Transcription
Designing Robot Collectivesby Kirstin PetersenJuly 2017Collective EmbodiedIntelligence Lab
MotivationJanuary 2004Collective EmbodiedIntelligence LabDistance to Mars: 34-250M milesTravel time: 39-289 daysCost: 1BApril 2009
Designing Robot CollectivesInstead of sending one, wecould send collectives! Robustness Efficiency CapabilityCollective EmbodiedIntelligence Lab
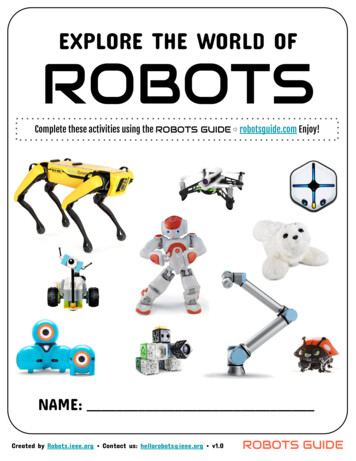
Robot CollectivesSuccess Stories!Collective EmbodiedIntelligence LabStill challenging to operate collectives to make capable, expendable robots to coordinate collectivesAmazon Robotics,automated warehouses1000Kilobots,Harvard,2014103 drones in flightDr. Timothy Chung, DARPA
Designing Robot CollectivesCollective EmbodiedIntelligence LabControlAutonomy/Taskability(Remote Controlled)(Exact number)Hardware(Stationary)ScalableHOLLISTIC TYERROR TOLERANCEError ToleranceCapabilityCostMaintenance
Designing Robot CollectivesCollective EmbodiedIntelligence LabSwarmSupportSystemsCoordinationin nisms
Designing Robot CollectivesCollective EmbodiedIntelligence LabSwarmSupportSystemsCoordinationin nisms
MacrotermesStudies with Dr. Paul Bardunias, Dr. Justin Werfel, Prof. RadhikaNagpal, Prof. Nils Napp, Prof. Scott Turner Decentralized Parallelism Simple agents Simple environment Error tolerant Guaranteed highlevel outcomeCollective EmbodiedIntelligence Lab
Termite-InspiredCollective ConstructionCollective EmbodiedIntelligence Lab with Dr. Justin Werfel and Prof. Radhika Nagpal, Harvard Decentralized Parallelism Simple agents Simple environment Error tolerant Guaranteed highlevel outcome
TERMES AlgorithmsCollective EmbodiedIntelligence Lab with Dr. Justin Werfel and Prof. Radhika Nagpal, Harvard internal rule set No gaps No cliffsuser input (blueprint)Arbitrary number of robotsOff-linecompiler stepgeneratestraffic patternscompiler outputdecentralized constructionWerfel, J, K Petersen, & R Nagpal. 2011. Distributed Multi-Robot Algorithms for the TERMES 3D CollectiveConstruction System. Workshop, Intl. Conference on Robots and Systems (IROS).
TERMES ImplementationCollective EmbodiedIntelligence Lab with Dr. Justin Werfel and Prof. Radhika Nagpal, HarvardLocomotionCo-Design& Error Fabrication10cmPetersen, Kirstin, Radhika Nagpal, and Justin Werfel. "Termes: An autonomous robotic system for threedimensional collective construction." Proc. Robotics: Science & Systems VII (2011).
TERMES Locomotion with Dr. Justin Werfel and Prof. Radhika Nagpal, HarvardCollective EmbodiedIntelligence Lab
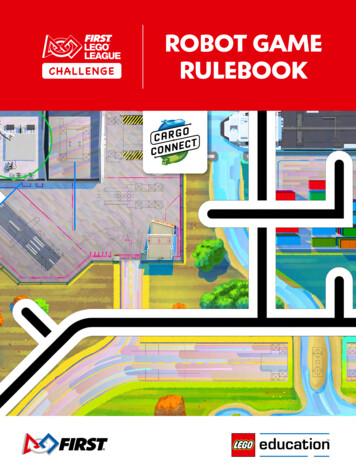
TERMES Navigation with Dr. Justin Werfel and Prof. Radhika Nagpal, Harvard 3 actuators Infrared (pattern recognitioning) Accelerometer (climbing) Tactile sensing (brick manipulation) Ultrasound (wall following/avoidance) Control by simple FSMCollective EmbodiedIntelligence Lab
TERMES SummaryCollective EmbodiedIntelligence Lab with Dr. Justin Werfel and Prof. Radhika Nagpal, HarvardMinimalist solution through embodied intelligence and error tolerant controlWerfel, J, K Petersen, & R Nagpal. 2014. Designing collectivebehavior in a termite-inspired robot construction team.Science 343(6172):754-758 (2014).
Designing Robot CollectivesControlCollective EmbodiedIntelligence LabAndreen, D, P. Jenning, N. Napp, and K. Petersen. 2016. Emergent StructuresAssembled by Large Swarms of Simple Robots. ACADIA // 2016, pp. 54-61.Autonomy/Taskability(Remote Controlled)(Exact number)ScalableError ance
Designing Robot CollectivesControlCollective EmbodiedIntelligence LabSpröwitz, A., Göttler, C., Sinha, A., Caer, C., Oztekin, M. U., Petersen, K., &Sitti, M. Scalable Pneumatic and Tendon Driven Robotic Joint Inspired byJumping Spiders. ICRA 2017.Autonomy/Taskability(Remote Controlled)(Exact number)ScalableError ance
Designing Robot CollectivesCollective EmbodiedIntelligence LabSwarmSupportSystemsCoordinationin nisms
Soft Robot CollectivesCollective EmbodiedIntelligence Lab Operation in unstructured terrain Resilient Inexpensive Compliant and safeD. discoideum (slime mold)Bonner, Princeton, 1984
Soft Robot CollectivesCollective EmbodiedIntelligence LabCompact, simple, soft actuator with large, stable, and repeatableshape changes.Dielectric Elastomer elastic MaterialsPressureHines*, L, Petersen*, K. and Sitti, M. (2016) Inflated Soft Actuatorswith Reversible Stable Deformations. Advanced Materials, 28(19),3690-3696.- "Asymmetric Stable Deformations in Inflated Dielectric ElastomerActuators.“ Intl. Conf. of Robotics and Automation, 2017. VSTABLESTATESVolume
Designing Robot CollectivesCollective EmbodiedIntelligence LabControlAutonomy/Taskability(Remote Controlled)(Exact number)ScalableError ance*Guestimates!
Collective EmbodiedIntelligence LabDaniel Kim, Ryan O’Hern, Claire Chen, Kirstin Petersen, Vaidehi Patel,Yanir Nulman, Aasta Gandhi, Asena Ulug, Yejing Wang, Tim Duggan,Owen Hua, Yawen Deng, Mateo Espinoza, and Lawrence Chen
Intelligence Lab. January 2004 April 2009 Distance to Mars: 34-250M miles. Travel time: 39 -289 days. . Termite-Inspired . Intelligence Lab. Collective Construction with Dr. Justin Werfel and Prof. Radhika Nagpal , Harvard . behavior in a termite -inspired robot construction team. Science 343(6172):754- 758 (2014). .