Transcription
PREcast Seismic Structural SystemsPRESSSVolume 3 - 09DESIGN GUIDELINESFORPRECAST CONCRETE SEISMIC STRUCTURALSYSTEMSbyJohn F. Stanton and Suzanne D. NakakiThe University of Washington and The Nakaki Bashaw Group, Inc.PRESSS Report No. 01/03-09UW Report No. SM 02-02February2002Department of Civil EngineeringUniversity of Washington,Seattle, WA 98195
AbstractThis report describes the methods that are proposed for designing five seismic structural systemsmade from precast concrete. Those five systems formed the structural framing in the PRESSSPhase III test building that was tested at the University of California at San Diego in August andSeptember 1999. Four of the five systems were based on new structural concepts, and areintended to behave quite differently from the cast-in-place concrete framing systems aroundwhich present codes are written. One of the goals of the test was to provide validation for thosesystems.The four new systems were: A precast wall, in which the individual panels are vertically post-tensioned to thefoundation and are designed to rock about their bases under seismic loading. Ductileconnections crossing the vertical joints between panels dissipate energy as they deform inshear. An unbonded pre-tensioned frame, in which the precast beams are continuous through thejoints and the columns are fabricated in one-story segments. Building drifts areaccommodated by development of a single crack in the beam at the beam-columninterface. The unbonded pre-tensioning remains elastic and closes the crack as soon asthe lateral load is removed. An unbonded post-tensioned frame, in which the precast columns are continuous throughthe joints and the beams are fabricated in one-bay segments. Building drifts areaccommodated by development of a single crack between the beam and column at theirinterface. The unbonded post-tensioning remains elastic and closes the crack as soon asthe lateral load is removed. Deformed reinforcing bars also cross the interface, but arebonded in their ducts by grouting. They yield altemately in tension and compression and,in so doing, dissipate energy. A yielding "gap" frame, in which a gap is left between the beam and column over most ofthe beam height, except at the bottom, where a grout pad joins the two. Post-tensioningalong the length of the beam line maintains a permanent clamping force between thebeams and columns. Reinforcing bars cross the gap at the top of the beam and yieldalternately in tension and compression. The concrete at the top of the beam never comesinto contact with the column. The purpose of the system is to reduce the problem ofbeam elongation during cyclic loading.In addition, a yielding frame, without gaps or pre-stressing, was incorporated in the building inorder to represent existing technology. It was constructed by grouting bars into ducts to connectthe beams to the columns. It develops its moment resistance by tension and compressionyielding of the bars.The behavior expected of each system is described, and step-by-step design procedures are givenfor the primary components of each system.
AcknowledgementsFunding for this project was provided by the National Science Foundation, PCI and PCMAC.Material assistance for the Five Story Test Building were also provided by:A.T. Curd Structures, Inc.Bautech, Co.California Field Ironworkers Administrative TrustCharles Pankow Builders, Ltd.Clark PacificCoreslab Structures, LADayton SuperiorDywidag Systems InternationalERICOFlorida Wire and Cable Inc.Fontana SteelGillies TruckingHeaded Reinforcement CorporationHorizon High ReachJVI Inc.L. G. DesignMTS Systems CorporationNielsen Dillingham BuildersNMB