Transcription
ESTÁTICA
ESTÁTICAJacqueline Rodríguez AguileraTecnológico de Estudios SuperioresJilotepecPRIMERA EDICIÓN EBOOKMÉXICO, 2014GRUPO EDITORIAL PATRIA
mxDirección editorial: Javier Enrique CallejasCoordinación editorial: Estela Delfín RamírezProducción: Gerardo Briones GonzálezDiseño de interiores y portada: Juan Bernardo Rosado SolísIlustraciones: Gustavo Vargas M. y Jorge Martínez J.Fotografías: ThinkstockphotoDiagramación: Gustavo Vargas M. y Jorge Martínez J.Revisión técnica:M. en C. Sergio Saldaña SánchezInstituto Politécnico NacionalM. en C. Hugo Gustavo González HernándezInstituto Tecnológico y de Estudios Superiores de MonterreyEstáticaDerechos reservados: 2014, Jacqueline Rodríguez Aguilera 2014, GRUPO EDITORIAL PATRIA, S.A. DE C.V.Renacimiento 180, Colonia San Juan TlihuacaDelegación Azcapotzalco, Código Postal 02400, México, D.F.Miembro de la Cámara Nacional de la Industria Editorial MexicanaRegistro Núm. 43ISBN ebook: 978-607-438-911-1Queda prohibida la reproducción o transmisión total o parcial del contenido de la presente obraen cualesquiera formas, sean electrónicas o mecánicas, sin el consentimiento previo y por escrito del editor.Impreso en MéxicoPrinted in MexicoPrimera edición ebook: 2014
DedicatoriaA mis padres Indalecio y Rosaura por todo su amor.
AgradecimientosAgradezco a mi esposo Roberto y a mis hijos Jacqueline y Robertopor toda la paciencia, tolerancia y amor que me dierondurante la realización de esta obra.Agradezco a la ingeniera Estela Delfín Ramírezpor darme la oportunidad de hacer realidad un sueño,así como todo su apoyo y paciencia.VII
PresentaciónEsta obra está formada por cuatro unidades y pretende ser de gran utilidad para los estudiantes deingeniería, pues contiene una gran cantidad de problemas resueltos que muestran paso a paso loscálculos realizados para llegar a la solución, haciendo uso de conocimientos básicos necesarios comoaritmética, geometría, álgebra y trigonometría, así como también una gran cantidad de problemas propuestos para que se apliquen los conceptos de la estática, los cuales se abordan con gran simplicidadpara su fácil comprensión. La primera unidad aborda temas fundamentales como las leyes de Newton, los sistemas de unidades, vectores y equilibrio de la partícula, puesto que estos temas se aplicarán en la mayoríade los problemas de los siguientes capítulos.La segunda aborda temas como equilibrio de cuerpo rígido, momento de una fuerza y sistemasequivalentes de equilibrio. Se hace una clara diferencia entre el equilibrio de una partícula yel de un cuerpo rígido, aplicando conceptos como el principio de la transmisibilidad y fuerzasconcurrentes y coplanares.En la tercera unidad se aplican las leyes de Newton, para entender los conceptos de acciones yreacciones, aplicándolas en estructuras tales como vigas, armaduras, marcos y cables en formade cargas y apoyos.En la cuarta y última unidad se calculan las propiedades de secciones planas, tales como centroides, momentos de inercia, radios de giro y módulos de sección, entre otros, como conceptos abstractos que tendrán su aplicación final en temas como cálculo de esfuerzos. Tambiénse aborda el tema de la fricción, de una forma sencilla, con problemas enfocados al análisis dediversas situaciones para que su comprensión sea simple.Cabe mencionar que todos los temas que comprende esta obra son la base para entender y poderresolver problemas de resistencia de materiales, que es también una parte fundamental en la formación de un ingeniero.La autoraIX
ContenidoUnidad 1 Introducción11.1 ¿Qué es la Estática?21.2 Conceptos fundamentales21.3 Leyes de Newton21.4 Sistemas de unidades21.5 Conversión de unidades31.6 Vectores41.7 Suma de vectores41.8 Componentes rectangulares de un vector en el plano61.9 Componentes rectangulares de un vector en el espacio 121.10 Vectores unitarios131.11 Equilibrio de la partícula15Problemas para resolverProblema retoReferencias bibliográficasReferencias electrónicas18252626Unidad 2 Equilibrio de cuerpos rígidos272.1 Estática del cuerpo rígido282.2 Principio de transmisibilidad282.3 Producto vectorial282.4 Producto escalar312.5 Momento de una fuerza con respecto a un punto342.6 Momento de un par352.7 Sistema equivalente de fuerzas372.8 Equilibrio de un cuerpo rígido en el plano382.9 Equilibrio de un cuerpo rígido en el espacio41Problemas para resolverProblema retoReferencias bibliográficasReferencias electrónicas44515252XI
