Transcription
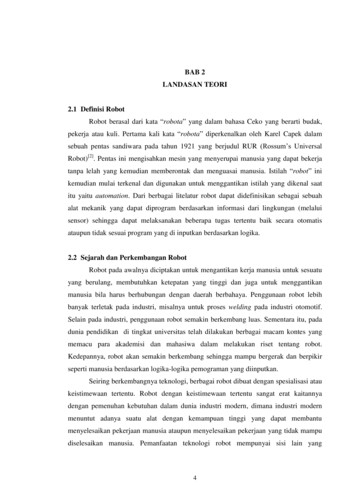
Ubiquitous Computing and Communication JournalISSN 1992-8424AUTONOMOUS MULTI-ROBOT BEHAVIOURS FOR SAFETYINSPECTION UNDER THE CONSTRAINTS OF UNDERGROUNDMINE TERRAINSChika Yinka-Banjo, Antoine BagulaISAT Laboratory, Department of Computer Science, Faculty of Science, University of Cape Town, Cape Town,South Africa(chika.yinka-banjo@uct.ac.za; bagula@cs.uct.ac.za)Isaac O. OsunmakindeSemantic Computing Group, School of Computing, College of Science, Engineering and Technology,University of South Africa, P.O. Box 392, UNISA 0003, Pretoria, South Africa. (osunmio@unisa.ac.za)ABSTRACTThe wide adoption of underground mining has contributed immensely to the rapidgrowth of the countries’ economy, job creation, gross domestic product, fixed capitalformation, gross investment and merchandise exports on an enormous global scale.At the same time, the tedious and dangerous nature of underground mining makes itvulnerable to mine accidents and disasters, such as the fall of loose rocks, trapping ofminers and miners’ death. Building upon a comprehensive survey of safetyinspection issues in South Africa, this paper proposes an autonomous multi-robotcooperative behavioural model that can help to guide multi-robots in pre-entry safetyinspection of the underground mines. We discuss in detail the different safety fearsin underground mines and categorise these issues into mine-related and roboticrelated disasters, the latter being classified according to random component failures,human errors, software failures and systematic hardware faults. We present anempirical analysis of how our proposed model can be used or implemented throughtwo real-life scenarios: a) the inspection of rock falls and b) the detection of gaslevels in underground mines. This survey can be used as a reference guide tounderstand safety management and cooperative behavioural models for undergroundmines and to conduct further research on the existing models to make them moreefficient, reliable and scalable, which can promote their use in larger mines andapplications.Keywords: Safety inspection, underground mine, multi-robot system (MRS), cooperativebehaviour1INTRODUCTIONMining industries are significant economic sectorfor many countries, including the Republic of SouthAfrica, and they incorporate the use of coal, metal andnon-metal minerals. The usefulness of the mineralsextracted from mining cannot be overemphasised: theyare used in electrical generation, production of steel,commercial and residential building products, andasphalt, and in medicine, household, electronic andother manufactured products [1].Over the past 130 years, the mining sector in SouthAfrica has contributed immensely to the developmentof various industries through the use of miningproducts [31]. World-class industries such as energy,financial services, water services, engineeringVolume 7 Number ical services, etc., owe their existence to themining sector [31]. In 2009 South Africa’s miningindustry contributed about 19% of gross domesticproduct , over 50% of merchandise exports, close to1million jobs, approximately 18% of gross investment[31] etc. Fig. 1 from South Africa’s Mineral Industryreport (SAMI)1, displays mining contributionsfrom1999 – 2008. It shows that mining is a hugesource of revenue to South Africa.1Data in all figures and tables, unless otherwise stated, refer toSouth African mines and sources are: MHSI, MHSC, DME, SAMI,F&F Annual Reports and some online resources from SAHO andNUMPage 1316www.ubicc.org
Ubiquitous Computing and Communication JournalFigure 1: Contributions of Mining and Quarrying toGross Domestic Product, Fixed Capital Formation ofSouth Africa, and Total Exports from 1999 – 2008Underground mining remains the most hazardousoccupation in the world because of its disaster rate.Over the past five decades, South Africa has recordeda high number of deaths in underground miningaccidents. The world’s fifth worst underground miningdisaster, in which 437 miners died, happened in SouthAfrica at Coalbrook2 mine in 1960. Several disastershave happened since then. Between 1983 and 1987,3000 miners died and 5000 sustained permanentdisabilities [2] in South African mines. In recent times,there have been a large number of disasters in SouthAfrican underground mines and this is a majormotivation for our research work.In this context it is worth noting that after dailymining activities in the mines, miners currently do notknow the state of rocks, whether very weak, partiallyweak, or stable for the next mining activities and areconsequently ignorant of the potential for rock falls.Similarly, old and abandoned mines are verydangerous to anyone who attempts to explore themwithout proper knowledge and safety training 3. Thesemines often contain deadly