Transcription
An Introduction tothe Conjugate Gradient MethodWithout the Agonizing PainEdition 1 14Jonathan Richard ShewchukAugust 4, 1994School of Computer ScienceCarnegie Mellon UniversityPittsburgh, PA 15213AbstractThe Conjugate Gradient Method is the most prominent iterative method for solving sparse systems of linear equations.Unfortunately, many textbook treatments of the topic are written with neither illustrations nor intuition, and theirvictims can be found to this day babbling senselessly in the corners of dusty libraries. For this reason, a deep,geometric understanding of the method has been reserved for the elite brilliant few who have painstakingly decodedthe mumblings of their forebears. Nevertheless, the Conjugate Gradient Method is a composite of simple, elegant ideasthat almost anyone can understand. Of course, a reader as intelligent as yourself will learn them almost effortlessly.The idea of quadratic forms is introduced and used to derive the methods of Steepest Descent, Conjugate Directions,and Conjugate Gradients. Eigenvectors are explained and used to examine the convergence of the Jacobi Method,Steepest Descent, and Conjugate Gradients. Other topics include preconditioning and the nonlinear Conjugate GradientMethod. I have taken pains to make this article easy to read. Sixty-six illustrations are provided. Dense prose isavoided. Concepts are explained in several different ways. Most equations are coupled with an intuitive interpretation.Supported in part by the Natural Sciences and Engineering Research Council of Canada under a 1967 Science and EngineeringScholarship and by the National Science Foundation under Grant ASC-9318163. The views and conclusions contained in thisdocument are those of the author and should not be interpreted as representing the official policies, either express or implied, ofNSERC, NSF, or the U.S. Government.
Keywords: conjugate gradient method, preconditioning, convergence analysis, agonizing pain
Contents1. Introduction12. Notation13. The Quadratic Form24. The Method of Steepest Descent65. Thinking with Eigenvectors and Eigenvalues5.1. Eigen do it if I try 5.2. Jacobi iterations 5.3. A Concrete Example 9911126. Convergence Analysis of Steepest Descent6.1. Instant Results 6.2. General Convergence 1313177. The Method of Conjugate Directions7.1. Conjugacy 7.2. Gram-Schmidt Conjugation 7.3. Optimality of the Error Term 212125268. The Method of Conjugate Gradients309. Convergence Analysis of Conjugate Gradients9.1. Picking Perfect Polynomials 9.2. Chebyshev Polynomials 32333510. Complexity3711. Starting and Stopping11.1. Starting 11.2. Stopping 38383812. Preconditioning3913. Conjugate Gradients on the Normal Equations4114. The Nonlinear Conjugate Gradient Method14.1. Outline of the Nonlinear Conjugate Gradient Method 14.2. General Line Search 14.3. Preconditioning 42424347A Notes48B Canned AlgorithmsB1. Steepest Descent B2. Conjugate Gradients B3. Preconditioned Conjugate Gradients 49495051i
B4. Nonlinear Conjugate Gradients with Newton-Raphson and Fletcher-Reeves B5. Preconditioned Nonlinear Conjugate Gradients with Secant and Polak-Ribière 5253C Ugly Proofs Minimizes the Quadratic Form C1. The Solution toC2. A Symmetric Matrix Has Orthogonal Eigenvectors. C3. Optimality of Chebyshev Polynomials 54545455D Homework56ii
About this ArticleAn electronic copy of this article is available by anonymous FTP to WARP.CS.CMU.EDU (IP address128.2.209.103) under the filename quake-papers/painless-conjugate-gradient.ps. APostScript file containing full-page copies of the figures herein, suitable for transparencies, is availableas quake-papers/painless-conjugate-gradient-pics.ps. Most of the illustrations werecreated using Mathematica.c 1994 by Jonathan Richard Shewchuk. This article may be freely duplicated and distributed so long asno consideration is received in return, and this copyright notice remains intact.This guide was created to help students learn Conjugate Gradient Methods as easily as possible. Pleasemail me (jrs@cs.cmu.edu) comments, corrections, and any intuitions I might have missed; some ofthese will be incorporated into a second edition. I am particularly interested in hearing about use of thisguide for classroom teaching.For those who wish to learn more about iterative methods, I recommend William L. Briggs’ “A MultigridTutorial” [2], one of the best-written mathematical books I have read.Special thanks to Omar Ghattas, who taught me much of what I know about numerical methods, andprovided me with extensive comments on the first draft of this article. Thanks also to James Epperson,David O’Hallaron, James Stichnoth, Nick Trefethen, and Daniel Tunkelang for their comments.To help you skip chapters, here’s a dependence graph of the sections:1 Introduction10 Complexity2 Notation13 Normal Equations3 Quadratic Form11 Stop & Start4 Steepest Descent5 Eigenvectors7 Conjugate Directions6 SD Convergence8 Conjugate Gradients9 CG Convergence12 Preconditioning14 Nonlinear CGThis article is dedicated to every mathematician who uses figures as abundantly as I have herein.iii
iv
1. IntroductionWhen I decided to learn the Conjugate Gradient Method (henceforth, CG), I read four different descriptions,which I shall politely not identify. I understood none of them. Most of them simply wrote down the method,then proved its properties without any intuitive explanation or hint of how anybody might have invented CGin the first place. This article was born of my frustration, with the wish that future students of CG will learna rich and elegant algorithm, rather than a confusing mass of equations.CG is the most popular iterative method for solving large systems of linear equations. CG is effectivefor systems of the form (1) where is an unknown vector, is a known vector, and is a known, square, symmetric, positive-definite(or positive-indefinite) matrix. (Don’t worry if you’ve forgotten what “positive-definite” means; we shallreview it.) These systems arise in many important settings, such as finite difference and finite elementmethods for solving partial differential equations, structural analysis, circuit analysis, and math homework. Iterative methods like CG are suited for use with sparse matrices. If is dense, your best course of action is probably to factor and solve the equation by backsubstitution. The time spent factoring a dense is roughly equivalent to the time spent solving the system iteratively; and once is factored, the systemcan be backsolved quickly for multiple values of . Compare this dense matrix with a sparse matrix of larger size that fills the same amount of memory. The triangular factors of a sparse usually have many more nonzero elements than itself. Factoring may be impossible due to limited memory, and will betime-consuming as well; even the backsolving step may be slower than iterative solution. On the otherhand, most iterative methods are memory-efficient and run quickly with sparse matrices.I assume that you have taken a first course in linear algebra, and that you have a solid understandingof matrix multiplication and linear independence, although you probably don’t remember what thoseeigenthingies were all about. From this foundation, I shall build the edifice of CG as clearly as I can.2. NotationLet us begin with a few definitions and notes on notation.With a few exceptions, I shall use capital letters to denote matrices, lower case letters to denote vectors, and Greek letters to denote scalars. is an matrix, and and are vectors — that is, 1 matrices.Written out fully, Equation 1 is 1121. 1 1222 2 1 2 . 1 2 . . 1 .2 , and represents the scalar sum ! " # " " . Note thatvectors is written The % &inner . Ifproduct and ofaretwo 0. In general, expressions that reduce to1 1 1 matrices,orthogonal, then and ' ( , are treated as scalar values.such as
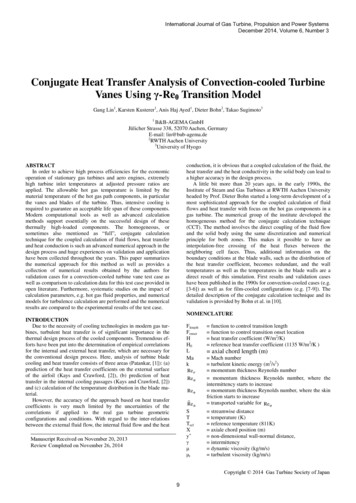
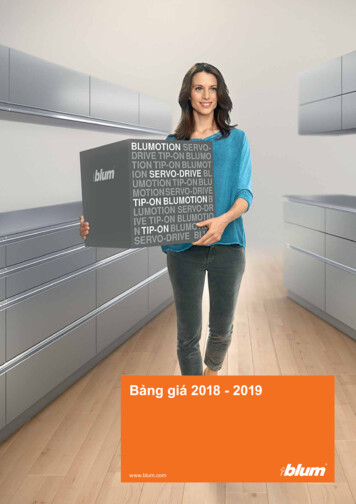