ContenidoUnidad 3 Vigas, armaduras, marcos y cables3.1 Grados de libertad543.2 Tipos de apoyos y cargas543.3 Clasificación de estructuras553.4 Elementos mecánicos553.5 Convención de signos563.6 Vigas: reacciones, diagramas de cortante y momento563.7 Vigas Gerber713.8 Tipos y características de las armaduras733.9 Marcos simples823.10 Cables con carga concentrada85Problemas para resolverProblema retoReferencias bibliográficasReferencias electrónicasUnidad 4 Centroides, momentos de inerciay fricciónXII53891011011021034.1 Centros de gravedad1044.2 Centroides de áreas1044.3 Momento de inercia de un área1094.4 Momento polar de inercia1114.5 Radio de giro de un área1134.6 Teorema de Steiner o de ejes paralelos1154.7 Producto de inercia1184.8 Módulo de sección1184.9 Leyes de la fricción1254.10 Coeficientes de fricción1264.11 Ángulos de fricción126Problemas para resolverProblemas retoReferencias bibliográficasReferencias electrónicas129135136136
UNIDAD1IntroducciónObjetivosEntender los conceptos de estática, espacio, tiempo, masa y fuerza.Conocer las Leyes de Newton.Reconocer las unidades de los diferentes sistemas de unidades.Entender el concepto de vector como una fuerza.Entender los conceptos de concurrentes, coplanares, resultante y componentes, así comoequilibrio de una partículaConocer la aplicación de las operaciones entre vectores, como suma y resta.Conocer la aplicación de vectores unitarios.Conocer las componentes rectangulares de un vector.Construir diagramas de cuerpo libre.¿Qué sabes?¿Cuál es la diferencia entre masa y fuerza?¿Qué significa 1 N?¿Cómo se convierten unidades de un sistema a otro sistema?¿Cuál es la diferencia entre una cantidad vectorial y una escalar?¿Cuáles son los elementos de un vector?¿Cómo idealizar un problema con vectores y a partir de este construir un diagrama decuerpo libre?¿Cuáles son los tipos de componentes que puede tener un vector y cómo se obtienen?¿Qué es el concepto de resultante de fuerzas?
UNIDAD1Introducción1.1 ¿Qué es la Estática?Hasta la fecha, hay diversas definiciones de Estática, pero todas estas se basan en la Mecánica.La Mecánica es una ciencia que estudia el comportamiento de los cuerpos sometidos a fuerzas, yasea que estos se encuentren en reposo o en movimiento.La Mecánica se divide en tres ramas principales: 1) Mecánica de los cuerpos rígidos; 2) Mecánicade los cuerpos deformables; 3) Mecánica de fluidos.Para su estudio, la Mecánica de los cuerpos rígidos, a su vez, se divide en Estática (estudio de loscuerpos en reposo o que se mueven con una velocidad constante) y Dinámica (estudio de los cuerposen movimiento acelerado).Cuando varias fuerzas actúan sobre un cuerpo, cada una de dichas fuerzas lo desplaza en unadirección y con una intensidad que depende de la fuerza aplicada. Si, a pesar de la aplicación de lasfuerzas, el cuerpo permanece en reposo y no se mueve, se dice que está en estado de equilibrio.Al estudio de las fuerzas aplicadas a cuerpos en estado de equilibrio se le llama Estática.1.2 Conceptos fundamentalesLos conceptos fundamentales que se emplean en la Mecánica son: espacio, tiempo, masa y fuerza.El espacio se refiere a la posición de una partícula en tres dimensiones; el tiempo sirve para medirlos intervalos entre eventos; la masa es una forma cuantitativa de medir la resistencia de un cuerpoa ser acelerado, y la fuerza es la acción sobre un cuerpo, que se caracteriza por tener punto de aplicación, magnitud, dirección y sentido; por lo general, esta última (fuerza) se representa mediante unvector.1.3 Leyes de NewtonLas leyes de Newton se refieren al movimiento de las