gases, standing water thatmay hide deep pits, weak rocks and cracked roofs.Miners are often not aware of the state of the minebefore they enter. The most important question in thiscontext is how miners can be aware of the situation inmines before they engage in operations. Can minersknow the state of rock formations, whether very weak,partially weak, or stable for mining activities andconsequently gauge the potential of rock falls?Understanding these concerns through roboticautomation of multi-robot cooperative behaviour willhelp to prevent disasters in underground mines.Mining companies and researchers have beenpursuing the goal of mitigating some of these minedisasters. A holistic five-point4 ground managementstrategy to address the incidence of accidents andfatalities related to fall of ground was initiated in 2002by a local South African mining company. This hasbeen implemented in an attempt to deal with dia.org/wiki/MiningISSN 1992-8424rock conditions by looking at mine design and minelayout. Numerical modelling systems were used inconsidering the size of the support pillar, stopedimension and extraction sequence. These measuresare taken to reduce damage to the rock during miningbecause mining involves fracturing rock structures orworking with already fractured rock. In 2003 the minedesign and layout phase conditions were controlled.All types of mine support standards were replaced byelectronic-based systems, which could be incorporatedinto computer aided design plans and made accessibleby all mines. Molina et al. contributed to safety inunderground mine by using wireless networks asmonitoring systems for the detection of dangerousgases and collapses [23]. Their system is used for earlywarning signs to prevent injuries and significanteconomic losses. This contribution is the preparednessphase in the prevention of disaster, as shown in Fig. 4.On the other hand, Stormont et al. proposed usingautonomous robots to manage risk in disasterscenarios. One of the scenarios presented in this paperis the robots deployed for rescue at the WorldTrade Centre disaster site in 2001. The authors alsodiscussed the semi-autonomous exploration rover thatexplored the planet Mars and the computer model usedto investigate issues of trust and the impact ofreliability in a fire-fighting scenario [22]. In the firefighting scenario, the robots are called upon forassistance when the human fire-fighters are notmaking enough progress putting out the fires. Themodel was simulated and created using a Net Logoagent modelling language. There has been also ongoing research focusing on reducing rock fall and rockburst accidents in underground mines since 2006. Alocal South African mining company is co-sponsoringa project with a South African research institute calledIntegrated Damage Rheology Model (IDRM), which isfocusing on numerical modelling of mining andseismic data [30].It is commonly said that prevention is better thancure. Rather than spend millions of US dollars ondeploying a solution in a disaster rescue, it is better tospend that money on prevention (safety).Figure 2: The four Phases of a DisasterAccording to the U.S. Federal EmergencyManagement Agency (FEMA), disaster has fourphases, as depicted in Fig. 2, which are associated bythe public with immediate life-saving or mitigationefforts, leading to disaster response or disastermanagement5. We are using this research to contributeto the first phase of a disaster, which is prevention.This will be achieved by sending interactingautonomous multi-robots to inspect the safety of rinvestors/reporttosociety05/values bus principles/safety health/sh cs sa 5 9.htmVolume 7 Number rs.pdfPage 1317www.ubicc.org
Ubiquitous Computing and Communication Journalmine by assessing the status of the rocks, roofs, gasesand water level before miners enter to performoperations. Mine inspections before miners enter theunderground area to work have not really beenexplored. Such inspections are part of what we areproposing as preventive safety measures.The objective of this paper is to present acomprehensive survey of safety inspection issues andpropose an autonomous multi-robot cooperativebehavioural model for underground mines. The maincontributions in this paper are as follows: Development of a newly proposed cooperativebehavioural model for autonomous multi-robotsystem (MRS) deployed for preventive undergroundmine safety inspections. Knowledge generation as a reference guide tounderstand mine safety management in general andcooperative behavioural models in particular detail. A systematic survey and representation of researchchallenges and open problems in the design of acooperative behavioural model.The remainder of this paper is arranged as follows:In section 2, we provide a paradigm of cooperativebehavioural models. In section 3, some insights onrobotics and mine safety disasters are provided. Insection 4, our proposed system model for MRSbehaviours in underground mines is presented. We didsome empirical analysis in section 5.In section 6,weoutline some open research issues in behaviouralmodelling for autonomous MRS. We conclude thispaper in section 7.2 COOPERATIVE BEHAVIOURALMODELLING PARADIGM2.1 What is Safety?Before we proceed to findings, it is important tomention that the information technology, robotics andmining disciplines have different perceptions of safety.However, the definitions of the term safety that areprovided broadly underpin its dictionary meaning (seeFig. 