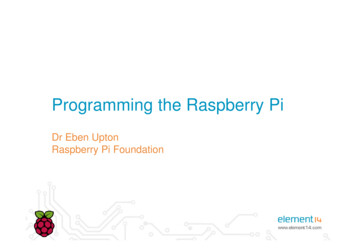
INTERNATIONAL JOURNAL OF CURRENT ENGINEERING AND SCIENTIFIC RESEARCH (IJCESR)SENSOR MODULEPIR SENSORThis sensor is used to detect the movement ofhuman beings in and around it. This emits theradiation and detects the heat and temperatureof the body and finds the object before itIR SENSORThis sensor is also used to detect the obstaclescoming on the both sides of the device anddetects the motion of the object. It does not emitthe radiation but it measures the radiation of theobject before it.PROXIMITY SENSORThis sensor is used to detect the metalobjects around it without having any Physicalcontact with them and it emits theelectromagnetic radiation and detects theobjectsCAMERA INTERFACE MODULEPI CAMERAThis vision sensor PI camera is used tocapture the images and motions of the objectbefore it and this is set on the top of the systemand it can be moved in and around to capturethe images in different locations and it sendsthose recordings to the web server for laterpurpose.RASPBERRY PIThis Raspberry pi board is used as aninterface between the software and hardwareand this has an inbuilt wireless controller andalso a Bluetooth controller which supports thePI camera and connects all the sensors with thesystem hardware.3.2 SYSTEM HARDWAREARaspberry pi 3connected designs.With its built-in wirelessconnectivity, the new Raspberry Pi is clearlypositioned as a low-cost hub for Internet ofThings devices, or as the flexible, low-costbasis of new types of connected gadgets. Thenew bump to a 2.5 amps power source means itwill be able to power more complex USBdevices without the need for a second powercable.B Infrared SensorFig.4. Infrared SensorInfrared Obstacle Avoidance Proximity SensorsModule has built-in IR transmitter and IRreceiver that sends out IR energy and looks forreflected IR energy to detect presence of anyobstacle in front of the sensor module. Themodule has on board potentiometer that letsuser adjust detection range. The sensor has verygood and stable response even in ambient lightor in complete darkness.The sensor module can be interfaced withArduino, Raspberry Pi or any microcontrollerhaving IO voltage level of 3.3V to 5V.C.PIR SensorFig 5.PIR SensorFig.3.raspberry pi 3The Raspberry Pi 3 Model B is the thirdgeneration Raspberry Pi. This powerful creditcard sized single board computer can be usedfor many applications and supersedes theoriginal Raspberry Pi Model B and RaspberryPi 2 Model B. Whilst maintaining the popularboard format the Raspberry Pi 3 Model B bringsyou a more powerful processer, 10x faster thanthe first generation Raspberry Pi. Additionally itadds wireless LAN & Bluetooth connectivitymaking it the ideal solution for powerfulPIR sensor detects a human beingmoving around within approximately 10m fromthe sensor. This is an average value, as theactual detection range is between 5m and12m.PIR are fundamentally made of a pyroelectric sensor, which can detect levels ofinfrared radiation. For numerous essentialprojects or items that need to discover when anindividual has left or entered the area. PIRsensors are incredible, they are flat control andminimal effort, have a wide lens range, and aresimple to interface with.Most PIR sensors have a 3-pinconnection at the side or bottom. One pin willISSN (PRINT): 2393-8374, (ONLINE): 2394-0697, VOLUME-6, ISSUE-3, 2019396
INTERNATIONAL JOURNAL OF CURRENT ENGINEERING AND SCIENTIFIC RESEARCH (IJCESR)be ground, another will be signal and the lastpin will be power. Power is usually up to 5V.Sometimes bigger modules don’t have directoutput and instead just operate a relay whichcase there is ground, power and the two er is very easy and simple. ThePIR acts as a digital output so all you need to dois listening for the pin to flip high or low. Themotion can be detected by checking for a highsignal on a single I/O pin. Once the sensorwarms up the output will remain low until thereis motion, at which time the output will swinghigh for a couple of seconds, then return low. Ifmotion continues the output will cycle in thismanner until the sensors line of sight of stillagain. The PIR sensor needs a warm-up timewith a specific end goal to capacity fittingly.This is because of the settling time included instudying nature’s domain. This could beanyplace from 10-60 secondsD. Proximity SensorA proximity sensor is a sensor able to detect thepresence of nearby objects without any physicalcontact. A proximity sensor often emits anelectromagnetic field or a beam ofelectromagneticradiation(infrared,forinstance), and looks for changes in the field orreturn signal. The object being sensed is oftenreferred to as the proximity sensor's target.output shaft rotates in a plastic bushing. Thewhole assembly is covered with a plastic ring.Gearbox is sealed and lubricated with lithiumgrease and require no maintenance.Fig 7.MotorThe motor is screwed to the gear box frominside. Although motor gives 500 RPM at 12Vbut motor runs smoothly from 4V to 12V andgives wide range of RPM, and torque. 