Transcription
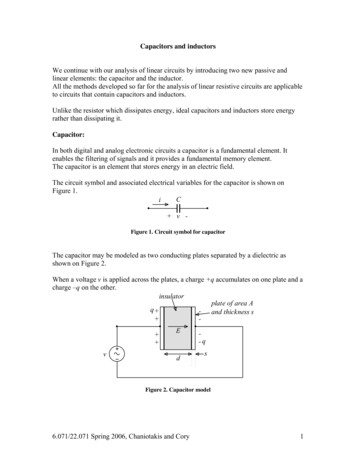
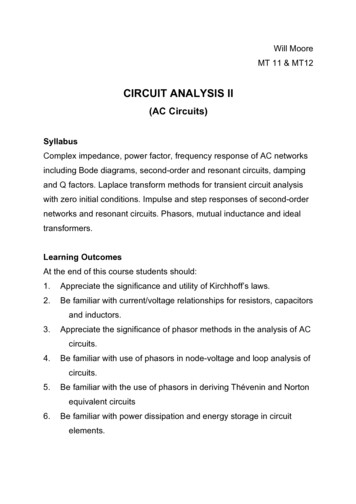
Professor Terje HaukaasThe University of British Columbia, Vancouverterje.civil.ubc.caKirchhoff and Mindlin PlatesA plate significantly longer in two directions compared with the third, and it carries loadperpendicular to that plane. The theory for plates can be regarded as an extension of beamtheory, in the sense that a beam is a 1D specialization of 2D plates. In fact, the EulerBernoulli and Timoshenko beam theories both have its counterpart in plate theory: Kirchhoff theory for plates Euler-Bernoulli theory for beamsMindlin theory for plates Timoshenko theory for beamsThe Kirchhoff theory assumes that a vertical line remains straight and perpendicular tothe neutral plane of the plate during bending. In contrast, Mindlin theory retains theassumption that the line remains straight, but no longer perpendicular to the neutral plane.That means that Kirchhoff theory applies to thin plates, while Mindlin theory applies tothick plates where shear deformation may be significant.Figure 1 shows the notation for the bending moments and shear forces in plates. Thedocuments posted on this website use a different convention for beams and plates. TheBEAM quantities are formulated with ONE index with the following meaning: My is the bending moment about the y-axis (leading to the notation Iy for thecorresponding moment of inertia)Vz is the shear force in the direction parallel to the z-axisConversely, the PLATE quantities are formulated with TWO indices with the followingmeaning: Myy is the bending moment obtained by integrating the axial stress syyVyz is the shear force obtained by integrating the shear stress tyzMxy is the “twisting moment” obtained by integrating the shear stress txyThe first index of a stress denotes the surface normal of the plane the stress acts on, whilethe second index is the direction of the stress. Also notice that in plate theory, themoments and shear forces are measured per unit length along the plate edge.τ xzσ xxh/2M xxM xyσ yyz, wVxzh/2τ xy τ yxτ yzx, uθxVyzM yyM yxy, vθyFigure 1: Stresses and stress resultant in a plate element.Kirchhoff and Mindlin PlatesUpdated June 10, 2019Page 1
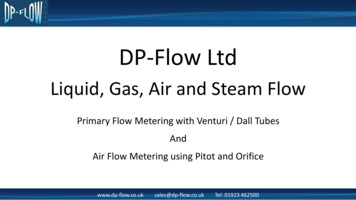
Professor Terje HaukaasThe University of British Columbia, Vancouverterje.civil.ubc.caSection IntegrationLetting the z-axis have its origin at the neutral plane of the plate, the moments are definedby the integralsh/2 M xx z σ xx dz(1)z σ yy dz(2)z τ xy dz(3)z τ yx dz(4) h/2h/2M yy h/2h/2M xy h/2h/2M yx h/2From basic solid mechanics it is known that txy tyx, which implies that the twistingmoments are equal: Mxy Myx. In the Kirchhoff plate theory the postulation from EulerBernoulli beams is made that the shear deformation is zero, hence the shear strain, shearstress, and shear forces are omitted from the theory. Of course, the shear forces can laterbe recovered by equilibrium considerations, but at first Vxz and Vyz are left out of theKirchhoff theory. However, in Mindlin theory the shear forces are obtained byintegration of the shear stresses:h/2Vyz τ yz dz(5)τ xz dz(6) h/2h/2Vzx h/2EquilibriumConsider the infinitesimal plate element shown in Figure 2. It extends dx in x-directionand dy in y-direction. Its thickness is h and it is subjected to a distributed load of intensityq(x,y) in the z-direction. Equilibrium in the z-direction yieldsq dx dy V yzdy dy dx V Vxz V dx dy 0 q yz xz 0 x y x(7)Moment equilibrium about the y-axis, at the left front edge in Figure 2 yields M yx M xx M xx M yx dx dy dy dx Vxz dy dx 0 Vxz x y x y(8)Moment equilibrium about the x-axis, at the right front edge in Figure 2 yieldsKirchhoff and Mindlin PlatesUpdated June 10, 2019Page 2