3). From the point of view of cooperativebehavioural models, the definition of safety appears tobe closer to those used in the robotics and miningsphere. In robotics, self-driving cars are likened to asafety system by Seth Teller6. Teller claims that thenumber of accidents will decrease substantially withself-driving cars. In the area of smarter transportationsystems, Jessica Richeri7 also developed anautonomous vehicle able to recognise and avoidobstacles, thus, it is hoped, preventing -ieeescholarshipVolume 7 Number 5ISSN 1992-8424Collision avoidance is another related safety area thatenables robots to navigate freely to their destinationswithout colliding with any obstacle.The mining definition of safety includes all miningactivities ranging from slips and falls to protectionfrom electric shock, machinery, eye injury anddrowning. Safety in mining involves training ofminers, which helps in maintaining the relationshipbetween working safely and productivity. Fig. 3 showdifferent safety definitions.The researcher’s views and acceptance of acooperative behavioural model will be betterunderstood as a safety paradigm towards the end of thepaperIT defines safety as a devicepreventing unintentionaloperationDictionary defines safety asprotection from or not beingexposed to the risk of harm orinjuryRobotics defines safety in termsof robot safety as safeguardingindustrial robots from hazardousconditions by programming andmaintaining the robotsMining definition of safetyincludes all mining accidentsranging from slips and falls todrowning etc.Figure 3: Safety Definitions2.2Cooperative Behavioural ModellingFrameworksThe cooperative behaviour of MRS has been studiedby some researchers; but its practicality andimplementation have not been finalized. Muchresearch is still required in this area to achievecooperation in real life. Generally, two types ofcooperation exist [5]: Passive Cooperation: In this case, cooperationexists when the whole environment is observed,which is called emergent behaviour. Robots thatsense one another as obstacles and navigate awayfrom one another are examples of this type. Active Cooperation: Robots in this groupcooperate through any of the means ofcommunication (wired, radio, wireless, etc.). In thistype of cooperation, details of the action to beperformed by the robots needs to be communicatedto all the robots.One can use unmanned ground vehicles (UGVs) as anexample for the distinction of active and passivecooperation. Active cooperation exists betweenvehicles with sufficient bandwidth on thecommunication channel for negotiation of actions,while passive cooperation exist in situations wherethere is limited bandwidth and so no negotiation withone another occurs. MRS has been classified usingdifferent definitions by different authors. Dudek et al.present the taxonomy for MRSs in [6].Page 1318www.ubicc.org
Ubiquitous Computing and Communication JournalISSN 1992-84242.2.1 Task-based classification: This explains the typeof task a group of robots can undertake. For instance,some: (i) require multi-agents, (b) are traditionallymulti-agents (transportation, industrial, agriculturaland fishing-related tasks), (iii) are inherently singleagents, and (iv) may benefit from the use of multipleagents.2.2.2 Size of robot collectives: This explains thenumber of robot that can be in a group. Dudeksummarised this as: (i) the minimal collective is madeup of one robot (SIZE-AlONE), (ii) the simplest groupis made up of two robots (SIZE-PAIR), (iii) therecould be a limited number of multiple robots (SIZELIM) and (iv) an infinite number of robots (SIZEINF).2.2.3 Communication: This is a class that shows thedifferent ways robots interact with other robots and theenvironment. In this class, there are three subclasses:(i) a situation where there are no directcommunications between robots (COM-NONE), (ii)robots communicating locally (COM-NEAR) and (iii)communication of robots in a wider range (COMINF).2.2.4 Reconfiguration: This shows the rate at whichthe group can re-organise itself and move with respectto one another. The arrangement can be: (i) static(ARR-STATIC), which means that the topology isfixed (ii) a coordinated rearrangement (ARR-COMM);here the topology can be alternated and (iii) dynamic(ARR-DYN); behaviours here can change randomly.2.2.5 Composition: This explains the different unitsfrom which the group is made up. The collective canbe made up of different units: (i) identical (CMPIDENT), (ii) homogeneous (CMP-HOM) and (iii)heterogeneous (CMP-HET).2.2.6 Control: The existing architectures are explainedhere. They are: (i) centralised (CTL-CEN), (ii)decentralised (CTL-DEC) and (iii) hybrid (CTL-HYB)[5].2.3.1Synchronous approach in MRS navigation:The synchronous approach in MRS navigationinvolves the use of an attached learning capability toindividual robots for navigation to their destinations atthe same time. It also involves real-timecommunication and collaboration between robots asthey simultaneously navigate to achieve a given task.2.3.2Asynchronous approach in MRS navigation:In this case, robots start navigation at different timesbut connect according to their own schedule. Theinteraction between the robots is easily captured,shared and distributed in this approach. The ultimategoal for a team of robots is to complete their missionas quickly as possible without wasting energy. Thisgoal is worth investigating using both the synchronousand asynchronous modes of navigation.2.3 Deploying Cooperative Behavioural Models inMRS NavigationOur proposed software architecture for acooperative behavioural model is a fully distributedarchitecture that uses adaptive action selection toachieve cooperation. Robots in this system aredesigned using behaviour-based approaches, where anumber of task achieving behaviours are activesimultaneously. The robots in this system reactquickly to the actions of other robots, by performing atask differently from the other robots’ task and turningin a direction different from the direction of the otherrobots. To detect and interpret the actions of otherrobots, there exists a communication network in theform of wireless communication between the robots.The robots broadcast statements of their currentactions to one another. Based on communicationstrategy, the use of cooperative behavioural modelscan be categorised in this paper as synchronous andasynchronous in MRS navigations.3 ROBOTICS, MINES AND SAFETY FEARSVolume 7 Number 52.4 Application of Cooperative BehaviouralModelsResearchers have investigated the applications ofhaving a group of robots that cooperate in order tocomplete some required tasks. Some of theapplications are exploring an unknown planet [7],capturing intruders[8], pushing objects [9,10],selecting action in a robot soccer game [17, 18],cooperative construction and transportation [13],cleaning up toxic waste [14], decision-making [15],joint transportation [16].The new behaviour-based model proposed in thiswork involves the use of behaviours as the basicrepresentation level for learning. The goal of thebehaviour is to achieve a cooperative safety inspectionfor a MRS in a rough terrain such as an undergroundmine. To the best of our knowledge, despite beingwidely used for cooperation in other applications, thecooperative behavioural models of MRS have not beenapplied to safety inspection tasks in an undergroundenvironment.3.1 Underground Mine DisastersMine disasters are caused by explosions (methane,coal dust or others), fires, rock and roof falls, toxic gasoutbursts and inundations/rushing water [3]. Figs. 4and 5 show the recent causes of fatalities and injuriesin South African mines. At present, fall of groundaccidents occur mainly in the deep underground minesas shown in Figs. 4 and 5.Page 1319www.ubicc.org
Ubiquitous Computing and Communication JournalISSN 1992-84243.1.2 Specific disasters in the world’s undergroundMinesIn Table 2, some underground mine disasters fromvarious countries and the causes are explained. Themost frequent cause of these disasters was rock fall.The fatality numbers in Table 2 showed that SouthAfrica had the highest number (435), followed byIndia (375).Table 2: Disasters in Underground Mines [3]Figure 4: Fatality per Casualty ClassificationYear6 August2007MineCrandall CanyonMine, USA25 April2006BeaconsfieldTasmania Mine,AustraliaChasnala Mine,India27December1975Figure 5: Injury per Casualty Classification3.1.1 Comparison of South African fatality rates incoal mines with other countries.Table 1 show a comparison between the SouthAfrican coal mine fatality rate and that of othercountries such as the United Kingdom (UK), the USA,Western Germany, New South Wales and India from1978 to 1988. According to the table, the averageSouth Africa fatality rate is over eight times that of theUK, three times that of Indians and approximatelydouble the rate in the USA, Western German and NewSouth Wales [2].Table 1: Coal Mine Underground Fatality for SouthAfrica and other Countries 