partículas y son: 1a Ley. Una partícula permanecerá en reposo o se moverá a velocidad constante si la resultantede las fuerzas que actúan sobre ella es cero.2a Ley. Si la resultante de las fuerzas que actúan sobre una partícula es diferente de cero, lapartícula tendrá una aceleración proporcional a la magnitud de la resultante y en el sentido deesta. Se representa mediante la expresión:nnF m a 3a Ley. A toda acción corresponde una reacción de igual magnitud, pero de sentido con trario.1.4 Sistemas de unidadesExisten unidades para medir la longitud, la masa, el tiempo y la fuerza, para eso se utiliza el SistemaInternacional de Unidades (SI) o el Sistema Inglés de Unidades. Sistema Internacional de UnidadesEl Sistema Internacional de Unidades (SI) se usa de manera universal, en este la longitud se mide enmetros (m), la masa en kilogramos (kg), el tiempo en segundos (s) y la fuerza en Newtons (N).Las unidades fundamentales del SI son kg, m y s; la unidad de fuerza es derivada y se obtiene pormedio de la 2a ley donde para acelerar 1 kg 1 m/s2 se necesita aplicar una fuerza de 1 N.F 1 kg (9.807 m/s²) 9.81 N
Grupo Editorial Patria Cuando las cantidades numéricas son demasiado grandes o pequeñas, se pueden usar prefijoscomo los que se listan en la siguiente tabla:Tabla 1.1FormaexponencialPrefijoSímbolo1 000103Kilok1 000 000106MegaM1 000 000 000109GigaG0.00110-3MiliM0.000 00110-6Microµ0.000 000 00110-9NanoNMúltiplosSubmúltiplos1.5 Conversión de unidadesEn ocasiones, para solucionar un problema, es necesario convertir algunas unidades de un sistema aotro, a fin de que exista congruencia; asimismo, también es necesario convertir algunas unidades a suforma básica, para obtener unidades derivadas, como el Newton (N).Tabla b s2/f tSegundossLibraslbLa conversión de unidades en el mismo sistema solo consiste en recorrer el punto decimal treslugares, ya sea a la izquierda o a la derecha.Para las unidades de masa: 1 ton 1 000 kg 1 g 0.001 kg 1 kg 0.001 ton 1 10-3 ton 1 kg 1 000 gPara las unidades de longitud: 1 km 1 000 m 1 103 m 123.4 mm 0.1234 m 1 234 10-4 mPara las unidades de tiempo: 1 h 60 min 3 600 sPara las unidades de fuerza: 1 kN 1 000 N 5 432 N 5.432 kNCuando la conversión de unidades es de un sistema a otro, es necesario utilizar los factores de conversión o equivalencias: 1 f t 12 in 1 in 25.4 mm 2.54 cm
UNIDAD1Introducción 25.4 mm 304.8 mm 30.48 cm 0.3048 m1 f t 12 in 1 in 1 lb 0.4536 kg 453.6 g 1 slug 1 lb 1 lb (0.4536 kg)(9.807 m/s²) 4.448 Ns2ft 1 lbs2ft1.6 VectoresUn vector es una representación gráfica que describe una cantidad física, como el peso de un objeto,la tensión en un cable, el empuje sobre un cuerpo, el desplazamiento, la velocidad, la aceleración, laposición, la fuerza y el momento.Los elementos que conforman un vector son los siguientes: Magnitud. Determina la longitud de la flecha (vector) correspondiente y se representa con unalínea. Muestra un valor numérico asociado con una unidad de medida en kg, N, kg/m, m/s, m/s2o N/m, m, f t, lb, kip.Origen del vector. Punto de inicio.Dirección. Orientación definida por el ángulo que forma el vector con un eje de referencia delsistema cartesiano.Sentido. Se representa con una flecha situada en un extremo de la línea, la cual indica haciadónde se dirige el vector.1.7 Suma de vectoresExisten dos formas de sumar vectores: Gráfica (mediante el método del paralelogramo, por la regla del triángulo y el método delpolígono).Analítica (mediante las componentes rectangulares). Método del paralelogramonnEste método consiste en sumar dos vectoresnA ynB , los cuales se colocan en el mismo origen, al tiempoque se trazan líneas paralelas a los vectores A y B , para que coincidan con los extremos de los mismos,formando así un paralelogramo. Luego, si se traza una nlínea diagonal quenunanal punto origen con laintersección de esas líneas, se encuentra la resultante R de los vectores A B , como se muestra enla figura 1.1.nnnR A BnBnnnA B ROnAFigura 1.1Resultante de dos vectores por el método del paralelogramo.
Grupo Editorial Patria Regla del triánguloLa regla del triángulo consiste ennutilizar, de manera indistinta, solo la nmitad del paralelogramo, ya seael superior o el inferior. El vector B sencoloca donde termina el vectorAy luego se unen mediante unandiagonal,que va desdeel origen de A hasta la punta de flecha de B , con lo que se obtiene la resultantennnR de los vectores A B , como se muestra en la figura 1.2.nBnnnR A BnAnnnAnR A BOnOBFigura 1.2Resultante de dos vectores por la regla del triángulo. Método del polígonoEl método del polígono se utiliza ncuando se tienen más de tres vectores. nEl procedimiento consisnte en colocar el origen del vector B nen el extremo de la flecha del vector A , el origendel vector Cnen el extremo de la flecha del vector B y así sucesivamente; para obtener la resultante R , se une el origen del primer vector con el extremo de la flecha del último vector, como se muestra en la figura 1.3.nnCBnAnnnnR A B COFigura 1.3Suma vectorial de tres vectores por el método del polígono. Componentes rectangularesEste método es una forma analítica de sumar vectores, en la cual es necesario descomponer cada vector en sus componentes rectangulares, mediante la trigonometría o las proporciones.AlertaAlertaRecuerda que las fuerzas coplanares se encuentrancontenidas en el mismo plano (véase figura 1.4).nARecuerda que las fuerzas concurrentes pasanpor el mismo punto (véase figura 1.5).nnBBnOnACFigura 1.4Representación de fuerzas contenidas en el mismo plano(fuerzas coplanares).OnCFigura 1.5Fuerzas concurrentes.
UNIDAD1Introducción1.8 Componentes rectangulares de un vector en el planoAsí como la suma de dos o más vectores origina un vector llamado resultante, mediante el procesoinverso se obtienen las componentes rectangulares de un vector o del vector resultante.Las componentes rectangulares se llaman así porque son perpendiculares entre sí y forman unángulo recto.Si se utiliza un marco de referencia, como el plano cartesiano xy, las componentes rectangularesse pueden representar por medio el uso de la trigonometría como la proyección del vector sobre losejes x y y (véase figura 1.6).ynFnFyθxnOFxFigura 1.6Proyección de una fuerza (componentes rectangulares de un vector).nnnLas componentes rectangulares de F son F x y F y, y se obtienen de la siguiente forma:nnnnF x F cos θ F y F sen θnA las cantidades escalares Fx y Fy se les llama componentes escalares de F , de modo que los vectores tienen componentes vectoriales y componentes escalares.AlertaAlertaRecuerda que la Ley de los senos es:Asen a Bsen b Recuerda que la Ley de los cosenos es:Csen cY se representa de la siguiente forma:cBaFigura 1.7Ley de senos y cosenos. ACbA 2 B 2 C 2 - 2BC cos aA B 2 C 2 - 2 BC cos aB 2 A 2 C 2 - 2AC cos bB A 2 C 2 - 2 AC cos bC 2 A 2 B 2 - 2AB cos cC A 2 B 2 - 2 AB cos c
Grupo Editorial Patria Problema resueltonnDos fuerzas A y B actúan sobre un tornillo, como se muestranen la figura 1.8. Calcular la magnitud de la resultante R y sudirección, por la regla del triángulo.nB 75 N35 nA 45 N25 Figura 1.8Fuerzas sobre un tornillo.SoluciónnPrimero,se dibuja el vector A y en su extremofinal el vecnntor B; a continuación,elorigendelvectorAseune con elnfinal del vectorB mediante una diagonal (que representanla resultante R ), como se muestra en la figura 1.9.Luego, se calculan los ángulos interiores del triángulo,donde:nBnRC 180 - 35 145 CEn seguida, mediante