Splice SleevePomeroy CorporationPrecision ImageryHansen Spancrete of CaliforniaSumiden WireWhite CapThe Industrial Advisory Panel gave freely of their time and advice throughout the project, forwhich the authors are deeply indebted. The members were: Mario Bertolini, Robert Clark, NedCleland, Tom D’Arcy, Robert Englekirk, S.K. Ghosh, Jon Grafton, James Iverson, Paul JohN,Robert Konoske, H.S. Lew, Doug Lorah, Paul Mack, Robert Mast, William Michelarya, DougMooradian, John Nanna, Norm Scott, David Seagren, Fattah Shaikh, and Edward Wopschall.The PRESSS Phase III test building could not have been designed without the efforts ofGraduate Research Assistants Rebecca Hix-Collins and Joe Galusha, and Visiting ResearchEngineer Masahiro Sugata, all of the University of Washington, who conducted the detaileddesign of the building, and Graduate Research Assistants Jim Conley and Stefano Pampanin ofthe University of California, San Diego, who conducted independent dynamic analyses to predictthe performance of the building prior to the test.Last, sincere thanks are due to Nigel Priestley and Sri Sritharan, both of UC San Diego.Although their primary task was to conduct the test of the PRESSS Phase III test building, theyasked endless difficult questions and kept the design team on its toes.ii
Table of ContentsiAbstract .iiAcknowledgements .ivList of Tables .List of Figures .vChapter 1 Introduction .1-12-1Chapter 2 Development of Earthquake Loads for Design .Chapter 3 Unbonded Post-tensioned Walls .3-1Chapter 4 Unbonded Pre-tensioned Frames .4-15-1Chapter 5 Unbonded Post-tensioned Frames .Chapter 6 Yielding Frames .6-17-1Chapter 7 Yielding Gap Frames .8-1Chapter 8 Summary and Conclusions .Chapter 9 References .9-1Chapter 10 Definitions .10-1Chapter 11 Acronyms .11-1Chapter 12 Notation . 12-1Appendix A Listing of PRESSS Phase III Reportso.o111
List of Tables.Table 2.1 Over-strength Factors for Deformed Reinforcement and Pre-stressing Strand .2-12
List of Figures.Figure 1.1Figure 1.21-2PRESSS Test Building Floor Plans .1-3Pre-stressed Frames with and without Damping .Figure 2.1Figure 2.2aFigure 2.2aFigure 2.3Figure 2.4Figure 2.52-3Use of DRS to find Period Corresponding to a Target Displacement .2-4Typical Design DRS .2-4Conversion from ARS to DRS .2-5Relationship among At ,sDoF, Veq and I q .2-8Flowchart for Displacement Based Design .2-13Drift vs. Relative Strength of Resisting Elements .3-1Unbonded Post-Tensioned Split Wall .Unbonded Post-tensioned Split Wall - Location of Post-tensioning and Shear3-2Connectors .3-3Figure 3.3 Unbonded Post-tensioned Split Wall - Components .3-4Figure 3.4 UFP Shear Connector .Figure 3.5 Unbonded Post-tensioned Split Wall - Deformed Configuration at Design Drift. 3-8Figure 3.6 Unbonded Post-tensioned Split Wall - Locations of Forces at Design Drift .3-93-13Figure 3.7 Forces on UFP under Inelastic Conditions .3-15Figure 3.8 Critical Stresses and Strains in UFP Material .3-16Figure 3.9 Confinement Detail at Base of Wall .3-18Figure 3.10 Wall-to-Floor Connection System used in PRESSS Building .3-20Figure 3.11 Unbonded Post-Tensioned Split Wall at End of Test .Figure 3.1Figure 3.24-1Unbonded Pre-Tensioned Frame without Damping .Unbonded Pre-Tensioned Frame without Damping - Layout of Elements and4-1Primary Reinforcement .4-2Figure 4.3 Unbonded Pre-Tensioned Frame without Damping - Components .4-2Figure 4.4 Unbonded Pre-Tensioned Frame without Damping - Deformed Configuration .Figure 4.5 Unbonded Pre-Tensioned Frame without Damping - Forces on Connection atDesign Drift . 4-5Figure 4.6 Unbonded Pre-Tensioned Frame without Damping - Locations of Forces at Design4-6Drift .Figure 4.7 Unbonded Pre-Tensioned Frame without Damping- Interior Joint Shear Forces4-13Figure 4.8 Unbonded Pre-Tensioned Frame without Damping - Exterior Joint Shear Forces4-144-16Figure 4.9 Unbonded Pre-Tensioned Frame without Damping at End of Test .Figure 4.1Figure 4.2V
Figure 5.7Figure 5.8Figure 5.9Unbonded Post-Tensioned Frame with Damping .5-1Unbonded Post-Tensioned Frame with Damping - Layout of Elements and PrimaryReinforcement .2 .5-1Unbonded Post-Tensioned Frame with Damping - Components .5-2Unbonded Post-Tensioned Frame with Damping - Deformed Configuration .5-2Unbonded Post-Tensioned Frame with Damping - Forces on Connection at DesignDrift .5-7Unbonded Post-Tensioned Frame with Damping - Locations of Forces at DesignDrift .5-7Unbonded Post-Tensioned Frame with Damping - Interior Joint Shear Forces . 5-18Unbonded Post-Tensioned Frame with Damping - Exterior Joint Shear Forces. 5-19Unbonded Post-Tensioned Frame with Damping at End of Test .5-21Figure 6.1Figure 6.2Figure 6.3Figure 6.4Figure 6.5Figure 6.6Figure 6.7Figure 6.8Yielding Frame .6-1Yielding Frame - Layout of Elements and Primary Reinforcement .6-1Yielding Frame - Components .6-2Yielding Frame - Deformed Configuration .6-2Yielding Frame - Forces on Connection .6-5Yielding Frame - Location of Forces at Design Drift .6-6Yielding Frame - Exterior Joint, Showing Slipped Bars .6-13Yielding Frame - Exterior Joint after the Test .6-14Figure 7.1Figure 7.2Figure 7.3Figure 7.4Figure 7.5Figure 7.6Figure 7.7Yielding Gap Frame .7-1Yielding Gap Frame - Layout of Elements and Primary Reinforcement .7-1Yielding Gap Frame - Components .7-2Yielding Gap Frame - Deformed Configuration .7-2Yielding Gap Frame - Location of Forces at Design Drift .7-5Yielding Gap Frame - Beam Shear Truss Models .7-8Yielding Gap Frame near End of Test .7-11Figure 5.1Figure 5.2Figure5.3Figure5.4Figure5.5Figure5.6vi
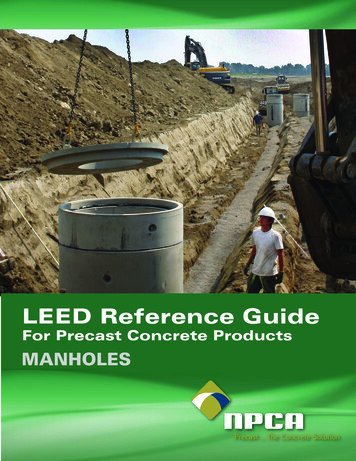
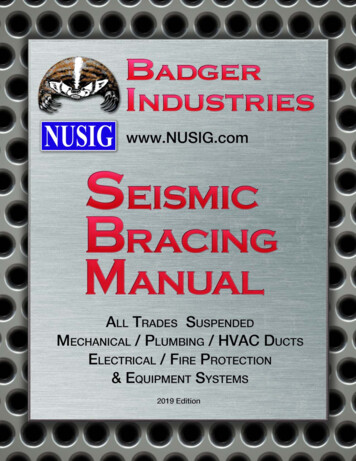
INTRODUCTION1.1 BackgroundPRESSS is an acronym for PREcast Seismic Structural Systems, a program of structuralengineering research into precast concrete building systems suitable for seismic conditions. Thatresearch was conducted jointly by researchers from eight universities, the National Institute forScience and Technology, and the practicing engineering community. The research was fundedjointly by the National Science Foundation and the precast concrete industry. Priestley [1996]provides an overview of the program. The primary goals were: To develop comprehensive and rational design recommendations needed for broaderacceptance ofprecast concrete construction in different seismic zones. To develop new materials, concepts and technologies for precast concrete construction indifferent seismic zones.The program consisted of three phases. In Phase I, fundamental concepts were developed. InPhase II, laboratory tests were conducted on connections and sub-assemblages. In Phase III, acomplete building was designed, using the concepts and connections developed in the earlierphases, and was tested under lateral loading.This report summarizes the design methods associated with the five seismic framing systemsincorporated in the PRESSS Phase III test building.That building was 60% full scale, and was two bays long, two bays wide and five stories high.Typical floor plans are shown in Figure 1.1. The building derived its lateral resistance from twoperimeter frames in the north-south direction and from a central spine wall running east-west.The frame on the east side of the building contained two different framing concepts that relied onpre-stressing, while the west one consisted of two non-pre-stressed systems. The wall was posttensioned