Transcription
Army Ground Robotics Overview:OSD Joint Technology Exchange Group24 April 2018Mark MazzaraRobotics Interoperability LeadPM Force ProjectionDistribution A: Approved for Public Release
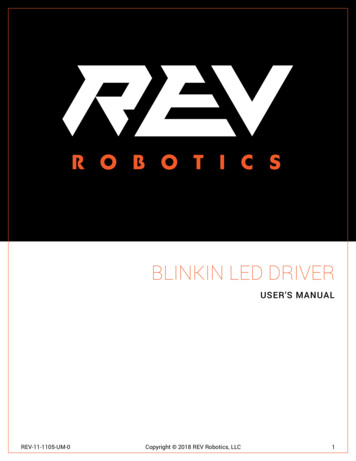
PEO CS&CSS Robotics PortfolioM160 Light FlailRoute Clearance &Interrogation SystemLeader/FollowerSemi-Autonomous ControlRobotic Enhancement ProgramMan-Transportable RoboticsSystem Increment IINon-Standard EquipmentCommon RoboticSystem IndividualCommon Robotic System Heavy*Squad MultipurposeEquipment Transport*Next Generation Combat Vehicle– Unmanned(a.k.a. Robotic Combat Vehicle)Enhanced Robotics Payloads*Automated Convoy Operations3MTRS MK II MOD I(Talon IV RESET)Dragon RunnerMTRS MK II MOD II(Talon 5A)FirstLookTALON IV CBRNeSUGV 310 Mini-EOD* Images are conceptual representations, not endorsementsDistribution A: Approved for Public Release2
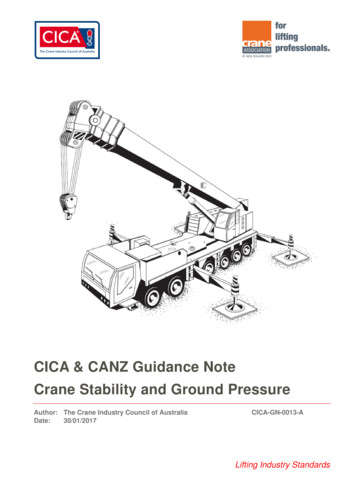
MTRS Inc II Program Overview / UpdateMTRS Operational ViewRTE CLEARMinesxMTRSICo HQMTRSMinesRTE CLEARMTRS The Man Transportable Robotic System (MTRS) Inc IIis a remotely operated, man-transportable, roboticsystemTask / Mission / DescriptionMan Transportable Robotic System (MTRS) Increment (Inc.) II contributes directly tothe Detect, Protect and Neutralize fundamentals by providing standoff hazardsinterrogation, detection, confirmation and neutralization capability employed tosupport a wide spectrum of mobility missions for current and future forces byproviding required standoff capability across the War-fighting Functions. Through theintegration of sensor modules with this capability, Soldier lives are saved byprojecting efforts to defeat these threats to the force by providing standoff from thesehazards.Mines Provides a standoff capability to interrogate, detect,confirm and neutralize presence across War-fightingfunctions Capability to identify and disposition explosivehazards Army’s medium sized common platform allowing useof various platform payloads in support of current andfuture missions* AAO includes EOD requirement of 587 CPD: Approved, 15 MAY 2013 RFP Released: 09 NOV 2016 Contract Award: September 2017 First Unit Equipped: 4QFY19 AAO: 1,210 Users: Engineer, CBRN and EODDistribution A: Approved for Public Release3
Common Robotic System (Individual) {CRS(I)}System Description: A man-packable ( 25lbs), miniature, highly mobile, unmanned robotic system with advanced sensors and mission modulesfor dismounted forces. Designed so that operators can quickly reconfigure for various missions by adding/removing modules and/or payloads.Common Robotic Platform Enabling Payloads to Address the Operational Capabilities Gaps: Standoff short range Intelligence, Surveillance, & Reconnaissance (ISR) Remote Chemical, Biological, Radiological, and Nuclear (CBRN) detection Remote Explosive Obstacle Counter Measure (EOCM) Remote Explosive Ordnance Disposal (EOD) operations Remote clearance of danger areasUsers: INF, CBRN, ENG and EOD (EOD equals ENG payload; no unique requirement)Entire CRS(I)Systemrequired to fitinto singleLarge MOLLE AAO: 3,258 (Does not include Marines) RFP Released: 16 May 2017 Milestone B: 26 March 2018 EMD Contract Award: 30 March 2018 Milestone C: 2QFY19 FUE: 2QFY20 IOC: 3QFY21IOP V2.0 CompliantEMD contract awarded to Endeavor & QinetiQ on 30 March 20184Distribution A: Approved for Public Release4
Squad Multipurpose Equipment Transport (SMET)System Description: The SMET provides the small unit with the ability to support squad and platoonoperations for 72 hour missions. Provides unmanned or optionally manned internal resupply capability to thesmall unit.SMET Capabilities: Carry up to 1000 lb. of Soldier gear Operate for 60 miles within 72 hours without external resupply Provides mobile power generation capability to the small unit Operable with remote control with options for Follow-me, Teleoperation and Operator Control Unit Acquisition Category (ACAT):II (Pre-MS C) Acquisition Objective (AAO): 5723 Program of Record (POR) Acquisition Cost: 100K each Directed Requirement: 3QFY17 Urgent Material Release (UMR) of DirectedRequirement: 4QFY18 Capability Production Document (CPD): 1QFY20 Milestone C: 1QFY20Distribution A: Approved for Public Release5
SMET Directed Requirement StatusDistribution A: Approved for Public ReleasePhase I – Vendor Solution Assessment Successfully completed 5 weeks of testing with 7Contractors (8 platforms)2 Contractors ran tests in parallel–– 5 days of testing for each contractor– Separate, secure staging areasOffset testing schedules24 hour range access and Governmentsupport/supervisionContractors operated their own systems through thetests using remote control onlyPass/fail and weighted scores assessed for each test;used as phase II down select criteriaPhase II – Operational Technology DemonstrationSelected Platformsx20x20 Phase II IBCT Locations–– Contractor Requirements–Howe & Howe - PUNISHERx20ARA/Polaris – MRZR-Xx20GDLS - MUTT–––––HDT – WOLF1/101st at Fort Campbell, Kentucky1/10th at Fort Drum, New York–Dedicated Field Service Representatives (FSR) at ATC andboth IBCT locationsProvide Contractor Logistics Support (labor, spare parts,supplies, and tools)Operator Training Support PackageCommercial Off-The-Shelf Operator ManualOperator Task VideosConduct Operator New Equipment Training (24curriculum hours for 12 students)Participation in a Government-led T&E WIPT6
CRS(H) Program OverviewSystem Description:The CRS(H) is the Army’s large sized, vehicle transportable, commonrobotic platform capable of accepting various mission payloads enhancingprotection to the EOD Soldier by providing increased standoff capability toidentify, render safe and dispose of explosive ordnance and improvisedexplosive devices in support of the Range of Military Operations andHomeland Defense operations.Emerging Threshold Performance : Manipulator Arm Lift Capacity Close to Platform 275 lbs; Full Extension (72 in) 100 lbs Platform Speed 6 mph Obstacle Clearance 32 in (Jersey Barrier) Platform Endurance 7 hrs Weight 700 lbs curb weight, 1000 lbs gross system weight(includes 300 lbs of non-native payloads) Interoperability – IOP compliant Cyber Hardened CPD: Projected April 2018 RPP Released: Projected 3QFY18 Contract Award: Projected 4QFY18 Fly-Off: SEP - OCT 2018 (T) AAO: Projected 248 Target AUMC: TBD Users: EOD and CBRN* Images are conceptual representations, not endorsementsDistribution A: Approved for Public Release7
CRS-H Acquisition Strategy(Emerging Insights) OTA Fly-Off: Phase IEvaluate vendor proposals and down-select (up to 5) toparticipate in a fly-offCandidate systems put through operational demonstrations––– 5 days per vendor with same evaluation teamVendors bring (1) system; only FSR’s will operate the system in accordance withcurrent EOD TTPsGov’t team (incl. user) will observe and evaluateVendors will be provided Gov’t assessment two weeks aftercompletion of eventSEP-OCT 2018 at Fort Leonard WoodExecute under REP 18.2* Images are conceptual representations, not endorsementsOTA Fly-Off: Phase II – ATEC/User Evaluation Down-select (up to 2) to participate in ATEC/User evaluation–––– Proposals based on Fly-off #1 results; include cost for (3)production representative systems, data to support safetyconfirmation and logistics developmentSystems (x2) will be put through both safety testing and useroperationAdditional system (x1) will be utilized for concurrent logisticsdevelopmentMay-JUN 2019 at Aberdeen test Center (APG)Evaluations will inform follow-on production phaseDistribution A: Approved for Public Release8
CRS-H Acquisition StrategyEmerging Insights (Cont)OTA Production Phase Fly-Off #2 participants submit finalproduction proposalDown-select from two OEM’s to onepending:–––––– Performance DataTechnical ProposalCost ProposalSafety AssessmentUser EvaluationProduct Support Assessment* Images are conceptual representations, not endorsementsProduction award to one OEM (Targetaward - JUL 2019)Immediate fielding under CMRFMR achieved within two yearsRapid fielding of critical capabilities9Distribution A: Approved for Public Release