la Ley de los cosenos y la Ley delos senos se calcula el valor de la resultante y los ángulosfaltantes, así:φnAR 2 A2 B2 - 2AB cos c 452 752 - (2)(45)(75) cos 145 13 179.2763Figura 1.9Resultante de dos vectores.R 13 179.2763 114.8010 NLa comprobación de la solución se puede realizar pormedio de la Ley de los senos:Asen a Bsen b45 sen 145 114.801075 sen 145 114.8010 C45sen csen a sen a sen b 75sen b a114.8010sen 145 a sen-1 0.2248 12.99 13 b sen-1 0.3747 22.00 22 35 145 cAPara determinar la dirección de la resultante, sendebesumar el ángulo al cual se encuentra el vector A (quees de 25 ) más el ángulo interior b. De la figura 1.10,se tiene que:BRbφ25 Figura 1.10Suma vectorial del problema resuelto.φ 25 b 25 22 47
UNIDAD1IntroducciónProblema resueltoyAhora, se pide que se resuelva el mismo problema por el método de las componentes rectangulares. Para ello, primero sedebe descomponer cada vector, obteniendo su componenteen dirección x y y (véase figura 1.11).nB 75 NTabla 1.3VectornAnB35 Magnitud(N)ComponentexComponentey4545 cos 25 40.783845 sen 25 19.01787575 cos 60 37.500075 sen 60 64.9519 Fx 78.2838 N Fy 83.9697 NnA 45 N25 xFigura 1.11Fuerzas en el tornillo.SoluciónPara obtener el valor de la resultante, primero se aplica el teorema de Pitágoras, con el que se obtiene:R 2 Fx2 Fy2 (78.2838)2 (83.9697)2 13 179.2639R 13 179.2639 114.8010 NPara obtener la dirección de la resultante, se utiliza la siguiente función trigonométrica:tan φ FyFx 83.969778.2838φ tan-1 1.0726 47 Problema resueltoVarias fuerzas actúan de manera simultánea sobre una armella, como se muestra en la figura 1.12.Calcular la magnitud de la resultante y la dirección en la que actúa.yF1 175 NF2 65 Nx18 36 F3 125 NFigura 1.12Fuerzas en la armella. 25 F4 95 N
Grupo Editorial Patria SoluciónnF1El método más recomendable para resolver este problemaes mediante componentes rectangulares, ya que se trata decuatro fuerzas que actúan simultáneamente. La figura 1.13muestra las componentes rectangulares de cada vector.nF2 sen 18 nF2 cos 18 nF4 sen 25 nF3 cos 36 nF3 sen 36 Figura 1.13nF4 cos 25 Descomposición de las fuerzas en la armella.Primero, se procede a calcular las componentes de cada vector fuerza:Tabla 1.4VectornF1nMagnitud(N)Componentex ( )Componentex (–)Componentey ( )65 sen 18 20.0861175175F26565 cos 18 61.8187F3125125 cos 36 101.1271F495nnComponentey (–)125 sen 36 73.473295 cos 25 86.099295 sen 25 40.1487 40.1487 N 162.9458 N 195.0861 N 159.5724 N Fx( ) Fx(-) Fy( ) Fy(-) Fx 40.1487 - 162.9458 -122.7971 N Fy 195.0861 - 159.5724 35.5137 NR2 Fx2 Fy2 (-122.7971)2 (35.5137)2 16 340.3507R 16 340.3507 127.8294 NLa dirección de la resultante está dada por:tan φ FyFx 35.5137122.7971φ tan-1 0.2892 16.13 yR 127.8294 N35.5137xφ 16.13 122.7971Figura 1.14
UNIDAD1IntroducciónProblema resueltoAlertaDos cables de acero sostienen un equipo que será colocado sobre una lancha o balsa; el peso delequipo es de 875 kg. Determinar la fuerza de tensión que se presenta en cada cable, si el equipo seencuentra en la posición que se muestra en la figura 1.16.Recuerda que un diagramade cuerpo libre es undibujo simplificado querepresenta a la partícula ya las fuerzas que actúan enesta (véase figura 1.15).BAF2F165 F3F4O40 Figura 1.15Diagrama de cuerpo libre.Figura 1.16SoluciónPrimero, hay que convertir el peso del equipo a una fuerza atraída por la gravedad, con la cual se obtiene:F mgDonde g es la aceleración debida a la gravedad:g 9.81ms2 nm F 875 kg 9.81 8 583.75 Ns2 Luego, se dibuja un diagrama de cuerpo libre (véase figura 1.17), donde se representen las fuerzas queactúan simultáneamente en el punto O.nAnnAAnB65 O40 25 nnFF65 50 8 583.75 Nn40 Bn50 105 B40 Figura 1.17En seguida, se calculan los ángulos interiores del triángulo mediante geometría, sumas y restas.10
