Transcription
Taller de RobóticaIntroducción a la Robótica. Historia,definiciones, tipos, partes yaplicaciones de robots.Profesor. Ing. Alleiny Machado Sosa. MSc.
Taller de Robótica Historia y Orígenes. Tipos de Robots. Partes de Robots. Aplicaciones.
Taller de Robótica Historia y Orígenes.El término robot se popularizó con el éxito de laobra R.U.R. (Robots Universales Rossum), escritapor Karel Čapek en 1920. En la traducción alinglés de dicha obra, la palabra checa robota,que significa trabajos forzados, fue traducida alinglés como robot. (wikipedia)
Taller de Robótica Historia y Orígenes.La historia de la robótica va unida a laconstrucción de "artefactos", que trataban dematerializar el deseo humano de crear seres asu semejanza y que lo descargasen del trabajo
Taller de RobóticaSiglo I a. C. y antes:Descripciones de más de 100 máquinas y autómatas,incluyendo un artefacto con fuego, un órgano de viento,una máquina operada mediante una moneda, unamáquina de vapor, en Neumática y Autómata de Herón deAlejandría.1495.Leonardo da Vinci diseña un robo humanoide al cual llama«Caballero mecánico».
Taller de Robótica1738.Jacques de Vaucanson construye un pato mecánico capazde comer, agitar sus alas y excretar al cual llamóDigesting Duck.1800s.Aparecen juegetes mecánicos japoneses que sirven te,disparan flechas y pintan.1921.Aparece el primer autómata de ficción llamado «robot».
Taller de Robótica1930s.Se exhibe un robot humanoide en la Exposición Universal.1942.Aparecen las «Tres leyes de la robótica» en una revista deciencia ficción llamada «Circulo Vicioso»1948.Exhiben un robot con comportamiento biológico simple.1956.Primer robot comercial«Unimation».deuna compañíallamada
Taller de Robótica1961.Se instala el primer robot industrial.1963.Primer robot palletizing.1973.Primer robot con 6 ejes electromecánicos. 6DOF.1975.Brazo manipulador programable universal. (PUMA).2000.ASIMO. Robot japonés humanoide que camina de formabípeda e interactúa con las personas.
Taller de Robótica Tipos de robots.Según su Cronología se clasifican de 1ra a 4tageneración.- Primera generación.Manipuladores. