Transcription
Struct Multidisc OptimDOI 10.1007/s00158-009-0423-zBIOMECHANICAL APPLICATIONPredictive dynamics: an optimization-based novel approachfor human motion simulationYujiang Xiang · Hyun-Joon Chung · Joo H. Kim ·Rajankumar Bhatt · Salam Rahmatalla ·Jingzhou Yang · Timothy Marler ·Jasbir S. Arora · Karim Abdel-MalekReceived: 10 June 2008 / Revised: 15 May 2009 / Accepted: 23 July 2009c Springer-Verlag 2009 Abstract Predictive dynamics is a novel approach forsimulating human motion. It avoids direct integrationof differential-algebraic equations in order to create theresulting simulations for redundant digital human models.Instead, it formulates an optimization problem by defining appropriate performance measures and constraints torecover the real motion of the dynamic system. In the formulation, both kinematics and kinetics parameters serve asunknowns, and equations of motion are treated as equality constraints. Procedures to choose physical performancemeasures and appropriate constraints based on the available information about the bio-system are presented. Theproposed methodology is illustrated and studied by firstpredicting the swinging motion of a single pendulum withexternally applied torque. The pendulum can represent themotion of upper and lower extremities. This simple problem has analytical solutions and is used to gain insights forthe predictive dynamics approach. In addition, a complexhuman walking task is simulated by using the approach,and realistic results are obtained. Such motion predictioncapabilities have a wide variety of applications for industries ranging from automotive to military to clinical analysisand design.Y. Xiang · H.-J. Chung · J. H. Kim · R. Bhatt · S. Rahmatalla ·J. Yang · T. Marler · J. S. Arora (B) · K. Abdel-MalekVSR/CCAD/College of Engineering, The University of Iowa,Iowa City, IA 52242, USAe-mail: jasbir-arora@uiowa.eduY. Xiange-mail: yujxiang@engineering.uiowa.eduK. Abdel-Maleke-mail: amalek@engineering.uiowa.eduKeywords Predictive dynamics · Optimization ·Human motion simulation · Forward dynamics ·Inverse dynamics · Single pendulum · Walking1 IntroductionThe problem of dynamic analysis of mechanical systemsis classified in two ways: forward dynamics and inversedynamics. Forward dynamics starts with the known appliedforce and solves for the unknown response by integratingdifferential equations of motion. Inverse dynamics startswith the known response and solves for the unknown forceby directly evaluating equations of motion. However, formany dynamic systems, especially bio-systems, both forcesand response are unknown. This is quite common in thestudy of human motion. Besides boundary conditions andsome system response, joint angle profiles and torque profiles as well as ground reaction forces are all unknown. Insuch cases, the concept of predictive dynamics can be usedto solve the problem. The basic idea is to use optimizationmethods to reveal force and response histories based on theavailable information about the dynamic system.Dynamic motion prediction is a challenging problembecause the equations of motion (EOM) are nonlinearand cannot be solved in a closed form. Robust nonlinearprogramming algorithms (NLP) have been developed andapplied to solve the motion prediction problem. Inversedynamics is usually adopted in the optimization formulation so that integration of the equations of motion is avoided.Sensitivity of the nonlinear dynamics equations with respectto the state variables is needed in the optimization processto solve the problem efficiently and accurately. Sohl andBobrow (2001) developed a sensitivity algorithm of recursive Newton–Euler equations for branched or tree-topology