Grupo Editorial Patria Por último, a través de la Ley de los senos se obtiene finalmente la fuerza de tensión que se presentaen los cables A y B:Asen a Bsen b FAsen csen 50 8 583.75 sen 50 sen 105 8 583.75 sen 25 sen 105 Bsen 25 AA 6 807.4937 N BB 3 755.6191 N 8 583.75sen 105 Problema resueltoUn perfil de acero es levantado por una grúa,mediante dos cables A y B, como se muestraen la figura 1.18. Determinar la magnitud y dirección de la fuerza resultante R.yA 25 N8.174B 30 N543xFigura 1.18SoluciónPara resolver este problema, primero se calculan las componentes de cada vector de la siguiente forma: 4 12.3457 N 8.1 en dirección -x 7 21.6049 N 8.1 en dirección yAx 25 Ay 25 3 4 Bx 30 By 30 18.00 N5 24.00 N5 en dirección xen dirección yTabla 1.5VectornAnBMagnitud(N)Componentex ( )2530Componentex (–)Componentey ( )12.345721.604918.0000Componentey (–)24.0000 18.0000 N 12.3457 N 45.6049 N Fx( ) Fx(-) Fy( ) Fy(-)11
UNIDAD1Introducción Fx 18.00 - 12.3457 5.6543 N Fy 45.6049 45.6049 NR2 Fx2 Fy2 (5.6543)2 (45.6049)2 2111.7780R 2 111.7780 45.9541 NLa dirección de la resultante está dada por:tan φ FyFx 45.60495.6543φ tan-1 8.0655 82.93 yn R 45.9541 N45.6049 N ˆjφ 82.93 x5.6543 N ˆiFigura 1.191.9 Componentes rectangulares de un vector en el espacioPara el espacio, se tiene que las componentes de un vector son:nnnnF F xi F yj F zknDichas componentes se obtienen proyectando el vector F sobre los ejes x, y y z, mediante losángulos φx, φy y φz, que el vector forma con cada uno de los ejes. La componente en cada dirección seobtiene como sigue:nnnnnnF xi F cos φx F yj F cos φy F zk F cos φzA los cosenos de φx, φy y φz se les conoce como cosenos directores:cos φx, cos φy, cos φznLa figura 1.20 representa las componentes rectangulares de un vector F en el espacio, donde Fymuestra la proyección vertical sobre el eje y, y Fh muestra la proyección sobre un plano horizontal xz.El vector Fh se proyecta nuevamente sobre los ejes x y z, obteniendo las componentes Fx y Fz.yyyFyFyθyOθyFOFOFzxxφzFigura 1.2012FhFhzFxφzx
Grupo Editorial Patria nnnPor su parte, la figura 1.21 muestra la obtención de los vectores F x, F y y F z, a partir de sus gura 1.211.10 Vectores unitariosUn vector unitario es aquel que posee las mismas propiedades que su vector original, pero su magnitud es la unidad,por lo que su dirección y sentido permanecen iguales. En la figura 1.22 se muestranel vector F , con una magnitud de 5 N, y su vector unitario f̂, con una magnitud de1nN. Laforma dennobtener dicho vector es dividiendo cada una de sus componentes rectangulares F xi, F yj y F zk, entre elmódulo o la magnitud del vector, que se encuentra dado por:nnnnF F xi F yj F zkcomponentes del vector F.n F Fx2 Fy2 Fz2nf̂ F xin F f̂ F F xj F nF ximódulo del vector F para el espacio. f̂ xi f̂ yjn F xj F componentes del vector unitario f en el plano.n F zk F f̂ xi f̂ yj f̂ zkcomponentes del vector unitario f en el espacio.yf 1NF 5NxzFigura 1.2213