Professor Terje Haukaas M yy yThe University of British Columbia, Vancouver dy dx M xy xterje.civil.ubc.ca dx dy Vyz dx dy 0 Vyz M yy y M xy x(9)The three equilibrium equations can be combined into one. Partial differentiation of Eq.(8) with respect to x and partial differentiation of Eq. (9) with respect to y, followed bysubstitution of those equations into Eq. (7) yields2 2 M xy 2 M xx M yyq 2 0 x y x 2 y2(10)zVxxVyyM yxM yyM xyM xxdydxM yy x M xyM xy dx xM xx M xxdx x VVxz xz dx xVyz M yydy y Vyzdy yM yx y M yxdy yFigure 2: Infinitesimal plate element.Material LawFor the relatively thin plates it is appropriate to consider the plane stress version ofHooke’s law to model the in-plane behaviour: σ xx σ yy τ xy 1 ν0 E ν 10 2 1 ν 0 0 1 ν 2 ε xx ε yy γ xy (11)Mindlin theory also requires the relationship between the other shear stresses and strains:Kirchhoff and Mindlin Platesτ xz G γ xz(12)τ yz G γ yz(13)Updated June 10, 2019Page 3
Professor Terje HaukaasThe University of British Columbia, Vancouverterje.civil.ubc.caKinematicsIt is the kinematic relationships that best reveal the difference between the Kirchhoff andMindlin theories. In Euler-Bernoulli theory for beams and Kirchhoff theory for plates,rotation is equated with the derivative of the lateral displacement. That implies thatstraight lines remain straight and perpendicular to the neutral axis during bending. Thisassumption is relaxed in Timoshenko beam theory and Mindlin plate theory. Tounderstand the implications of these assumptions, the fundamental kinematic equationsfrom solid mechanics are first listed: ε ε xx x00 ε yy 0 y0 ε zz 00 z γ xy y x0 z yγ yz 0 0 xγ zx z u v w (14)Among those six equations, the third is irrelevant here because ezz is assumed to be zero.To spell out the other equations, it is recognized from Figure 1 thatu z θ y(15)v z θ x(16)andSubstitution of Eqs. (15) and (16) into Eq. (14) yields the following five remainingequations:ε xx z θ y,x(17)ε yy z θ x,y(18)γ xy z θ y,y z θ x,x(19)γ yz θ x w,y(20)γ zx θ y w,x(21)Similar to the Euler-Bernoulli beam theory, in Kirchhoff plate theory it is assumed thatθ x w,y(22)θ y w,x(23)andThat implies that in Kirchhoff theory, Eqs. (17) through (19) reads:ε xx z w,xxKirchhoff and Mindlin PlatesUpdated June 10, 2019(24)Page 4
Professor Terje HaukaasThe University of British Columbia, Vancouverterje.civil.ubc.caε yy z wyy(25)γ xy z wyx z wxy 2 z wxy(26)while the shear strains gyz and gzx are zero.Differential EquationFor Kirchhoff plates, the combination of stress resultant, material law, and kinematicequations, as well as integration along z, yields the following governing equations: 2 w 2 w M xx D 2 ν 2 y x(27) 2 w 2 w M yy D 2 ν 2 x y(28)M xy D (1 ν ) 2 w x y(29)where the “plate stiffness, D, comparable with EI for a beam, is defined as:D E h312 (1 ν 2 )(30)Substitution of Eqs. (27), (28), (29) into the equilibrium equation from Eq. (10) yields thefourth order differential equation for plate bending: 4 w 4 w 4 wq 2 4422D x y x y(31)Eqs. (27) and (28) allow a useful interpretation for plates that span in one direction only.A strip of such a plate can be considered as a beam. In other words, when one of thecurvatures in the parentheses in Eqs. (27) and (28) is zero then the equations take theformM xx D 2 w x 2(32)This does indeed lead to the conclusion that D take the place of the bending stiffness EIfrom beam bending, when a unit-width strip of the plate is considered. The use of D inplace of EI essentially accounts for the constrained strain, i.e., “plane strain,” in the platecontinuing on the sides of the plate strip.Recovery of Shear Forces: Kirchhoff’s Shear ForceThe anomaly of beam theory due to Navier’s hypothesis carries over to plate theory.Instead of including shear stresses and strains in the theory, the shear forces are recoveredonly after solving the differential equation. The equilibrium in Eqs. (8) and (9) areKirchhoff and Mindlin PlatesUpdated June 10, 2019Page 5
Professor Terje HaukaasThe University of British Columbia, Vancouverterje.civil.ubc.caemployed for this purpose. However, these two equations are only one part of the totalshear force in plate theory, as explained next.According to the theory above, three stress resultants act along the edge of a plate:bending moment, shear force, and twisting moment. The number of unknowns in thegeneral solution to the differential equation is insufficient to prescribe that manyboundary conditions. This leads to a closer examination of the twisting moment, andsubsequently its inclusion into the total shear force. To this end, consider the twistingmoment Mxy and its variation in the y-direction. Figure 1 may be of help in visualizingthis. Next, imagine that within each infinitesimal segment of length dy the twistingmoment Mxy gives rise to a force pair. Let the forces be dy apart; because the momentwithin a length dy is Mxy.dy, each force is Mxy. When the twisting moment varies along y,then there will be a “surplus” of the force Mxy within each infinitesimal segment. Thissurplus is same as the change of Mxy within a length dy, namely M xy y . The total shearforces are then:Vxz Vyz M xy 3w 3w D 3 (2 ν ) y x y 2 x M yx 3w 3w D 3 (2 ν ) 2 y x y y(33)(34)The force-interpretation of the twisting moment leads to another conclusion. When Mxyand Myx and varies along the plate edge there is a net shear force at the corner of the plate.For example, when a square plate is bending under uniform downward loading then thecorners will experience uplift. This is due to the net unbalanced concentrated force equalto 2Mxy at the corner. This shear force is known as Kirchhoff’s shear force and the corneruplift is referred to as the Kirchhoff effect.Navier’s SolutionThis solution for thin plates was presented to the French Academy in 1820 by ClaudeLouis Navier and is explained in detail in one of Timoshenko’s books (Timoshenko andWoinowsky-Krieger 1959). A simply supported rectangular plate with length a in the xdirection and length b in the y-direction is considered. Navier’s solution stems from thepreliminary consideration of one “sine pillow” as loading on the plate: πx π y q(x, y) α sin sin a b (35)where a is the maximum amplitude of the load, at the middle of the plate. Furthermore,the following trial solution satisfies the boundary conditions that require zerodisplacement and bending moment on the edges: πx π y w(x, y) C sin sin a b (36)Substitution of Eqs. (35) and (36) into the differentiation equation in Eq. (31) yields:Kirchhoff and Mindlin PlatesUpdated June 10, 2019Page 6