0.650.410.770.45Volume 7 Number 521 January1960Coalbrook NorthMine SouthAfrica5h August2010San Jose Coopergold Mine, ChileCausesA roof collapse trapped 6miners in an underground coalmineA small earthquake triggeredan underground rock fall,trapping 17 minersAn explosion that was followedby flooding and then roofcave- in drowned 375 minerstrapped underground.This disaster was caused bythe collapse of several wallsand a series of rock falls,releasing large quantities ofmethane.A roof cave-in trapped 33miners in a chamber of about2,300 feet below the surface.Fatalities9 deaths6 injuries1 death375deaths435deaths03.2 Robotics Related DisastersRobotics accidents result from equipmentmalfunction, poor operating practices and otherelements as depicted in Fig. 6[29]. Over the yearsindustrial robot safety has received extensive attention,followed by robots outside factories, such as domesticand hospital robots. Recently, however, hazardousarea robots have been employed in cases where safetyand reliability are critical. The types of breakdown thataffect robots’ reliability and safety, according to [29],are human error, software failure, random componentfailure and systematic hardware failure.SystematicHardware FaultRadomComponentFailure-BreakdownTypesHuman ErrorSoftwareFailureFigure 6: Types of Breakdown that Affect Robots’Reliability and SafetySoftware failures are the most important concern inrobot related accidents. This is because they determinethe flexibility and robustness of the robot and henceare the focus in this research. Human error is also partof total robot breakdown, which is caused by peoplePage 1320www.ubicc.org
Ubiquitous Computing and Communication Journalwho design, manufacture, test, operate and maintainrobots. Unpredicted breakdowns are regarded asrandom component failures [29]. Unknownmechanisms in robot designs are major causes ofsystematic hardware faults.Over the years, industrial robots have caused somehazards. The following are some past robot relatedaccident data from [18]. An injury led to the death of a worker who violatedsafety devices by entering a material handling robotarea. The worker was trapped between the robot anda post anchored to the floor. The first robot-induced fatal accident occurred inJapan in 1978. The first fatal robot-related accident in the USAoccurred in 1984. Between 1978 and 1984, at least five fatal accidentsinvolving robots occurred, four of these accidentsoccurred in Japan and one in the USA. Line workers and personnel were at the greatest riskof injury, according to a study of 32 robot-relatedaccidents in Japan and the USA in 1987.To understand the rationale for this work better,we conducted a safety survey by sampling articles onbehavioural model from IEEE and science directdatabases. Fig. 7 shows the findings from theempirical survey. About twenty articles from 1990 tothe present date were reviewed for this survey. Theoutcome shows that while research efforts have beenundertaken to mitigate some related safety issues,more work still needs to be done to deal with safetyissues, especially in underground mines. The largerpercentage of the existing work needs improvements,about five out of the twenty surveyed articles do notneed improvements and 5% of the surveyed articlesdid not refer to safety issues on both robotics andmining. For instance, in the mining sector, severalrules and regulations have been issued to miners toensure safety in the mine, but the more the rules, themore the disasters and fatalities. [27] states that minemanagements and regulators should stop creating morerules. Human beings cannot keep up with all theserules for safety; they are prone to errors most of thetime, especially in confined environments such asmines [3]. This has created urgency to build modelsfor MRSs to mitigate the danger in these nownFigure 7: Do Existing Behavioural Models NeedImprovement for Robotics and/or Mine Safety?4ISSN 1992-84244.1Machine Learning Algorithms as a SafetyMeasureLearning is needed in applications where humansare unable to explain their skills, for example inspeech recognition, where solutions change over timeas in routing on computer networks, and where asolution needs to be adapted to a particular case, forexample user biometrics . There are three main ised learning and reinforcement learning. Fig.8 displays the major subfields of machine learning. Inthis work, we intend to use machine learningalgorithms to address the safety inspection problem.The platform which is used in developing our modelconsists of two autonomous robots that know theactions of one another through collaborating. Forinstance, before the first robot A could take an action,it needs to know the action taken by the second robotB and vice versa. Learning is required to address thiscooperative problem and this can