UNIDAD1IntroducciónProblema resueltoUna grúa sostiene una estructura metálica, como se muestra en la figura 1.23, hasta que el cable AP setensa con una fuerza de 3.45 kN.yPnAP20 m40 mA15 mOxzFigura 1.23Determinar:na) Las componentes Fx , F y y Fz del vector AP .nb) Los ángulos θx , θy y θz, que forman el vector AP con los ejes x y z.Solucióna)Primero, se calcula el vector distancia del punto A al punto P:nAP dxiˆ dy jˆ dzk̂ -20 m iˆ 40 m jˆ 15 m k̂nLuego, se calcula el módulo de AP como:n AP dx 2i dy 2j dz 2k (-20)2 (40)2 (15)2 2 225 47.17nDespués, se obtiene el vector unitario de AP de la siguiente manera:nU AP dxn AP iˆ dyn AP jˆ dzn AP k̂ -20 m47.17iˆ 40 m47.17jˆ 15 m47.17k̂nU AP 0.4240 iˆ 0.8480 jˆ 0.3180 k̂Por último, la fuerza de 3.45 kN se convierte en un vector fuerza, utilizando las propiedades del vectorunitario (dirección y sentido), las cuales son las mismas que el vector distancia.nF AP F (UAP x iˆ UAP y jˆ UAP z k̂ ) (3.45 kN)(0.4240 iˆ 0.8480 jˆ 0.3180 k̂ )nF AP FAP x iˆ FAP y jˆ FAP z k̂ 1.4628 kN iˆ 2.9256 kN jˆ 1.0971 kN k̂FAP x iˆ -1 462.8 N iˆ FAP y jˆ 2 925.6 N jˆ FAP z k̂ 1.0971 N k̂14
Grupo Editorial Patria b)Para calcular los ángulos directores, se utiliza la siguiente expresión: FAP x i -1 462.8 cos-1 cos-1 (-0.424) 115.1 FAP 3 450 qx cos-1 FAP y j 2 925.6 cos-1 cos-1 (0.848) 32.01 FAP 3 450 qy cos-1 FAP z k 1 097.1 cos-1 cos-1 (0.318) 71.16 FAP 3 450 qz cos-1 1.11 Equilibrio de la partículaSe dice que una partícula se encuentra en equilibrio si la resultante delas fuerzas que actúan sobre esta es cero; es decir, se contrarrestan,como se muestra en la figura 1.24. Las ecuaciones que definen elequilibrio de la partícula son:R Fi 0FaFa Fb 0 Fx 0 Fy 0FbFigura 1.24Problema resueltoDeterminar si la partícula P de la figura 1.25 seencuentra en equilibrio.yF1 40 N30 F4 30 NF2 20 N30 xF3 17.32 NFigura 1.25SoluciónPrimero, se calculan las componentes de cada vector en dirección x y y, a fin de formular las ecuacionesde equilibrio de la siguiente manera: Fx 0-Fx - Fx Fx 0-40 sen 30 - 20 sen 30 30 0 Fx 0-20 - 10 30 0-30 30 0 Fy 0Fy - Fy - Fy 040 cos 30 - 20 cos 30 - 17.32 0 Fy 04.641 - 17.321 - 17.32 034.641 - 34.641 01122430 00 0De lo anterior, se puede concluir que la partícula P se encuentra en equilibrio.15
UNIDAD1IntroducciónProblema resueltoDeterminar la fuerza de tensión Py con la cual una grúa jala a la torre en el punto P, si dicha torre estáanclada por tres cables: A, B y C, y la tensión en el cable AP es de Fa 1.350 kips, como se aprecia enla figura 1.26.yP70 ft10 ft10 ftACO20 ftzB45 ft10 ft15 ftxFigura 1.26SoluciónPrimero, se calculan los vectores distancia del punto P a los puntos A, B y C:nAP dxiˆ dy jˆ dzk̂ 20 f t iˆ 70 f t jˆ - 10 f t k̂nBP dxiˆ dy jˆ dzk̂ -45 f t iˆ 70 f t jˆ - 10 f t k̂nCP dxiˆ dy jˆ dzk̂ -10 f t iˆ 70 f t jˆ - 15 f t k̂nnnLuego, se calculan los módulos de AP , BP y CP como:n AP dx 2 dy 2 dz 2 (20)2 (70)2 (-10)2 5 400 73.4847n BP dx 2 dy 2 dz 2 (-45)2 (70)2 (-10)2 7 025 83.8153n CP dx 2 dy 2 dz 2 (-10)2 (70)2 (15)2 5 225 72.2842Aún faltan las unidades (f t ).nnnDespués, calculamos los vectores unitarios de AP , BP y CP de la siguiente manera:nU AP dxiˆn AP dy jˆn AP dz k̂n AP 20 f t73.4847iˆ 70 f t73.4847jˆ -10 f t73.4847k̂nU AP 0.2722 iˆ 0.9526 jˆ - 0.1361 k̂nU BP ndxiˆn BP dy jˆn BP dz k̂n BP -45 f t83.8153U BP -0.5369 iˆ 0.8352 jˆ - 0.1193 k̂16iˆ 70 f t83.8153jˆ -10 f t83.8153k̂