Y. Xiang et al.systems. Kim et al. (1999) presented a class of Newtontype algorithms to analytically compute both the first andsecond derivatives of the dynamics equations with respectto arbitrary joint variables. Xiang et al. (2009a) carriedout sensitivity analyses for dynamic motion prediction ofa mechanical system by using the recursive Lagrangianformulation.Recently, dynamic motion planning of digital humanshas been solved using optimization, which requires sensitivity analysis of dynamics equations. Forward dynamics canbe used to solve equations of motion in modeling humanmotion (Roussel et al. 1998; Chevallereau et al. 1998;Anderson and Pandy 2001a). Anderson and Pandy (2001b)presented a model with 23 degrees of freedom (DOF) and54 muscles for normal symmetric walking on level ground.The objective function was metabolic energy per unit distance, and the design variables were the muscle actuations.Equations of motion of the bio-system were integratedat each iteration in the optimization process. The parallel computation techniques were used to evaluate gradientsby finite differences. The initial walking postures obtainedfrom experiments were imposed as constraints in the formulation so that accurate kinetics data were recovered fromthe simulation. However, this approach suffers from highcomputation cost and use of the motion capture data.To circumvent these difficulties, alternative formulationsmay be used for the optimization problem, in which bothforces and joint state variables are treated as unknowns.Equations of motion are either evaluated using inversedynamics or simply imposed as equality constraints (Kimet al. 2008; Wang et al. 2007). Lo et al. (2002) presenteda framework for human motion prediction incorporatinginverse recursive Newton–Euler equations with analyticalgradients. Saidouni and Bessonnet (2003) used optimization to solve for cyclic, symmetric gait motion of a 9-DOFmodel that moves in the sagittal plane; the control pointsfor the B-spline curves along with the time durations forthe gait stages were optimized to minimize the actuatingtorque energy. Xiang et al. (2009b) presented the dynamichuman walking prediction by using a 55-DOF skeleton digital human model. The joint angle profiles were treated asdesign variables, and the dynamic effort was minimizedto generate the optimal symmetric walking motion. Thesimulation results matched well with the joint angle profiles, joint torques, and ground reaction forces obtainedfrom experiments.Optimization-based motion prediction has been widelyused in biomechanics to synthesize control strategies, analyze muscle forces, predict optimal motion, and so on. However, the performance measure and necessary constraints arecritical issues for predictive dynamics to simulate humanmotion. Marler et al. (2008) overviewed the computationalapproaches in digital human modeling. Schiehlen (1997)gave a review of multibody system dynamics in whichoptimal design of a mechanical system was discussed, especially the multicriteria optimization approach. Leboeuf et al.(2006) compared two performance criteria: the minimumeffort cost and the minimum energy cost for predictinghuman handstand motion. It was concluded that the formertended to generate more natural motion and the latter gave asmoother motion. Vukobratović et al. (2007) derived a general model to simulate human and humanoid motions. Thehuman was treated as a free spatial system, and particulartasks were considered as different contact problems betweenthe human model and various objects. Bottasso et al.(2006) proposed a computational procedure for inferringcost functions that underlie the experimentally observedhuman strategies. Although many performance measureshave been studied for human motion prediction, there is limited work on constructing constraints for a bio-system forthe optimization formulation.The basic purpose of the present study is to propose andinvestigate the predictive dynamics approach for simulationof motion of bio-systems. General concepts associated withthe proposed approach are presented and discussed. Theapproach is applied and analyzed by solving a single pendulum problem subjected to a sinusoidal external torque.The pendulum can model the motion of upper and lowerextremities of humans. This simple example has analytical solutions and is used to gain insights for the predictivedynamics approach. Various performance measures are formulated and tried in order to study their performance. Theapproach is then used to simulate the walking motion ofdigital human models having many degrees of freedom todemonstrate its applicability to more complex problems.In Sections 2, 3, 4 and 5, general concepts and proceduresassociated with the predictive dynamics approach are presented. These are then