Enhanced Robotic Payloads (ERP)System Description:The ERP is a suite of modular capabilities designed with openarchitecture to provide an increased level of standoff, situationalawareness, disruption capability and dexterity to respond to currentand emerging Engineer, CBRN and EOD requirements. Thesemultiple, modular robotic mission payloads will use open architectureto integrate with the MTRS Inc II and CRS(H) platforms to form theArmy’s next generation platform adaptable robotics systems.Capabilities*: Dual Arm Dexterity Multi-Shot Disrupter Fine Precision Aiming Module Multispectral Overlay Camera Obstacle Avoidance & Digital Modeling Extended Range Radio & Mesh Networking Extended Range UAV & Surveillance CDD Approval: 4QFY18/1QFY19 RFP Release: TBD AAO: Projected 743 Users: CBRN and EOD* Only obstacle avoidance & mapping andextended range/mesh networking will befielded to CBRN units* Images are conceptual representations, not endorsementsDistribution A: Approved for Public Release10
Leader Follower Operational TechnologyDemonstrationLeader Follower is a robotic applique kit toprovide an optionally manned capability tocurrent Tactical Wheeled Vehicles (TWV)FY16FY17FY18FY20Increment IIDeliverablesDirectedRequirementIncrement IDeliverablesPrototype Build MaturationBuild, Test 10 LFMeasure/TestATECMeasurementReportToday FY19UMRBuild & Issue 60LF PLS to UnitsFUIOp Tech DemoFOLLOWERFY21FY22FY23FY24Decision Point:Approve CPD andEnter MS CMS CFMRFRPLRIPFUEProduction (5 year) to FY27Build RemainingLRIP TrucksFOLLOWERFOLLOWERLEADEROperational Evaluation with Soldiers at Camp Grayling on 11-22 SEP 2017Supported by (7) Soldiers from Army’s 1st Armored Division out of Ft. Bliss, TXEvaluation included: Driver Warning/Assist TeleoperationLeader Leader FollowerFollowerDistribution A: Approved for Public Release11
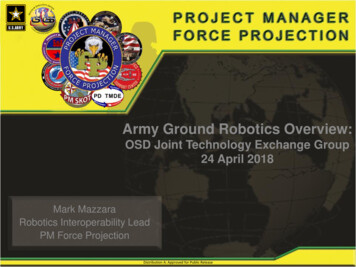
Autonomous Trucks Testing:“Long Tail” of Use-CasesUse case variables include:Number ofTimes Use-CaseWill Occur OverLifecycleOperations:Wartime - High Intensity (7-day Surge)Wartime - Low Intensity (30-day Period)Peacetime - Low Intensity (240-day Period)Hauling:Local HaulLine HaulTerrain:Primary Roads High Quality Paved Secondary Pavement Rough Pavement Degraded Rough Pavement Highly DegradedSecondary Roads Loose Surface Washboard & Potholes Belgian BlockOff-Road Trails Rough TrailsSpeeds:45 - 55 mph Primary Roads30 - 45 mph Secondary Roads10 - 30 mph TrailsObstacles:5 - 15 mph Rough TrailsStaticMobility:Trees larger than 4” diameter and 2ft.Dry (Sand)above ground levelWet (Rain)Boulders larger than 18”L xSnow10”Wx18”HCargo Loads:Fire HydrantsFull LoadDynamicPartial LoadOncoming TrafficNo LoadBlind-side Passing TrafficFull Load w/trailerHumans (minimum 36” tall)Partial Load w/trailerLarge Animals (e.g.No Load w/trailercamels/cows/horses/or larger)Climate:Herds of small farm animalsHot (Desert)(sheep/goats/geese)Basic (Mild)Cold (Arctic)Tropic (Jungle)Serial Size (Follower Positions):3 - 7 Follower PositionsEach point on theline represents aunique use-case.Increasing Frequency of OccurrenceUnique Use-Cases“long tail” of use cases: cost driver for achieving reliabilityFor manned systems, testing organization (ATEC/OTC) trusts humandriver’s decision making process to address these use-casesDistribution A: Approved for Public Releaseuse-cases alreadydemonstrated12
Placeholder – Dr. Sadowski Slide 2 How Can Modeling &Simulation Help?Distribution A: Approved for Public Release23-Apr-18131315