Professor Terje HaukaasThe University of British Columbia, Vancouverterje.civil.ubc.ca π4 πx π y π4 πx π y C sin sin a b C b4 sin a sin b a 4 πx π y α πx π y π4 2 C 2 2 sin sin sin sin a b D a b ab(37)The same sine product appears in all terms; hence, they cancel, and rearranging yields theunknown constant in the solution:C α 1 1 D π 4 2 2 a b (38)2Navier extended this approach by using multiple sine functions to describe the load,expressed as a series expansion: mπ x nπ y q(x, y) qmn sin sin a b m 1 n 1(39)The coefficient qmn is in general different for each n and m and essentially describes themagnitude of the load. To determine qmn, i.e., to link Eq. (39) with actual load, e.g.,uniformly distributed load, it is useful to express Eq. (39) as an integral instead of a sum.This is cleverly done by multiplying Eq. (39) by an identical sine product, only withdifferent “counters” n and m, and integrating the result:b a m! π x n!π y sin dx dy a b q(x, y) sin 0 0 mπ x nπ y m! π x n!π y qmn sin sin sin sin b dx dy a b a b a0 0(40)m 1 n 1Becausea mπ x m! π x sin dx 0 a a sin 0whenm m!(41)a mπ x m! π x a 0 sin a sin a dx 2whenm m!Eq. (40) simplifies tob a m! π x n!π y ab sin dx dy qmn a 4 b q(x, y) sin 0 0(42)from which qmn is solved for specific load distributions q(x,y). For the case of uniformlydistributed load, q(x,y) qo, Eq. (42) yields:Kirchhoff and Mindlin PlatesUpdated June 10, 2019Page 7
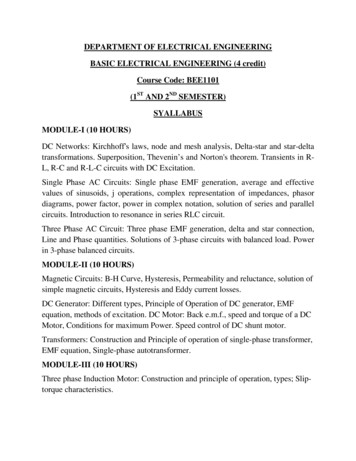
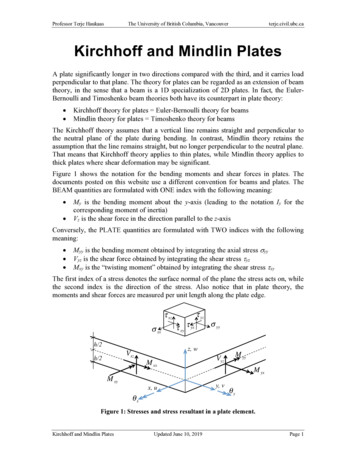
Professor Terje HaukaasqmnThe University of British Columbia, Vancouver 16qo4qo b a m! π x n!π y sin sin dx dy π 2 mn ab 0 0 a b 0 terje.civil.ubc.cam n odd(43)otherwiseFor the case of a point load with value P positioned at x x and y h Eq. (42) yields a sumover all m and n, now both odd and even:qmn mπξ nπη 4P sin sin ab a b (44)Now to the displacement solution. The solution in Eqs. (36) and (38) contained one sineterm. Navier’s solution contains many: mπ x nπ y sin sin a b m 1 n 1 m2 n 2 4D π 2 2 b a qmnw(x, y) 2(45)with the coefficient qmn determined above.Lévy’s SolutionNavier’s solution is a conceptually straightforward application of a double trigonometricseries. However, the series does not converge fast; thus, high-order derivatives of w maybe inaccurate. Around 1899 Levy suggested another approach (Timoshenko andWoinowsky-Krieger 1959). Again a simply supported rectangular plate with length a inthe x-direction and length b in the y-direction is considered, but now the coordinatesystem is shifted as shown in Figure 3.yyCoordinate systemfor Navier’ssolutionCoordinate systemfor Levy’s solutionb/2xbb/2OriginOriginxaaFigure 3: Coordinate systems for plate solutions.Levy formulated a solution that first focuses on the x-direction span from x 0 to x aconsisting of a “homogeneous solution,” wh, and a “particular solution,” wp:Kirchhoff and Mindlin PlatesUpdated June 10, 2019Page 8