Jonathan Richard Shewchuk22423 1-2-4)2 22242-2 61)6 *218-4-6Figure 1: Sample two-dimensional linear system. The solution lies at the intersection of the lines.A matrix is positive-definite if, for every nonzero vector , -,0(2)This may mean little to you, but don’t feel bad; it’s not a very intuitive idea, and it’s hard to imagine howa matrix that is positive-definite might look differently from one that isn’t. We will get a feeling for whatpositive-definiteness is about when we see how it affects the shape of quadratic forms.Finally, don’t forget the important basic identities. 0/ 12 3 4/5 6and. 0/7198 1 4/:8 1 81.3. The Quadratic FormA quadratic form is simply a scalar, quadratic function of a vector with the form ; . 1 1 2 *? )A@(3)where is a matrix, and are vectors, and @ is a scalar constant. I shall show shortly that if .; 1and positive-definite, . is minimized by the solution to is symmetricThroughout this paper, I will demonstrate ideas with the simple sample problem 4 CB H I3 22 6D EF CB *28DGE@ 0 (4)The systemis illustrated in Figure 1. In general, the solution lies at the intersection point* 1. For this problem, the solution is % KJ 2 * 2L . Theof hyperplanes, each having dimensionM 1;; 1 is illustratedE in Figure 3.corresponding quadratic form .appears in Figure 2. A contour plot of .
The Quadratic Form3150; . 11004502 06024-2-40-2 21-6 -4Figure 2: Graph of a quadratic form N OQPSR . The minimum point of this surface is the solution to TUPWVYX . 242 -4-22461-2-4-6Figure 3: Contours of the quadratic form. Each ellipsoidal curve has constant N O PZR .
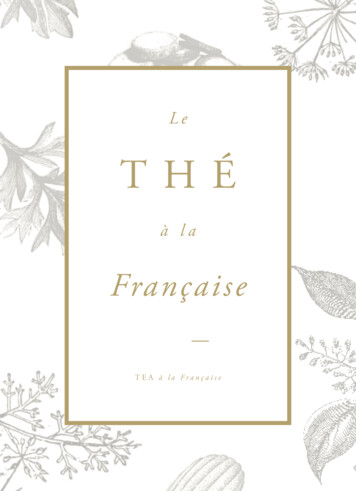
Jonathan Richard Shewchuk42642 -4-22461-2-4-6-8Figure 4: Gradient NZ[\O PZR of the quadratic form. For every P , the gradient points in the direction of steepestN O PZR , and is orthogonal to the contour lines. ; M1Because is positive-definite, the surface defined by .increase ofis shaped like a paraboloid bowl. (I’ll have moreto say about this in a moment.)The gradient of a quadratic form is defined to be ; . 1 ; 1 ; ] . M1 . (5) ;. M1a ab . ; 1The gradient is a vector field that, for a given point , points in the direction of greatest increase of . .Figure 4 illustrates the gradient vectors for Equation 3 with the constants given in Equation 4. At the bottom; 1; ] M1 equal to zero.of the paraboloid bowl, the gradient is zero. One can minimize . by setting .12With a little bit of tedious math, one can apply Equation 5 to Equation 3, and deriveIf ; ] . M1c is symmetric, this equation reduces to1 2 )1 :*?2; ] . M1c 4 d*?(6)(7)Setting the gradient to zero, we obtain Equation 1, the linear system we wish to solve. Therefore, the % e is a critical point of ; . M1 . If is positive-definite as well as symmetric, then thissolution to
The Quadratic Form(a)(b); . 1 2; . 1 11(d); . 1 2 2(c) 5; . 1 21 1Figure 5: (a) Quadratic form for a positive-definite matrix. (b) For a negative-definite matrix. (c) For asingular (and positive-indefinite) matrix. A line that runs through the bottom of the valley is the set ofsolutions. (d) For an indefinite matrix. Because the solution is a saddle point, Steepest Descent and CGwill not work. In three dimensions or higher, a singular matrix can also have a saddle.; M1 f H ; 1 solution is a minimum of . , socan be solved by finding an that minimizes . . (If is not 6 G1g Y h . Note thatsymmetric, then Equation 6 hints that CG will find a solution to the system 21 .)6 G 11is symmetric.).2 )Why do symmetric positive-definite matrices have this nice property? Consider the relationship between W 8 1 . From Equation 3 one can show (Appendix C1)at some arbitrary point i and at the solution point that if is symmetric (be it positive-definite or not),; If ; .ji 1 ; . M1)1.ji2*Y 1 .ji *k M1 4 is positive-definite as well, then by Inequality 2, the latter term is positive for all iYl;is a global minimum of .(8). It follows that; M1The fact that . is a paraboloid is our best intuition of what it means for a matrix to be positive-definite. If is not positive-definite, there are several other possibilities. could be negative-definite — the result of negating a positive-definite matrix (see Figure 2, but hold it upside-down). might be singular, in which; case no solution is unique; the set of solutions is a line or hyperplane having a uniform value for . If is none of the above, then is a saddle point, and techniques like Steepest Descent and CG will likely fail.Figure 5 demonstrates the possibilities. The values of and @ determine where the minimum point of theparaboloid lies, but do not affect the paraboloid’s shape.Why go to the trouble of converting the linear system into a tougher-looking problem? The methodsunder study — Steepest Descent and CG — were developed and are intuitively understood in terms ofminimization problems like Figure 2, not in terms of intersecting hyperplanes such as Figure 1.
6Jonathan Richard Shewchuk4. The Method of Steepest Descent mIn the method of Steepest Descent, we start at an arbitrary point 0n and slide down to the bottom of the m m until we are satisfied that we are close enough to theparaboloid. We take a series of steps 1 n E 2n Esolution .;When we take a step, we choose the direction in which decreases most quickly, which is the direction* ; ] . m " 1U o*Y m " .;] m 1opposite . " n . According to Equation 7, this direction isnnm q m *A "nAllow me to introduce a few definitions, which you should memorize. The error p " nis a s*t mm""vector that indicates how far we are from the solution. The residual r nindicateshowfarwenmu * m""are from the correct value of . It is easy to see that r nasp n , and you shouldm think v* ;of] . the m " residual1 , and youbeing the error transformed by into the same space as . More importantly, r " nnshould also think of the residual as the direction of steepest descent. For nonlinear problems, discussed inSection 14, only the latter definition applies. So remember, whenever you read “residual”, think “directionof steepest descent.” m wJx**Suppose we start at 0 n2 2L . Our first step, along the direction of steepest descent, will fallEsomewhere on the solid line in Figure 6(a). In other words, we will choose a point m 4 mm1n0 n )Ay r 0 nThe question is, how big a step should we take?(9);A line search is a procedure that chooses y to minimize along a line. Figure 6(b) illustrates this task:we are restricted to choosing a point on the intersection of the vertical plane and the paraboloid. Figure 6(c)is the parabola defined by the intersection of these surfaces. What is the value of y at the base of theparabola?; m 1;From basic calculus, y minimizes when the directional derivative z . 1n is equal to zero. By the; m 16 ; ] . m 1 z m ; ] . m 1 r m . Setting this expressionz {chain rule, z . 1nto zero, we find that y1n ;1 n11n0nm m]z { so that r 0n and z . { 1n are orthogonal (see Figure 6(d)).should be chosenThere is an intuitive reason why we should expect these vectors to be orthogonal at the minimum.Figure 7 shows the gradient vectors at various points along the search line. The slope of the parabola(Figure 6(c)) at any point is equal to the magnitude of the projection of the gradient onto the line (Figure 7,;;dotted arrows). These projections represent the rate of increase of as one traverses the search line. isminimized where the projection is zero — where the gradient is orthogonal to the search line.; ] . ( m 1 * r m , and we have1n1nr m 1 n r m 0 n . s*Y m 1n 1 r m 0n . o*Y . m 0n )Ay r m 0n 1}1 r m 0n . s*Y m 0n 1 r m 0n * y . r m 0n 1 r m 0n . s*Y m 0n 1 r m 0n r m 0 n r m 0 n To determine y , note thaty000 0 m 1 my . r 0n r 0nm m 1y r 0n . r 0nr m 0 n r m 0nr m 0n r m 0n
The Method of Steepest Descent27(a)(b)42 m-40n-2 p m 0n2-2 461501005001 2.5 02-4-2.5-5-6m 1; . m"n )Ay r " n(c) -2.502; . M 1 2.5 51(d)4140120100806040202-4 m-2-21n4261-4y0.2 0.4 0.6 -6Figure 6: The method of Steepest Descent. (a) Starting at j 2 2 , take a step in the direction of steepestNNdescent of . (b) Find the point on the intersection of these two surfaces that minimizes . (c) This parabolais the intersection of surfaces. The bottommost point is our target. (d) The gradient at the bottommost pointis orthogonal to the gradient of the previous step. 221 -2-11231-1-2-3Figure 7: The gradient NZ[ is shown at several locations along the search line (solid arrows). Each gradient’sprojection onto the line is also shown (dotted arrows). The gradient vectors represent the direction ofsteepest increase of , and the projections represent the rate of increase as one traverses the search line.On the search line, is minimized where the gradient is orthogonal to the search line.NN
Jonathan Richard Shewchuk8242 -2-4 m0n2-2461 -4-6Figure 8: Here, the method of Steepest Descent starts at j 2 2 9 2 and converges at 2.Putting it all together, the method of Steepest Descent is:r m " n U*? (m " n Emm " r m " n r " m ny n r m" r "n E (m " % (m " n m " r m "n )Ay n n1n(10)(11)(12)The example is run until it converges in Figure 8. Note the zigzag path, which appears because eachgradient is orthogonal to the previous gradient.The algorithm, as written above, requires two matrix-vector multiplications per iteration. The computational cost of Steepest Descent is dominated by matrix-vector products; fortunately, one can be eliminated.* and adding , we haveBy premultiplying both sides of Equation 12 byr m " 1n r m " n * y m " n r m " n(13)mAlthough Equation 10 is still needed to compute r 0 n , Equation 13 can be used for every iteration thereafter. The product r , which occurs in both Equations 11 and 13, need only be computed once. The disadvantageof using this recurrence is that the sequence defined by Equation 13 is generated without any feedback from m mthe value of " n , so that accumulation of floating point roundoff error may cause " n to converge to some point near . This effect can be avoided by periodically using Equation 10 to recompute the correct residual.Before analyzing the convergence of Steepest Descent, I must digress to ensure that you have a solidunderstanding of eigenvectors.
Thinking with Eigenvectors and Eigenvalues5. Thinking with Eigenvectors and Eigenvalues9After my one course in linear algebra, I knew eigenvectors and eigenvalues like the back of my head. If yourinstructor was anything like mine, you recall solving problems involving eigendoohickeys, but you neverreally understood them. Unfortunately, without an intuitive grasp of them, CG won’t make sense either. Ifyou’re already eigentalented, feel free to skip this section.Eigenvectors are used primarily as an analysis tool; Steepest Descent and CG do not calculate the valueof any eigenvectors as part of the algorithm1 .5.1. Eigen do it if I try//An eigenvector of a matrix is a nonzero vector that does not rotate when is applied to it (exceptperhaps to point in precisely the opposite direction). may change length or reverse its direction, but it/ . The value iswon’t turn sideways. In other words, there is some scalar constant such that /an eigenvalue of . For any constant y , the vector y is also an eigenvector with eigenvalue , because/ . 1c / . In other words, if you scale an eigenvector, it’s still an eigenvector.yyy/Why should you care? Iterative methods often depend on applying to a vector over and over" again."// When is repeatedly applied to an eigenvector , one of two thingscan happen. If S 1, then ", 1, then / will grow to infinity (Figure 10). Each will vanish as approaches infinity (Figure 9). If /time is applied, the vector grows or shrinks according to the value of . B2 vv B3 vBvFigure 9: is an eigenvector of with a corresponding eigenvalue of 0 5. As increases, \ convergesto zero.vBv B2 v B3 vFigure 10: Here, has a corresponding eigenvalue of 2. As increases, Q diverges to infinity.1However, there are practical applications for eigenvectors. The eigenvectors of the stiffness matrix associated with a discretizedstructure of uniform density represent the natural modes of vibration of the structure being studied. For instance, the eigenvectorsof the stiffness matrix associated with a one-dimensional uniformly-spaced mesh are sine waves, and to express vibrations as alinear combination of these eigenvectors is equivalent to performing a discrete Fourier transform.
/IfJonathan Richard Shewchukis symmetric (and often if it is not), then there exists a set of linearly independent eigenvectors/of , denoted 1 2 . This set is not unique, because each eigenvector can be scaled by an arbitraryE E Enonzero constant. Each eigenvector has a corresponding eigenvalue, denoted 1 2 . These areE E Euniquely defined for a given matrix. The eigenvalues may or may not be equal to each other; for instance,the eigenvalues of the identity matrix are all one, and every nonzero vector is an eigenvector of .10/What if is applied to a vector that is not an eigenvector? A very important skill in understandinglinear algebra — the skill this section is written to teach — is to think of a vector as a sum of other vectors" forms a basis for (because awhose behavior is understood. Consider that the set of eigenvectors a /symmetric has eigenvectors that are linearly independent). Any -dimensional vector can be expressedas a linear combination of these eigenvectors, and because matrix-vector multiplication is distributive, one/can examine the effect of on each eigenvector separately. / In Figure 11, a vector is illustrated as a sum of two eigenvectors 1 and 2 . Applyingto is/equivalentthe " eigenvectors, and summing the result. On repeated application, we" have/ " 4/ " to applying/ " " to/ willthan one, 1)21 1 ) 2 2 . If the magnitudes of all the eigenvalues are smaller/converge to zero, because the eigenvectors that compose converge to zero when is repeatedly applied. If one of the eigenvalues has magnitude greater than one, will diverge to infinity. This is why numericalanalysts attach importance to the spectral radius of a matrix:/ 1 . " " is an eigenvalue of / . E /1 If we want to converge to zero quickly, .should be less than one, and preferably as small as possible.max v 2v1B3 xBx B2 xxFigure 11: The vectorP(solid arrow) can be expressed as a linear combination of eigenvectors (dashedarrows), whose associated eigenvalues are 1 0 7 and 22. The effect of repeatedly applying tois best understood by examining the effect of on each eigenvector. When is repeatedly applied, oneeigenvector converges to zero while the other diverges; hence,also diverges. V VA \P PIt’s important to mention that there is a family of nonsymmetric matrices that do not have a full set ofindependent eigenvectors. These matrices are known as defective, a name that betrays the well-deservedhostility they have earned from frustrated linear algebraists. The details are too complicated to describe inthis article, but the behavior of defective matricescan be analyzed in terms of generalized eigenvectors and/ " convergesgeneralized eigenvalues. The rule thatto zero if and only if all the generalized eigenvalueshave magnitude smaller than one still holds, but is harder to prove.Here’s a useful fact: the eigenvalues of a positive-definite matrix are all positive. This fact can be provenfrom the definition of eigenvalue:/ / (/ is positive (for nonzero By the definition of positive-definite, the ). Hence, must be positive also.
Thinking with Eigenvectors and Eigenvalues115.2. Jacobi iterationsOf course, a procedure that always converges to zero isn’t going to help you attract friends. Consider a more 3 u . The matrix is split into two parts: , whoseuseful procedure: the Jacobi Method for solving diagonal elements are identical to those of , and whose off-diagonal elements are zero; and , whose .diagonal elements are zero, and whose off-diagonal elements are identical to those of . Thus,)We derive the Jacobi Method: * * 8 1) 8)/W )A E1where/ * 8 1 E 81(14)Because is diagonal, it is easy to invert. This identity can be converted into an iterative method byforming the recurrence m " /5 (m "(15)n )¡ 1n mGiven a starting vector 0 n , this formula generates a sequence of vectors. Our hope is that each successive vector will be closer to the solution than the last. is called a stationary point of Equation 15, because if m " % , then m " will also equal .1nnNow, this derivation may seem quite arbitrary to you, and you’re right. We could have formed any number of identities for instead of Equation 14. In fact, simply by splitting differently — that is,by choosing a different and — we could have derived the Gauss-Seidel method, or the method of/Successive Over-Relaxation (SOR). Our hope is that we have chosen a splitting for which has a smallspectral radius. Here, I chose the Jacobi splitting arbitrarily for simplicity. Suppose we start with some arbitrary vectorto the result. What does each iteration do? m0n . For each iteration, we apply/to this vector, then addAgain, apply the principle of thinking of a vector as a sum of other, well-understood vectors. Express m meach iterate " n as the sum of the exact solution and the error term p " n . Then, Equation 15 becomes m " 1n /W m "/ . n )Ap m " 1) m /W ) n / ¡p "n )A/ p m )"(by Equation 14))nE p m " 1n / p m " n(16) m Each iteration does not affect the “correct part” of " n (because is a stationary point); but each iteration/ 1 1, then the error term p m " willdoes affect the error term. It is apparent from Equation 16 that if .n mconverge to zero as approaches infinity. Hence, the initial vector 0 n has no effect on the inevitableoutcome! (m Of course, the choice of 0 n does affect the number of iterations required to converge to within/ 1a given tolerance. However, its effect is less important than that of the spectral radius . , which/determines the speed of convergence. Suppose that a is the eigenvector of with the largest eigenvalue/ 1 ). If the initial error p m , expressed as a linear combination of eigenvectors, includes a(so that .0ncomponent in the direction of , this component will be the slowest to converge.