demonstrated on a simple examplein Section 6. Several cases are studied to gain insights forthe proposed approach. In Section 7, the approach is used tosimulate the walking motion of a full 3D skeletal model ofthe human body. Finally, discussion and conclusions basedon the study are presented in Section 8.2 Predictive dynamicsPredictive dynamics is defined as a general optimizationapproach for human motion prediction with unknown forcesand response (state) variables. The basic idea is to modela redundant dynamical system as an optimization problemand to solve for its motion where only limited informationabout the system is available. Both the motion and the forcesthat cause the motion are unknown and treated as designvariables in the optimization process. Equations of motionare treated as equality constraints instead of their direct
Predictive dynamics: an optimization-based novel approach for human motion simulationq f –1 (τ , t)qFig. 3 Constraints for a bio-systemqτ f (q, t)Fig. 1 Flowcharts a forward dynamics and b inverse dynamicsnumerical integration. The optimization problem is usuallya large-scale nonlinear programming problem with manydesign variables and constraints. To solve the problem efficiently, modern optimization methods that take advantageof the structure of the problem need to be used.The studied bio-system is represented as S and the corresponding mathematical model as M . The general equationsof motion for the model M are written as: f q, q̇, q̈, t τaccuracy. However, the boundary conditions and some stateresponse of the system might be available. In this case, neither forward dynamics nor inverse dynamics can be appliedto the bio-system S directly. As a consequence, the predictive dynamics procedure is proposed to solve these typesof problems. The basic idea is to formulate a nonlinearoptimization problem based on the physics of motion (thedynamics of the motion). An appropriate performance measure (objective function) for the bio-system is defined andminimized subject to the available information about thesystem that imposes various constraints. Thus the predictive dynamics approach is formulated for the system M asfollows:minJ (q, τ , t)s.t. :τ f (q, t) 0q,τg (ϒ) 0(1)(2)q q qLwhere q, q̇, q̈ R N are the state variables, and τ R N arethe generalized forces. This dynamics problem is definedover the time domain (T0 , T ) with boundary ·{T0 , T } , t , t being the time and the symbol (·) indicating derivative with respect to t. The superscript N representsthe number of DOF of model M .Forward dynamics calculates the motion (q, q̇, and q̈)from the force τ by integrating (1) with the specified initial conditions. In contrast, inverse dynamics computes theassociated force τ that leads to a prescribed motion for thesystem. The two procedures are depicted in Fig. 1. Forsimplicity, we use only q to represent kinematics of thesystem.In practice, it is difficult to measure complete displacement (q) and force (τ ) histories accurately for a bio-systemwith many DOFs, especially involving a complex motion.This is because the experimental measurement is either notaccurate enough or too expensive to achieve the requiredUτ L τ τUwhere g are the constraints defined based on the availableinformation ϒ about the system S. q and τ are subjectto their lower and upper bounds, respectively. For thebio-system, the objective function is usually called the performance measure. The flowchart of predictive dynamics isshown in Fig. 2.Two challenging problems arise naturally for the predictive dynamics approach: (1) the functional form of theperformance measure is unknown; and (2) the constraintsare undetermined. Before turning to these two importantissues, the evaluation criterion for predictive dynamics isfirst proposed, i.e., how to validate the predictive dynamicssolution of model M with that of the real system S.Table 1 Four cases of swing motion examined by predictive dynamicsMotionCaseAvailable informationSimple swing without1Boundary conditions2Boundary conditions3Boundary conditions andoscillationOscillating motionresponse at one time point4Boundary conditions andresponse at two time pointsFig. 2 Flowchart of predictive dynamics