Professor Terje HaukaasThe University of British Columbia, Vancouverw(x, y) terje.civil.ubc.ca mπ x q(x, y) 433hm ( y) sin 24D x 2ax a xa m 1,3,5.#### !####"#### !####"wpwh ( )(46)where hm is a function that depends on y only, and m must be odd due to symmetry. Theparticular solution, wp, satisfies the differential equation in Eq. (31) and also the boundaryconditions at the two edges x 0 and x a, namely zero displacement andmoment/curvature. Now hm(y) must be formulated such that it satisfies the homogeneousversion of the differential equation in Eq. (31), and such that w wh wp satisfies the fulldifferential equation and all boundary conditions. Applying those two conditions, andreformulating the particular solution as the series expansionwp mπ x q4qa 4 1 x 4 2ax 3 a 3 x 5sin 524D a π D m 1,3,5. m()(47)yields the solution (Timoshenko and Woinowsky-Krieger 1959) mπ b mπ b tanh 2 mπ y 2a 2a 1 cosh mπ b a 2 cosh 2a mπ x 4qa 4 1 sin w(x, y) 5(48) 5 a π D m 1,3,5. m mπ b 2a mπ y 2y ! sinh mπ b b a 2 cosh 2a Assuming b a the maximum deflection at the middle of the plate, i.e., at x a/2 and y 0,can be expressed relative to the maximum deflection of a comparable beam:wmax 445qa4qa 5384D π D m 12( 1)m5m 1,3,5. mπ x mπ x a tanh a 2 mπ x 2 cosh a (49)Edge MomentsThe solutions presented above are for simply supported plates. Those solutions can besuperimposed with the solution for a plate with distributed moments along the edges toenforce other boundary conditions. Using Levy’s coordinate system in Figure 3,Timoshenko presents in Article 41 of his book on Plates and Shells (Timoshenko andWoinowsky-Krieger 1959) a solution for a simply supported plate subjected to uniformlydistributed moment, M0, about the x-axis along the edges y b/2:Kirchhoff and Mindlin PlatesUpdated June 10, 2019Page 9
Professor Terje HaukaasThe University of British Columbia, Vancouver2 M0a2 π 3 D m 1,3,5.w(x, y) terje.civil.ubc.ca mπ x 1 γ m sin mπ b a m3 cosh 2a (50)whereγm mπ b mπ y mπ y mπ y mπ b tanh cosh sinh 2aa 2a a a (51)A more general solution with varying intensity of the edge moments is mπ x sin a aw(x, y) E γ mπ b m m2π 2 D m 1 2m cosh 2a 2(52)where the edge moment, now varying in the x-direction, is expressed asf (x) mπ x Em sin a m 1,3,5. (53)Two Edges Clamped, Two Edges Simply SupportedFor a uniformly loaded plate, simply supported along the two edges x (0,a) and clampedalong the two edges y ( b/2), Timoshenko finds the following edge moment factors to besubstituted into Eq. (52):Em 2 mπ b mπ b mπ b mπ b tanh 1 tanh 2a2a 2a 2a 4qa π 3m3 mπ b mπ b mπ b mπ b tanh tanh 1 2a 2a 2a 2a (54)The total solution is the sum of Eq. (48) and Eq. (52). The solution for other boundaryconditions can be obtained in a similar manner, although it can get a bit mathematicallymessy.ReferencesTimoshenko, S. P., and Woinowsky-Krieger, S. (1959). Theory of Plates and Shells.McGraw-Hill.Kirchhoff and Mindlin PlatesUpdated June 10, 2019Page 10
perpendicular to that plane. The theory for plates can be regarded as an extension of beam theory, in the sense that a beam is a 1D specialization of 2D plates. In fact, the Euler-Bernoulli and Timoshenko beam theories both have its counterpart in plate theory: Kirchhoff theory for p