Jonathan Richard Shewchuk12242 -2-424617-22-4-6Figure 12: The eigenvectors ofTare directed along the axes of the paraboloid defined by the quadraticform. Each eigenvector is labeled with its associated eigenvalue. Each eigenvalue is proportional tothe steepness of the corresponding slope.N OQPSR/ is not generally symmetric (even if is), and may even be defective. However, the rate of convergence/71 of the Jacobi Method depends largely on . , which depends on . Unfortunately, Jacobi does not converge for every , or even for every positive-definite .5.3. A Concrete ExampleTo demonstrate these ideas, I shall solve the system specified by Equation 4. First, we need a method offinding eigenvalues and eigenvectors. By definition, for any eigenvector with eigenvalue ,Eigenvectors are nonzero, so *Y ' .§ ' *YG 1 0must be singular. Then,det .§ ' *? G1c 0* The determinant of is called the characteristic polynomial. It is a degree polynomial in whose roots are the set of eigenvalues. The characteristic polynomial of (from Equation 4) is* 3 * 2 *B * 2 * 6 D 2 9 )det .§ * 71 §. * 21E and the eigenvalues are 7 and 2. To find the eigenvector associated with 7,* 2 B Y*G 1C B4* 2 1 D 1D 0.§ 2 4 1 * 2 2 014
Convergence Analysis of Steepest Descent13 JxJ*Any solution to this equation is an eigenvector; say, 1 2L . By the same method, we find that 2 1LEEis an eigenvector corresponding to the eigenvalue 2. In Figure 12, we see that these eigenvectors coincidewith the axes of the familiar ellipsoid, and that a larger eigenvalue corresponds to a steeper slope. (Negative;eigenvalues indicate that decreases along the axis, as in Figures 5(b) and 5(d).)Now, let’s see the Jacobi Method in action. Using the constants specified by Equation 4, we have m " 1n * B m" BDD n)* 2 m B 2" n ) * 3430 D3 D13016B *013/Jj B00 22 0130016* B *28 DDJx* The eigenvectors ofare 2 1L with eigenvalue2 ª 3, and2 1L with eigenvalue 2 ª 3. EEThese are graphed in Figure 13(a); note that they do not coincide with the eigenvectors of , and are notrelated to the axes of the paraboloid.Figure 13(b) shows the convergence of the Jacobi method. The mysterious path the algorithm takes canbe understood by watching the eigenvector components of each successive error term (Figures 13(c), (d),and (e)). Figure 13(f) plots the eigenvector components as arrowheads. These are converging normally atthe rate defined by their eigenvalues, as in Figure 11.I hope that this section has convinced you that eigenvectors are useful tools, and not just bizarre torturedevices inflicted on you by your professors for the
1. Introduction 1 2. Notation 1 3. The Quadratic Form 2 4. The Method of Steepest Descent 6 5. Thinking with Eigenvectors and Eigenvalues 9 5.1. Eigen do it if I try 9 5.2. Jacobi iterations 11 5.3. A Concrete Example 12 6. Convergence Analysis of Steepest Descent 13 6.1. Instant Results 13 6.2. General Convergence 17 7. The Method of Conjugate .