to the foundation. Two flooring systems were used; the lower three floors wereconstructed from pre-topped double-tees while the upper two floors used hollow-core with acast-in-place topping.The precast seismic systems used in the test building possess several novel features [Nakaki et al.1999]. First, they all take advantage of the jointed nature of precast concrete construction byconcentrating the deformations in the connections. By this means the deformations in, andtherefore the damage to, the members themselves is minimized. This approach openspossibilities of true performance-based design by giving the designer tools with which to controlthe level of damage caused by an earthquake. Second, several of the systems re-center after thelateral loading is removed, leading to essentially zero residual drift. These characteristicsconstitute performance that is superior to the life-safety-only requirements of traditional buildingcodes. In particular, they provide the engineer with tools to design for low repair costs and earlyre-use of the building after an earthquake. Last, the systems require the use of no unfamiliar1-1
technologies, but rely for their functioning on new arrangements of existing materials. Thisshould help them to gain acceptance in the construction community.Double Tee Floor15’-0"Hybrid FrameN TCY Gap FrameHollowcore FloorPreTemioned FrameActuator Connection PanelTopped Hollow CoreActuator Connection Panel Topped Hollow CoreActuator Connection PanelTCY FrameFigure 1.1: PRESSS Test Building Floor Plans(Courtesy Prof Sri Sritharan)1-2
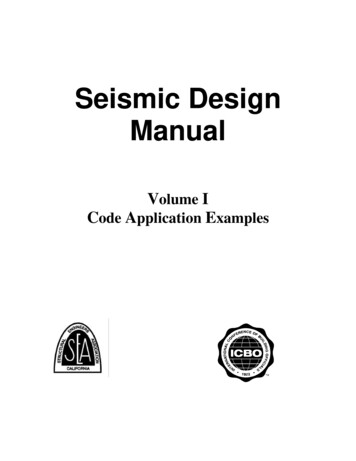
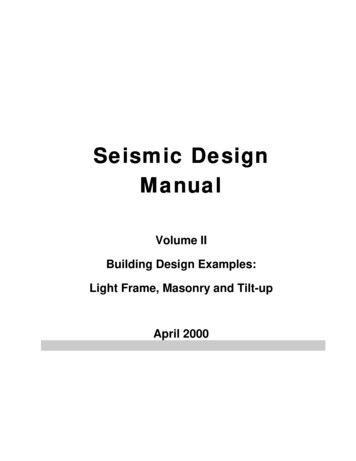
More detailed information on the design, construction and testing of the PRESSS Phase III testbuilding may be found in the reports listed in Appendix A.1.2 Pre-stressed Framing SystemsSome of the precast seismic framing systems contain pre-stressed reinforcement that is unbondedover part or all of its length. The pre-stressing may be achieved by pre- or post-tensioning. Theframes may also contain some deformed bar reinforcement to dissipate energy through yieldingin tension and compression. Thus four combinations are possible, and are illustrated in Figure1.2. They are: A post-tensioned frame without dampingA post-tensioned frame with dampingA pre-tensioned frame without dampingA pre-tensioned frame with utDampingFigure 1.2: Pre-stressed Frames with and without Damping.The PRESSS Phase III Test Building contained only two of the four: the post-tensioned framewith damping and the pre-tensioned frame without damping. However, the results obtained fromthem are considered adequate to show that the basic concepts for all four types are valid.1-3
Priestley and MacRae [1996] tested several post-tensioned frame connections without damping,and achieved satisfactory results. The post-tensioned system without damping is designed in thesame way as the pre-tensioned system without damping of Chapter 4, except that the crackingmoment does not need to be evaluated since the interface is pre-cracked.At the time of writing no pre-tensioned frame with damping has been tested. However, itsbehavior is expected to be similar to that of damped post-tensioned precast frame described inChapter 5, and it should be designed according to the principles presented there.1.3 Format of the ReportThis report is divided into five main chapters (Chapters 3-7), each of which describes a singlesystem and is largely autonomous. Each of those chapters presents, for the system that itaddresses, the design concept, the design procedure, important construction issues and a briefdiscussion.Preceding these main chapters