AMERICA’S ARMY:GLOBALLY RESPONSIVEREGIONALLY ENGAGEDRCV Major Technical HurdlesIn order to accelerate unmanned combat platforms there are three major technicalhurdles to overcomeRemote LethalityUnmanned ManeuverCross country maneuver atoperationally relevant speedsNetworkPlan on utilizing commercial communicationsystem to support field experiments untilmilitary multi-band capable radios areavailableAutoloader for Main Armament SystemReliable semi-autonomous behaviorsSafety certification for Soldier useRequire low latency, secure highbandwidth communicationsRemoting Manual Fire Control ProcessesRobust by-wire actuation of mobility systemsCorrecting Targeting Solutions Basedon LatencyIntuitive Human Machine Interface betweenoperators and unmanned platformsHow Can Modeling &Simulation Help?Distribution A: Approved for Public Release14
Robotic Combat Vehicle (RCV) Considerations What mission? What system? What would the human machine interface considerationsbe for manual teleoperation? What should be the role of the human versus themachine? What decisions can be made by the machine and whatdecisions require a human? What subsystems should be automated? How does the RSTA mission change based on newtechnology? What about other missions?How Can Modeling &Simulation Help?23-Apr-1815Distribution A: Approved for Public Release15
RAS-G IOPs Basic Overview Robotics &AutonomousSystems, Ground(RAS-G)InteroperabilityProfiles (IOPs) Defines softwaremessaging &hardware interfacesbetween majorsubsystems ofunmanned groundsystemsIOP V3.0 Release February 2018Distribution A: Approved for Public Release16
RAS-G Modularity SMC17IOPControllersUSMCDistribution A: Approved for Public ReleaseIOPArmyNavy17
Existing Universal ControllerRequirements & ArchitectureShort Range Recon (SRR)RQ-11 Raven(MRR)RQ-20 Puma(LRR)Distribution A: Approved for Public ReleaseLethal ManeuverAerial MunitionSystem (LMAMS)Architecture Extensible toRAS ICD SystemsPD-100 / SoldierBorne Sensor(SBS)IOP/JAUSAcronyms:IOP: Robotics & AutonomousSystems, Ground (RAS-G)Interoperability Profile (IOP)JAUS: Joint Architecture forUnmanned Systems (JAUS)MOCU: Multi-OperatorControl UnitSMETLightReconnaissanceRobot (CRS(LR))CRS(H)CRS(I) (includingUniversal Controller)currently in EMDPhaseMTRS Inc IIMTRS MK IICRS(I)All graphics are notional to convey the general size and type of systemCRS(I) Universal Controller CDD Language: 6.2.2(U) KPP 6 - Unmanned System Control.The CRS (I) OCU must have the ability to achieveand maintain active and/or passive control of anycurrent Army and Marine Corps PoR battalionand below level Unmanned (Air or Ground)System (UxS) and/or their respective payloads inless than three (T), one (O) minute(s). 1818
Value of CommonalityGraphics are notional to conveythe general size and type of systemInteroperabilityProfiles (IOPs)Acronyms:IOP: Robotics & AutonomousSystems, Ground (RAS-G)Interoperability Profile (IOP)Defines hardware & software interfacesbetween major robotic subsystemsJAUS: JointArchitecturefor UnmannedSystems (JAUS)CommonPayloadsMOCU:Multi-OperatorControl YCBRNERPSPAWARMOCU 3.0/4.0CRS(I) Universal ControllerCDD Language: 6.2.2 (U) KPP 6 Unmanned System Control.The CRS (I) OCU must have theability to achieve and maintainactive and/or passive control ofany current Army and MarineCorps PoR battalion and belowlevel Unmanned (Air or Ground)System (UxS) and/or theirrespective payloads in less thanthree (T), one (O) minute(s).CRS(H)SMETMTRS Inc IITalon 5aDistribution A: Approved for Public ReleaseCRS-I19
Unique Wireless Comms Requirements Data rate: 2 Mbps– Driven by streaming video requirements Encoding, Resolution, Color Depth, Frame Rate, Multiple Simultaneous Streams Ground-to-Ground LOS/NLOS Distance/Range of 1km– Can’t rely on commercial cellular data towers Latency 250 msResistant to JammingSpectrum AgileChannel SelectableLow SWaPData RateDistance/Rangein crowdedenvironmentLatencyperformance– Low power consumption for extended battery operation– Weight and size Compliant with latest version of RAS-G IOP Cybersecurity Hardened Low Detectability23-Apr-18Distribution A: Approved for Public Release2020
Dexterous Manipulators / Specifying ManipulatorPerformance Robotic arms & manipulators (grippers, hands, etc) can bedifficult to articulate requirements forImages from Google search for “Public Domain ”What does a good performance spec look like?TooLoose23-Apr-18Distribution A: Approved for Public ReleaseOptimalTooConstraining2121