Y. Xiang et al.Fig. 4 Single pendulumyoτxqlchosen as determinants to define a specific motion such aswalking and running. For walking motion, the six determinants correspond to the lower extremities and pelvic motion(Saunders et al. 1953). Therefore, instead of using all thejoint angle and torque profiles in (3), only the determinantand torque profiles may be used in (3) to validate the task.Furthermore, the predictive dynamics structure has veryflexible optimization formulation in terms of constraints andperformance measures for dynamic human motion prediction. For instance, the constraints allow one to model theboundary conditions and state response of the problem, andthe performance measure allows one to study what driveshuman motion. However, this assumes that the performancemeasure represents a physically significant quantity, not justa curve fit to predetermined data. Therefore, once the simulation model is validated, it can be used to show causeand effect, study an injury problem, analyze pathologicalmotion, and so on.mgSuppose q and τ represent the natural motion of thebio-system S. One way to quantify the accuracy of the predictive dynamics solution for the bio-system is to evaluatethe percentage error of the residuals of the predicted forceand displacement histories using a norm, as follows: T q̄ q τ̄ τ dt0ε T q τ dt(3)0where q̄ and τ̄ are optimal values obtained from the predictive dynamics in (2); T is the total time.For human motion validation, some well studiedkinematics variables (angles and displacements) have beenFig. 5 Forward dynamicssolved by ADAMS3 Performance measuresThe unknown performance measure needs to be identifiedfirst. Two basic methods are available: one is the trialand-error method, and the other is the inferring method,which requires more insight into the physical process of thebio-system.3.1 Trial-and-errorThe trial-and-error method enumerates the hypothesizedperformance function J to solve the predictive dynamicsproblem in (2). Then the error in (3) is checked with thereal solution that is obtained from either the exact analytical
Predictive dynamics: an optimization-based novel approach for human motion simulation0-5Joint velocity (rad/s)solution or an experiment with sufficiently small error. Oncethe error is in an acceptable small range, the correspondingfunction J is treated as the performance measure for predictive dynamics. However, this is a trial-and-error process,with no guarantee of success.In practice, the performance set includes many differentkinematics and dynamics criteria such as time minimization,effort minimization, energy minimization, jerk minimization, and so on. However, a performance measure that iswell studied in the biomechanics literature is often used tonarrow down the trial-and-error process; for example, minimizing the squares of all actuating torques or minimizingthe maximum torque for all joints.-10-15Torque squareConstantMin-maxMinimum timeForward dynamics-20-25-300.03.2 Inner optimization0.10.20.30.4Time (s)An alternative way to detect the performance measure isto use the inner optimization (nested optimization) method.The basic idea is to construct a local search space ofcost functions S J with a specific functional form basedon some insight into the physical processes governing thebio-system.SJ q, τ , t p J (q, τ , t)(4)where p is the parameter vector that needs to bedetermined.For instance, a performance measure for the bio-systemhas been identified as the sum of squares of all joint torqueswith coefficients p as in (5).S J (q, τ , t p ) T nτ0pi τi2 dt(5)i 10.0Joint angle (rad)wherenτ pi 1 and pi 0(6)i 1The parameters p are determined by solving the inneroptimization problem as defined in (7) so that the exactperformance measure can be identified.minpεs.t. : h (p) 0min S J (q, τ , t p )q,τs.t. : τ f (q, t) 0g(ϒ) 0q L q qUτ L τ τU(7)where h(p) 0 are the possible equality or inequality constraints on the parameters p satisfying the normalization andnon-negativity conditions. ε is the error defined in (3). Theprocess of identifying the unknown performance measure istransformed to find the parameters p that will minimize theerror ε.-0.5-1.0-1.5Torque squareConstantMin-maxMinimum timeForward dynamics-2.0-2.50.0Fig. 7 Joint velocity prediction of the single pendulum, Case 10.10.20.3Time (s)Fig. 6 Joint angle prediction of the single pendulum, Case 14 Constraints0.4Constraints are formulated based on the available information ϒ about the bio-system. In general, two types of constraints are included in this set: (a) boundary conditions, and(b) available state response at some time points q t j , t j , obtained from either experiments or observations. In