is Chapter 2, which discusses the derivation of earthquake loadsand the appropriate limit states. That information is included because the test building wasdesigned using displacement-based methods, which may be unfamiliar to some designers.At the end of the report are a list of acronyms, a list of definitions, and a list of symbols. Inaddition, all symbols are defined in any chapter in which they are used.1.4 NotationThe notation used in this report does not correspond to that used in any single code or standard.While much of it follows ACI notation, differences exist. There are several reasons for thedivergence. First, the material contained herein must be read in conjunction with severaldifferent published documents, all of which use different notation. Second, ACI notation doesnot use a consistent set of subscripts. For example, pre-stressed reinforcement is sometimesindicated by the subscript "p", (as in fpy) and sometimes by the subscript "s" (as in fse). In thisreport, the need to distinguish between pre-stressed and non-pre-stressed reinforcement isparamount, so such anomalies were considered unacceptable.Inasmuch as possible, the notation adheres to the following principles. Greek symbols representdimensionless coefficients or ratios. Roman symbols represent variables that carry dimensions.Of the latter, stresses are given by lower case letters and forces by upper case letters. Subscripts"p" and "s" refer to pre-stressed and non-pre-stressed steel reinforcement respectively.Subscripts "0" and "des" refer to the zero drift state and the design limit state respectively.1-4
2 DEVELOPMENT OF EARTHQUAKE LOADS FOR DESIGNThe PRESSS Phase III Test Building was designed using Displacement Based Design [Priestleyand Kowalsky, 2000]. This is a relatively new approach to developing seismic design loads thatprovides a rational alternative to the Force-Based Design procedures that are required by almostevery contemporary code. In the interests of providing a background on "the environment inwhich the design equations presented in the following chapters were developed, this chaptercontains a brief discussion of Force and Displacement Based Design methodologies.2.1 Force-Based DesignForce Based Design procedures for computing seismic loads are contained in current designcodes, such as the UBC ["Uniform" 1997], the NEHRP provisions [NEHRP, 2000] and the IBC["International", 2000]. The most commonly used approach is the Equivalent Lateral Force(FiLF) procedure, in which the elastic response to the design earthquake ground motion is firstcomputed using assumed values of stiffness, after which it is modified using empirical factors toapproximate the effects of inelastic response. An estimate of the drift under the design loading isobtained by computing the drift of an elastic model of the structure under the design load, thenmodifying that by an empirical factor to account for the influence of inelasticity.2.2 Displacement-Based Design2.2.2 OverviewDisplacement Based Design (DBD) embodies the philosophy that a structure should be designedto achieve a specified drift during a specified ground motion. The strength of the structure isthen selected by rational means to ensure that this goal is met. The displacement is the keyparameter, and the loads are derived from it. This approach is essentially the reverse of thetraditional Force Based Design (FBD), in which the loads are derived first and an estimate of thedrift is then obtained from the computed loads.Priestley [2000] has described the Displacement Based Design method in some detail, so only asummary is given here. The method has its origins in the work of Gulkan and