500RPM12V DC geared motors for roboticsapplications. Very easy to use and available instandard size. Nut and threads on shaft to easilyconnect and internal threaded shaft for easilyconnecting it to wheelF. Motor DriverFig 6.Proximity SensorDifferent proximity sensor targets demanddifferent sensors. For example, a capacitiveproximity sensor or photoelectric sensor mightbe suitable for a plastic target; an inductiveproximity sensor always requires a metaltarget.Proximity sensors can have a highreliability and long functional life because ofthe absence of mechanical parts and lack ofphysical contact between the sensor and thesensed objectE. Motor500 RPM 12V DC Geared Motor is high qualitylow cost DC geared motor. It has steel gears andpinions to ensure longer life and better wear andtear properties. The gears are fixed on hardenedsteel spindles polished to a mirror finish. TheFig 8.Motor DriverL293D is a typical Motor driver or MotorDriver IC which allows DC motor to drive oneither direction. L293D is a 16-pin IC whichcan control a set of two DC motorssimultaneously in any direction. It means thatyou can control two DC motor with a singleL293D IC.It works on the concept of H-bridge.H-bridge is a circuit which allows the voltage tobe flown in either direction. As you knowvoltage need to change its direction for beingable to rotate the motor in clockwise oranticlockwise direction, Hence H-bridge IC areideal for driving a DC motor. In a single L293Dchip there are two h-Bridge circuit inside the ICISSN (PRINT): 2393-8374, (ONLINE): 2394-0697, VOLUME-6, ISSUE-3, 2019397
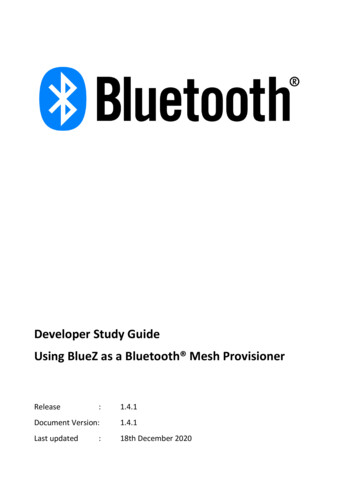
INTERNATIONAL JOURNAL OF CURRENT ENGINEERING AND SCIENTIFIC RESEARCH (IJCESR)which can rotate two dc motor independently.Due its size it is very much used in roboticapplication for controlling DC motors. Givenbelow is the pin diagram of a L293D motorcontroller. There are two Enable pins on l293d.Pin 1 and pin 9, for being able to drive themotor, the pin 1 and 9 need to be high. Fordriving the motor with left H-bridge you need toenable pin 1 to high. And for right H-Bridgeyou need to make the pin 9 to high. If anyone ofthe either pin1 or pin9 goes low then the motorin the corresponding section will suspendworking. It’s like a switch. 500 RPM 12V DCGeared Motor is high quality low cost DCgeared motor. It has steel gears and pinions toensure longer life and better wear and tearproperties. The gears are fixed on hardenedsteel spindles polished to a mirror finish. Theoutput shaft rotates in a plastic bushing. Thewhole assembly is covered with a plastic ring.Gearbox is sealed and lubricated with lithiumgrease and require no maintenance. The motoris screwed to the gear box from inside.Although motor gives 500 RPM at 12V butmotor runs smoothly from 4V to 12V and giveswide range of RPM, and torque. 500RPM 12VDC geared motors for robotics applications.Very easy to use and available in standardsize.Nut and threads on shaft to easily connectand internal threaded shaft for easily connectingit to wheel.3.3 SOFTWARE OF THE SYSTEMWEB PAGE ELEMENTSHTML provides the basic structure ofsites, which is improved and customized byother technologies like CSS and JavaScript.CSS is used to control presentation, layout andformatting. The commands can be sent throughthe web page with the help of internet. The usercontrol command can be sent from anywhere inthe world through web page. The robot iscontrolled from remote place which isolates thehuman being from dangerous environmentsPHP code may be executed witha command line interface (CLI), embeddedinto HTMLcode, or it can be used incombination with various web templatesystems, web content management systems,and web frameworks. PHP code is usuallyprocessed by a PHP interpreter implemented asa module in a web server or as a CommonGateway Interface (CGI) executable. The webserver combines the results of the interpretedand executed PHP code, which may be any typeof data, including images, with the generatedweb page. PHP can