Y. Xiang et al.0.12The solution of (8) implies that the output set (q f , τ f )satisfies all linear and nonlinear constraints, but does notoptimize any performance measure for the bio-system. Thisis a feasible solution of the predictive dynamics problem.There are two purposes of obtaining a feasible solution forthe system: one is to test the feasibility of all the constraints,and the other is to get a solution that might be used as a goodinitial guess for the predictive dynamics with a physicalperformance measure.0.100.08Joint torque (Nm)0.060.040.020.00Torque squareMin-maxForward dynamics-0.02-0.04-0.064.2 Minimal set of constraints-0.08-0.100.00.10.20.30.40.5Time (s)Fig. 8 Joint torque prediction of the single pendulum, Case 1addition, boundary conditions consist ofboundary timeqt j , t j , and geometrical boundary X qt j , t j ,where X represents the global Cartesian coordinates thatcapture the geometrical environment for the bio-system. Forexample, given initial and final postures, a walking taskis performed to predict the walking motion between thetwo postures. The initial and final postures are the timeboundaries, and the ground is formulated as a geometrical boundary. However, there are many options for stateresponse constraints based on available information aboutthe walking motion, such as transition posture between single support and double support phases, knee flexion angleat mid-swing time point, etc. The overall set of constraintsis depicted in Fig. 3.It is obvious that the more information about the bio-systemis available, the more accurate the predictive dynamics solution is. As an extreme case, all the displacement and forcehistories can be available in the time domain . However, in most cases, only minimal information about thebio-system is available so that predictive dynamics seeksfor the minimal constraint set g (ϒminimal ) and an appropriate performance measure to simulate the applied force andresponse histories for the bio-system, as follows:J (q, τ ,t)minq,τs.t. : τ f (q, t) 0g (ϒminimal ) 0q L q qUτ L τ τU(9)The minimal constraint set depends on the complexity ofthe bio-system and the motion to be simulated. For a1.04.1 Feasible set0.5minq,τJ (q, τ , t) cs.t. : τ f (q, t) 0g(ϒ) 0q L q qUτ L τ τUwhere c is a constant.Torque squareMin-maxForward dynamics0.0Joint angle (rad)The feasible set of solutions for the problem is an importantissue for predictive dynamics. An infeasible set will resultin a null solution space for the system. This situation shouldalways be avoided while formulating a predictive dynamicsproblem. For a bio-system, feasibility of all the constraintscan be tested by solving the predictive dynamics problemwith a constant objective function as 1.01.21.41.61.8Time (s)Fig. 9 Joint angle prediction of the single pendulum, Case 22.0
Predictive dynamics: an optimization-based novel approach for human motion simulation1.61.41.2Joint torque (Nm)simple motion, boundary conditions alone might be enoughto reveal the entire motion; in this case, the minimal constraint set includes only boundary conditions. In contrast,for a complex motion, some state responses between theboundaries need to be known to simulate the real motion.Therefore, these state responses have to be included in theminimal constraint set.Torque squareMin-maxForward dynamics1.00.80.60.40.25 Discretization and scaling0.0-0.2The predictive dynamics problem in (2) is actually an optimal control problem with boundary conditions and somestate constraints. The classical method to solve the optimal control problem is to derive the optimality conditionfor the continuous variable optimization problem. However, beyond boundary conditions, the continuous methodhas difficulty dealing with discrete state constraints. Themost efficient way to solve a complex optimal control problem is to use nonlinear