Sozen [1974] andShibata and Sozen [1976], but has undergone considerable development since then [Priestley andKowalsky, 2000], and is now incorporated into the SEAOC Recommended Lateral ForceRequirements ["Tentative", 1999] as a viable approach to determining seismic loads.Two important assumptions underlie it:First, the response of the structure is dominated by a deformed shape that resembles thefimdamental inelastic mode shape. This is essentially the same assumption as is made in theEquivalent Lateral Force embodiment of existing force-based design. It generally leads to a2-1
reasonable description of the building and story drifts but, because it excludes higher modeeffects, it cannot be used alone to calculate individual story forces and the correspondingfloor-to-frame connection forces. The inelastic mode shape is defined in the same way as anelastic mode shape, namely the shape that leads to identical distributions of load andresponse. However the inelastic shape is not a mode shape in the sense of an eigenvector to alinear system, because it lacks some of the properties, such as orthogonality, of a true modeshape. The shape also varies with the intensity of the applied toad. In DBD, a shape ischosen that approximates the displaced shape of the inelastic system at the design load.Second, the peak displacement of an inelastic SDOF system is the same as that of a viscouslydamped elastic system if the two have, at peak drift, the same secant stiffness and energydissipation per cycle.2.2.3 Notation area of hysteresis loop area of rectangle circumscribing hysteresis loopArect vector with elements 1.0 in DOFs parallel to ground motion and 0.0 elsewhere ratio of inelastic to elastic driftCa specified strength ofpre-stressing tendon material specified yield strength of pre-stressing tendon material specified yield strength of deformed reinforcementK-- stiffness of SDOF system secant stiffness of true hysteretic system at maximum displacementL earthquake participating mass mass of SDOF systemM[M] mass matrix-- generalized mass in first modeM*Mcap,tot total moment capacity moment capacity provided by pre-stressed reinforcementMcap,pMcap,s moment capacity provided by yielding reinforcementMcap,tot total moment capacity effective mass in first mode resisting moment provided by compression deformed reinforcement at design limitMs ’,desstateR seismic response modification factorS spectral accelerationSa spectral displacementT-- period of linear elastic SDOF systemTeq period of equivalent viscously-damped linear SDOF system design base shearVdes design base shear of equivalent viscously-damped linear systemVeq peak shear experienced during pushover analysisVmaxAloopF earthquake participation factor2-2
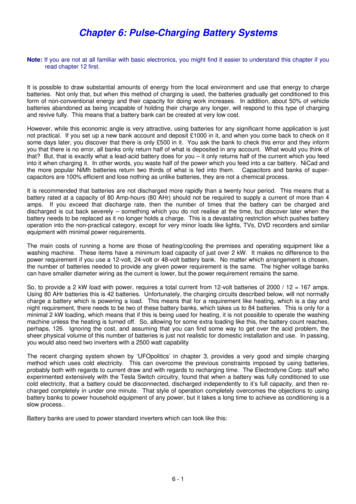
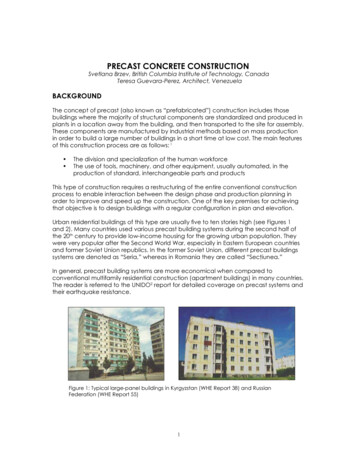
inelastic drift of structure under reduced earthquake load in 1997 UBCelastic drift of structure under reduced earthquake load in 1997 UBCAtar,MDOF target displacement for MDOF systemAtar, SDOF target displacement for SDOF systemOdes design interface rotation, consistent with design moment, MdesX over-strength factorover-strength factor for pre-stressed reinforcement in tensionXpover-strength factor for deformed reinforcement in tensionLsover-strength factor for deformed reinforcement in compression s’viscous damping eqviscous damping in equivalent linear systemcalculated viscous damping in equivalent linear system eq,calcestimated viscous damping in equivalent linear system eq,est{ )eq}equivalent mode shape, or assumed deformed shapenatural frequency of SDOF systemnatural frequency of equivalent linear SDOF systemO)eq2.2.4 ProcedureThe core of the DBD method may be explained most easily by considering the simplest case of aviscously damped linear Single Degree-of Freedom (SDOF) system in which the system massand damping are assumed to be known. The objective is to design the system so that it willreach a specified displacement (the design displacement, Atar, SDOF) when subjected to a specifiedground motion. The procedure is illustrated in Figure 2.1.Displacement Response SpectrumAtar,SDOFPeriodFigure 2.1: Use of DRS to Find Period Corresponding to a Target Displacement2-3