be used for manyprogramming tasks outside of the web context,here it controls the standalone graphicalapplications and robotic vehicle movement andsensor value displayThe entire system is based on aRaspbian operating system like Linux platform.The Raspbian OS is based on Debian thatoptimizes the Raspberry Pi hardware. Theprogramming language which is utilized forcoding is Python. Python referred to as a widelyused high-level programming language forgeneral-purpose programmingIt handles andcontrols the raspberry pi hardware performanceIV. CONCLUSION AND FUTURE WORKFig.9. Front view of robotThis paper presents an overview of the design,implementation, testing, and performance of aninnovativeroboticsurveillancevehiclecontrolled wirelessly by a remote user,developed for the purpose of directing themovement and detection of the living, nonlivingand metal objects and displaying statusfeedback to the operator through a webapplication.Since these robotsare implemented atthe border region they should be designed to bewater proof and should be able to loco mote inthe rugged surfaceAs they replace humans at the battleregion it is necessary that the robot will bedefense himself and protect our nation from theenemy. To make robot self-defense they can bedesigned to be equipped with a robot laser gun.Being a bomb disposal robot, it requires veryfast movement. This is required as the bombdisposal squad have very less time to defuse theISSN (PRINT): 2393-8374, (ONLINE): 2394-0697, VOLUME-6, ISSUE-3, 2019398
INTERNATIONAL JOURNAL OF CURRENT ENGINEERING AND SCIENTIFIC RESEARCH (IJCESR)bomb and save the life of the human’s.Therefore a fast robot is shall to be successful todispose the bomb.1.2.3.4.5.6.REFERENCESC. Micheloni, G. L. Foresti, C. Piciarelliand L. Cinque, "An AutonomousVehicle for Video Surveillance ofIndoorEnvironments,"inIEEETransactions on Vehicular Technology,vol. 56, no. 2, pp. 487498.W. F. Abaya, J. Basa, M. Sy, A. C.Abad and E. P. Dadios, "Low cost smartsecurity camera with night visioncapability using Raspberry Pi ndControl, Environment and Management(HNICEM), Palawan, 2014, pp. 1-6.Wi-Fi Robot for Video Monitoring &Surveillance System By Pavan C & Dr.B. Sivakumar, International Journal ofScientific & Engineering ResearchVolume 3, Issue 8, August2012.Arduino based Battlefield AssistiveRobotByAhsanulHoque,Md.BaijidHasanShorif, ogyconference (R10-HTC) 2017Z.Wang, M. Zhou and N. Ansari,"movement of the robot ," in proceedingof IEEE Conference on Man andCybernetics System Vol.4, pp.40454050, Washington DC, oct. 2003.M.SenthamilSelvi,N.SureshKumar “IntelligentSmartStreetLighting System for the public andsociety”, International Scientific GlobalJournal in Engineering, Science and7.8.9.10.11.12.Applied Research (ISGJESAR), Vol.1,No. 1, May 2016. pp. 18-28.The Robot control using the wirelesscommunicationandtheserialcommunication” By Jong HoonAhnn,Master of Engineering Thesis inElectrical and Computer EngineeringCornell University, 2007U. Bokade and V. R. Ratnaparkhe,"Video surveillance robot control usingsmartphone and Raspberry pi," 2016InternationalConferenceonCommunication and Signal Processing(ICCSP), Melmaruvathur, 2016, pp.2094-2097.Ewald, Hartmut&Krüger, Hendrik,“Inductive sensors and their applicationin metal detection”, 1st InternationalConference on Sensing Technology,Palmerston North, New Zealand,November 2123, 2005.S. Naskar, S. Das, A. K Seth, A. Nath.2011. Application of Radio FrequencyControlled Intelligent Military Robot inDefense. Communication Systems andNetworkTechnologies(CSNT),International Conference, art. 7-50.J. Zhang, G. Song, G. Qiao, T. Mengand H. Sun, "An indoor security systemwith a jumping robot as the surveillanceterminal," in IEEE Transactions onConsumer Electronics, vol. 57, no. 4, pp.1774-1781, November 2011.M. SenthamilSelvi, Mrs.S.Jansi Rani,M.FaesaFathima Presented a paper inNational Level Conference on AdvancesIn Materials Science And EngineeringFor Societal Applications titled “EnergyHarvesting sensors and its applications”from 18th& 20th July 2018 sponsored byDST -SERB and DRDO at SREC,Coimbatore.ISSN (PRINT): 2393-8374, (ONLINE): 2394-0697, VOLUME-6, ISSUE-3, 2019399
generation Raspberry Pi. This powerful credit-card sized single board computer can be used for many applications and supersedes the original Raspberry Pi Model B and Raspberry Pi 2 Model B. Whilst maintaining the popular board format the Raspberry Pi 3 Model B brings you a more powerful processer, 10x faster than the first generation Raspberry Pi.