be undertaken byreinforcement learning algorithms and swarmintelligence (SI) techniques. To develop cooperativebehaviours for these robots, collaboration is required.Cooperation and collaboration are two fundamentalelements required in behaviour-based robotics [5].These elements are adapted from biologicalmechanisms. For instance, the study of cooperativebehaviour of bees and ants from SI show thepossibilities for simple robots to work together andsolve a very complex problem [4]. Here, the model isdesigned to help the robots to learn, make decisions,execute actions and in the end get a reward. The modelthat is developed will be used to discover the bestbehaviour to handle inspections in underground minesby MRS.4.1.1 Reinforcement learning algorithm and swarmintelligence (SI)SI is a component of computational intelligence that isused in solving stochastic/probabilistic problems likein the field of robotics/artificial intelligence tainment [28]. In the field of robotic/AI, SI can beemployed to address the cooperative behaviour ofrobots because of the emergent collective intelligenceof groups of simple agents. Group foraging of socialinsects, cooperative transportation8 are some of theexamples of emergent collective intelligence. Antcolony optimisation (ACO), particle swarmoptimisation (PSO) and bee colony optimisation(BCO) are some of the techniques of SI, as depicted inFig. 8b. SI is interesting in solving the aforementionedproblems because of the following features: distributedsystem of interacting autonomous agents, selforganised control and cooperation, indirect interaction,performance optimisation and robustness. Thesefeatures are inspired by nature and modelled throughPROPOSED COOPERATIVEBEHAVIOURAL MODEL FORAUTONOMOUS MRS8Volume 7 Number 5http://staff.washington.edu/paymana/swarm/krink 01.pdfPage 1321www.ubicc.org
Ubiquitous Computing and Communication Journalthe enablement of biological species (bees, ants,particles etc.)9.Reinforcement learning (RL) is used to learn how tobehave in a new environment. Here, autonomousagents learn to act optimally/best without humanintervention. Agents learn by randomly interactingwith their environment, and getting sporadic rewards.The purpose is to maximise these rewards. Fig. 9explains the repeated sequence of events and the causeand effect of an RL cycle. An RL system has four subelements apart from the agent and the environment:policy, a reward function, a value function and/or amodel of the environment.Models imitate behaviours of the environment,predict the next state and give the initial state andaction. Models are generally used in planning futuresituations. Fig. 10 is an example of learning inrobotics, where the small round lemon objectsrepresent static navigational features, the shadedrectangular objects represent obstacles, the wheeledobjects represent multi-robots and the green sphericalobject represents the goal eRuleLearningK-nearestneighbor etc.RegressionAnalysis etc.ISSN 1992-8424In the scenario, if the agent hits an obstacle, it gets anegative reward, if it gets to the goal, it gets a positivereward and when it gets the goal faster, it gets a biggerreward.Figure 9: Reinforcement Learning Cycle with Causeand EffectThe list of some of the RL algorithms are shown inFig. 8a with two different categories: the model-basedand the model-free. Model-based ones build a modelof the environment and use it to learn the environment.Examples include adaptive dynamic programming andMonte Carlo methods. The model-free ones learn thepolicy without model and the advantage of thismethod is that it requires limited memory for itsoperation. The temporal difference method is a type ofmodel-free RL.4.1.2POMDPPOMDP, the Partially Observable Markov DecisionProcess, is used in modelling many kinds of real-worldproblems such as robot navigation problems, planningAprioriAlgorithmetc.UnsupervisedTypes .Figure 8a: The Taxonomy of Machine LearningHill ryAlgorithmEvolutionComputationSwarmIntelligence (SI)RandomOptimizationGeneticAlgorithm (GA)Particle SwarmOptimisation(PSO)Ant ColonyOptimisation(ACO)Bee ColonyOptimisation(BCO)Figure 8b: The Taxonomy of Stochastic AlgorithmsFigure 10: Reinforcement Learning in Roboticsunder uncertainty etc. It is used where access to a stateis not available but information about it is obtainedthrough to observation model. It is a generalisation ofthe Markov Decision Process (MDP). MDPs aremodelled mathematical frameworks used in makingdecisions in cases where outcomes are partly randomand partly under the control of a decision-maker. Weuse POMDP for modelling because it is a standardframewo
AUTONOMOUS MULTI-ROBOT BEHAVIOURS FOR SAFETY INSPECTION UNDER THE CONSTRAINTS OF UNDERGROUND MINE TERRAINS. Chika Yinka-Banjo, Antoine Bagula . ISAT Laboratory, Department of Computer Science