It requires the elastic Displacement Response Spectrum (DRS) for the ground motion inquestion. This can easily be obtained from the traditionally used Acceleration ResponseSpectrum (ARS) for the motion by dividing each ordinate of the ARS by c02, sinceSaSd - co---5- .(2.1)Figure 2.1 shows curves typical of a DRS for a specific ground motion. For design, the DRS islikely to be idealized by a series of smooth curves or lines, such as shown in Figure 2.2a. Theconversion from ARS to DRS is illustrated for a typical design spectrum in Figure 2.2b.{ 5%lO%30%Period, TFigure 2.2a. Typical design DRSiARS (S,). 2 SoDRS (Sd)Period,Figure 2.2b. Conversion from ARS to DRSThe design calculations consist of entering the DRS with the design displacement, Atar, SDOF, andfinding the period, T, that corresponds to it. The curve corresponding to the correct damping forthe system relates the displacement and the period. The required stiffness can then be obtainedfrom the period, T, and the known mass, M, because2-4
K Moo2 M .(2.2)Once the required stiffness is known, the member sizes can be selected and the design iscomplete.If the true system is hysteretic, rather than elastic, the procedure must be augmented by a secondstep that relates inelastic and elastic behavior. The (SDOF) hysteretic system is approximated byan equivalent viscously damped one. The two are equivalent in that the stiffness of the elasticsystem is the same as the secant stiffness of the inelastic system at the design drift. The viscousdamping is selected to give the same energy dissipation per cycle as exists in the hystereticsystem at peak drift. The hysteretic energy dissipation per cycle, and therefore the equivalentdamping, is assumed here to be known at the start of the design. (A modification to address thecase in which it is not known is described below). The DRS is entered, as before, with Atar,SDOVto find a period. The resulting period is Teq, the period of the equivalent elastic system that, whencombined with the known damping, will result in the desired Atar,SDOF. The equivalent stiffness,K q, corresponding to Teq, is then computed fromM( 2rc l .(2.3)An elastic system with this stiffness will result in the desired displacement, Atar, SDOF. Therequired strength of the real hysteretic system can be obtained from the equivalent elastic one byreference to Figure 2.3 and Equation 2.4.DisplacementAtar,SDOFFigure 2.3 Relationship among Atar,SDOF, Veq and Keq.Veq KeqAtar,SDOF .;.(2.4)2-5
Since Atar, SDOV was selected by the designer, and is therefore known, Veq can be computeddirectly from Equation 2.4.Once the required strength, Veq, has been computed, the member sizes can be selected and thecomplete load vs. displacement curve can be constructed. The area inside the hysteresis loop isequal to the energy dissipated per cycle, from which the
PRESSS is an acronym for PREcast Seismic Structural Systems, a program of structural engineering research into precast concrete building systems suitable for seismic conditions. That research was conducted jointly by researchers from eight universities, the National Institute for Science