optimization techniques. The basicidea is to discretize the governing equations of motionusing a suitable numerical method and define finite dimensional approximation for the state and control variables.This process transforms the system differential equationsinto algebraic equations with parametric representation ofthe state and control variables. The performance measuresand the constraints are also evaluated in terms of discretestate and control values. Therefore, the original optimalcontrol problem is transformed into a nonlinear programming (NLP) problem.8Torque squareMin-maxForward dynamicsJoint velocity .0Time (s)Fig. 11 Joint torque prediction of the single pendulum, Case 2The time domain is first discretized into n intervals withstep size h i , as follows:0 t0 t1 · · · tn 1 tn T and h i ti 1 ti(10)The discretized state qh and force τ h can be expressed interms of interpolating functions and discrete nodal degreesof freedom (control points) Pq and Pτ . qh q Pq , h ;τ h τ (Pτ , h)(11)Thus, the discretized predictive dynamics problem is formulated as: min J qh , τ h , thq,τ s.t. : τ h f qh , th 0(12)g(ϒh ) 0LUq qh qτ L τh τUIn general, all the unknowns and the equations of motionshould be scaled to improve the numerical performance ofthe nonlinear optimization solver. Appropriate scale factorss are chosen so as to obtain quantities that have the samemagnitude order O (1). It is noted that scaling of a constraintdoes not change the constraint boundary, so it has no effecton the optimum solution.-6-8 J s q qh , s τ τ h , s t th s.t. : s τ τ h f s q qh , s t th 0g (ϒh ) 0s q q L s q qh s q qUsτ τ L sτ τ h sτ τ Uminq,τ-100.00.20.40.60.81.01.21.41.61.8Time (s)Fig. 10 Joint velocity prediction of the single pendulum, Case 22.0(13)
Y. Xiang et al.6 Numerical example: single pendulum8lI q̈ mg cos q Time (s)Fig. 13 Joint velocity prediction of the single pendulum, Case 3(14)where I is the moment of inertia, m is the mass, l is thelength, q is the joint angle, and τ is the external torque.The external torque is assumed to be a sinusoidal functiongiven as(Nm)(15)The geometrical and physical parameters of the rigid bar aretaken as I 0.0267 kg m2 , m 0.5 kg, and l 0.4 m. Withthe initial condition q(0) 0 and q̇ (0) 0, the forwarddynamics is solved by the ADAMS Runge–Kutta solver, asshown in Fig. 5, which is considered the true solution of thesystem.1.06.2 Simple swing motion with boundary conditionsThe swinging motion without oscillation is studied withthe initial and final conditions. The total time is randomlyselected as T 0.43 s (less than first half period of oscillation), and the single pendulum starts at rest in the horizontalposition and ends up with the final conditions that areobtained from Fig. 5 as q(T ) 2.40 rad and q̇ (T ) 5.86 rad/s. The swinging motion is driven by the externaltorque and gravity. Besides boundary condition and totaltravel time T , neither external torque nor joint angle isknown. Therefore, the predictive dynamics problem is formulated as in (16) to reveal the natural swing motion of thesingle pendulum.J (q, τ, t)lSubject to I q̈ mg cos q τ2q (0) 0, q̇ (0) 0q (T ) 2.40, q̇ (T ) 5.86, T 0.43 π q π 10 τ 10Minimize0.5Torque squareMin-maxForward dynamics0.0Joint angle (rad)Joint velocity (rad/s)The natural swinging motion of a single pendulum subjectedto external torque is considered. The swinging motion isfirst treated as a forward dynamics problem with the knownexternal force and solved by the multi-body dynamics solverADAMS. The solution is assumed to be the true responseof the system used to evaluate the results obtained withthe predictive dynamics formulation. Predictive dynamicsis implemented based on the available information about thesystem. Four cases are examined with predictive dynamicsas listed in Table 1.The pendulum pivots at the point O as shown in Fig. 4.The equation of motion for a rigid bar subject to externaltorque is given asτ 0.1 sin 5tTorque squareMin-maxForward dynamics66.1 Description of the problem-0.5-1.0(16)-1.5Treating q and τ as design variables, four performancemeasures are tested as follows.-2.0-2.5 T-3.0J1 (q, τ, t) 0.00.20.40.60.81.01.21.41.61.8Time (s)Fig. 12 Joint angle prediction of the single pendulum, Case 32.0τ · τ dt(17)t 0J2 (q, τ, t) max τt [0,T ](18)