Grupo Editorial Patria nU CP dxiˆn CP dy jˆn CP dz k̂n CP -10 f t72.2842iˆ 70 f t72.2842jˆ 15 f t72.2842k̂nU CP -0.1383 iˆ 0.9684 jˆ - 0.2075 k̂Por último, los vectores unitarios (distancia) se convierten en vectores fuerza y se plantean las ecuacionesde equilibrio, considerando que la fuerza de tensión que ejerce la grúa hacia arriba se denomina Py jˆ:nF AP Fa (UAP x iˆ UAP y jˆ UAP z k̂ ) (Fa)(0.2722 iˆ 0.9526 jˆ - 0.1361 k̂ )nF AP (1.350 kips)(0.2722 iˆ 0.9526 jˆ - 0.1361 k̂ )nF AP (0.3675 iˆ 1.2860 jˆ - 0.1837 k̂ )nF BP Fb (UBP x iˆ UBP y jˆ UBP z k̂ ) (Fb)(-0.5369 iˆ 0.8352 jˆ - 0.1193 k̂ )nF BP (-0.5369Fb iˆ 0.8352Fb jˆ - 0.1193Fb k̂ )nF CP Fc (UCP x iˆ UCP y jˆ UCP z k̂ ) (Fc)(-0.1383 iˆ 0.9684 jˆ 0.2075 k̂ )nF CP (-1.1383Fc iˆ 0.9684Fc jˆ 0.2075Fb k̂ ) Fx i 00.3675 iˆ - 0.5369Fb iˆ - 0.1383Fc iˆ 0(1) Fy j 01.2860 jˆ 0.8352Fb jˆ 0.9684Fc jˆ Py jˆ 0(2) Fz k 0-0.1837 k̂ - 0.1193Fb k̂ 0.2075Fc k̂ 0(3)El sistema de tres ecuaciones se resuelve con tres incógnitas:0.3675 0.5369 Fb 0.1383 FcLuego, se despeja Fc de la ecuación 1:Fc 0.36750.13830.5369 Fb-0.1383 2.6573 - 3.8821 Fb 0.1837 0.1193 Fb (0.2075)(2.6573 3.8821 Fb) 0Después, se sustituye el valor de Fc en la ecuación 3, para obtener Fb: 0.1837 0.1193 Fb 0.5514 0.8055 Fb 00.3677 0.9251 Fb 00.3677 0.9251 FbFb 0.36770.9251 0.3974 kipsFc 2.6573 3.8821(0.3974) 1.1146 kips1.2860 0.8352(0.3974) 0.9684(1.1146) PyFinalmente, con el valor de Fc y Fb, se obtiene el valor de Py de la ecuación 2.1.2860 0.3319 1.0794 PyPy jˆ 2.6873 kips17
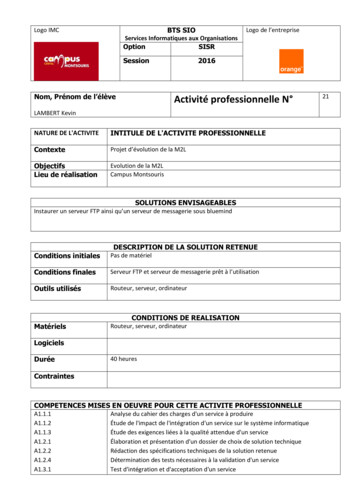
UNIDAD1Problemas para resolver1.1 Para que un barco atraque se utilizan tres cables, comose muestra en la figura 1.27. Calcular:1.4 En la pared de una casa se coloca una argolla que sujetatres cables, como se aprecia en la figura 1.30. Calcular:a) Las componentes x y y de cada uno de cables.a) Las componentes x y y de cada uno de cables.b) La magnitud de la resultante.b) La magnitud de la resultante.c) La dirección de la resultante.c) La dirección de la resultante.y125 lby180 lb40 763 lb90 lb25 20 639 lb50 30 xx15 Figura 1.271.2 Para que un barco atraque en un puerto se utilizan trescables, como se muestra en la figura 1.28. Calcular:1 154 lbFigura 1.30a) Las componentes x y y de cada uno de cables.1.5 Una armella está sujeta a una losa, como muestra la figura1.31, mientras tres cables están amarrados a esta. Calcular:b) La magnitud de la resultante.a) Las componentes x y y de cada uno de cables.c) La dirección de la resultante.b) La magnitud de la resultante.y1.42 kNc) La dirección de la resultante.1.36 kNy875 N30 60 N45 25 45 xx50 N65 Figura 1.281.3 En el techo de un taller se coloca una argolla de la cualcuelgan tres cables, como se muestra en la figura 1.29.Calcu lar:a) Las componentes x y y de cada uno de cables.20 Figura 1.3175 N1.6 La armella que se representa en la figura 1.32 está sujeta a la acción de tres fuerzas. Calcular:a) Las componentes x y y de cada uno de los cables.b) La magnitud de la resultante.b) La magnitud de la resultante.c) La dirección de la resultante.c) La dirección de la resultante.yy125 lb18 43 482 NFigura 1.291826 38 xx95 lb2 356 N205 lb 17 1 274 NFigura 1.32Problemas aplicados a la realidadProblemas
Para las unidades de longitud: 1 km 1000 m 1 103 m 123.4 mm 0.1234 m 1 234 10-4 m Para las unidades de tiempo: 1 h 60 min 3600 s Para las unidades de fuerza: 1 kN 1000 N 5432 N 5.432 kN Cuando la conversión de unidades es de un sistema a otro, es necesario utilizar los factores de conver-sión o equivalencias: 1 ft 12 in