Managing a System w/ Uncertain Behavior How do you specify requirements for a system that willencounter new situations that may result in unexpected orunplanned for behavior? How do you test a system that will encounter newsituations that may result in unexpected or unplanned forbehavior? How do you specify requirements for a system that learns? How do you test & characterize a system that learns?Education SystemsReport Cards23-Apr-18Distribution A: Approved for Public ReleaseDriver’s License2222
Potential Ground Robotics Applications forMaintenance & Sustainment(Quick Brainstorm) Remote system operation– Nuclear contaminated facilities– Ship inspection, maintenance & repair– Bridge inspection Hard to reach access or delicate operations– Performing of (maintenance) tasks in close quarters (e.g., on ship))– Changing scale (i.e. miniaturizing surgical hands a la Da Vinci) Automated operation– Repetitive tasks – material integrity inspection– Painting, surface removal, etc.– Road repair? Sensors & intelligence– Machine vision: subtle pattern recognition for quality inspection– Predictive analytics for CBM Sustainment Mission (Combat Support)– Construction equipment – forklifts, dozers, graders, airfield repair, etc.– Material handling equipment23–MaterialresupplyDistribution A: Approved for Public Release23
DiscussionDistribution A: Approved for Public Release24
Requirements & System Definition CascadeExplosive HazardDefeat ICDInformed by mission,threat, etc.Controlled byTRADOCOperationalBaselineCRS(H) CPDInformed by operationalrequirements, current state oftechnology, cost/availability ofsystemsSystem LevelFunctional Performance SpecBaselineControlledby PMCRS(H) Performance Spec(Not defined by CRS(H) PoR)AllocatedPerformance SpecsInformed by performance specrequirements & allocations,designs, manufacturability,cost, IPProduct Baseline(Example of what final productbaseline could look like)Robotic PlatformRadioRelayPTZCamerasChassisCamerasUC Hardware ShellWheels/TracksRadiosIOP Interfaces10 DOF ArmEtc.GripperEtc.23-Apr-18NativeManipulator ArmAutonomySoftwareMOCU 4ERP DisruptorUniversalController(UC)EOD RoboticPayloads (ERP)TDP or ProductBuild SpecificationsOwned by OEMTDP or ProductBuild SpecificationsOwned by ThirdParty ManufacturerTDP or ProductBuild SpecificationsOwned by Gov’tEtc.2525
Framing the Army’s Robotics and AutonomousSystems (RAS) StrategyAs the Army articulates RAS integration across multiple Warfighting Functions, this vision mustalso show realistic objectives in the near-term, feasible objectives in the mid-term, andvisionary objectives for the far-term. Beginning with near-term objectives, each successivephase links its objectives to and builds from the achievements of the previous phase.Near-Term Vision- AdaptMid-Term Objectives: Technologies improve the autonomy of unmanned systemsTechnologies will enable unmanned cargo deliveryRobots act as “teammates” rather than toolsMicro autonomous air and ground systems will also enhance Platoon,Squad, and Soldier situational awarenessMid-Term Vision (F2025)- EvolveSource for All Listed Objectives:TRADOC Pam 525-3-1, ArmyOperating Concept, Appendix C-2.Near-Term Objectives: Leader-Follower ConvoyTechnology Employment Lighten the Soldier load Enhance stand-off fromthreats and improvesituational awarenessFar-Term Vision- InnovateFar-Term Objectives:Technologies will enable manned andunmanned teaming in both air andground maneuver though investmentsin scalable sensors, scalable teaming,Soldier-robot communication, andshared understanding throughadvancements in machine learning.Distribution A: Approved for Public Release26
PM FP Cybersecurity ConsiderationsPM FP needs i
Apr 02, 2018 · Platform Speed 6 mph Obstacle Clearance 32 in (Jersey Barrier) Platform Endurance 7 hrs Weight 700 lbs curb weight, 1000 lbs gross system weight (includes 300 lbs of non-native payloads) Interoperability –IOP compliant Cyber Hardened