Predictive dynamics: an optimization-based novel approach for human motion simulation0.50.4Torque squareMin-maxForward dynamicsJoint torque 81.01.21.41.61.82.0The optimization problem is discretized into a nonlinearprogramming problem and then solved by SNOPT with various performance measures as defined in (17), (18), (19) and(20). The optimal solution yields the joint angle, velocity,and external torque history as depicted in Figs. 6, 7, and 8,respectively.It is seen in Figs. 6 and 7 that the performance measurestorque-square and min-max torque successfully predict jointangle and velocity response. However, only torque-squarepredicts joint torque correctly. Minimizing the total time ora constant fails to predict the response of the dynamic system. This is explained by the fact that the natural motionalways obeys an energy-saving rule so the energy-relatedperformance measure is more appropriate for predicting thedynamic motion.Time (s)6.3 Oscillating motion with boundary conditionsFig. 14 Joint torque prediction of the single pendulum, Case 3J3 (q, τ, t) T(19)J4 (q, τ, t) c(20)Oscillating pendulum makes the motion more complex. Thepredictive dynamics approach is examined in this case byextending the final time to T 1.79 s (more than one andone-half period). The optimization formulation is similar to(16) except the final conditions.MinimizeThe first performance measure is to minimize the integral ofsquares of the joint torque for the entire time domain, whichis a form of mechanical energy. The second is to minimizethe maximum torque over the entire time domain, and thethird is to minimize the total travel time T subjected to thesame boundary conditions. The final performance measureis to solve for only a feasible solution where c is a constant.Subject tolI q̈ mg cos q τ2q (0) 0, q̇ (0) 0q (T ) 2.40, q̇ (T ) 2.85, T 1.79 π q π 10 τ 10(21)1.08Torque squareMin-maxForward dynamics0.0-0.5-1.0-1.5-2.0Torque squareMin-maxForward dynamics6Joint velocity (rad/s)0.5Joint angle (rad)J (q,τ .8Time (s)Fig. 15 Joint angle prediction of the single pendulum, Case 42.0-100.00.20.40.60.81.01.21.41.61.8Time (s)Fig. 16 Joint velocity prediction of the single pendulum, Case 42.0
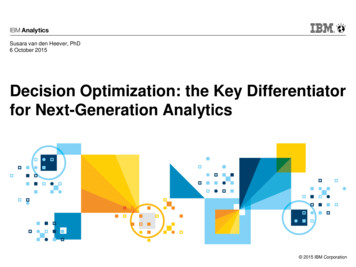
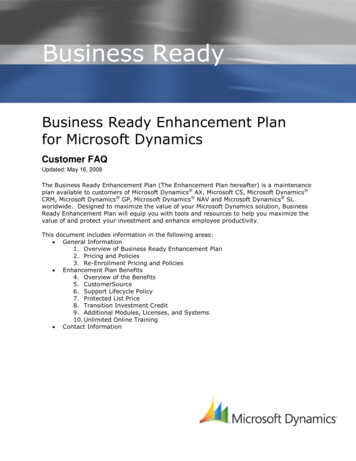
Y. Xiang et al.0.50.4Torque squareMin-maxForward dynamicsJoint torque 81.01.21.41.61.82.0Time (s)Fig. 17 Joint torque prediction of the single pendulum, Case 4Note from the results of the previous section that the performance measure of minimum total time or a constant isnot appropriate for predicting the natural swinging motionof the single pendulum. Thus, only torque squares and minmax formulations are tested as performance measures forthe present case. The optimized joint angle, velocity, andapplied torque are given in Figs. 9, 10, and 11.For the oscillating motion, the predictive dynamicsfails to predict joint angle, velocity, and torque historieswith only the boundary conditions specified. Although anenergy-related performance measure is chosen, predictivedynamics cannot predict the true response due to lack ofnecessary information (constraints) on the dynamic system between the boundaries. This is because both forceand motion are unknowns in the optimization formulation. Although the boundary conditions are satisfied, it maypredict different motion between the boundaries.6.4 Oscillating motion with boundary conditionsand one state-response constraintAdding one state constraint q (0.76) 2.44 rad (obtainedfrom Fig. 5) to the optimization formulation in the previoussection, predictive dynamics is formulated as:J (q, τ, t)lSubject to I q̈ mg cos q τ2q(0) 0, q̇(0) 0q(0.76) 2.44q(T ) 2.40, q̇(T ) 2.85, T 1.79 π q π 10 τ 10Fig. 18 The 55-DOF digital human modelSolving the above optimization problem with the two performance measures, the corresponding joint angle, vel
investigate the predictive dynamics approach for simulation of motion of bio-systems. General concepts associated with the proposed approach are presented and discussed. The approach is applied and analyzed by solving a single pen-dulum problem subjected to a sinusoidal external torque. The pendulum can model the motion of upper and lower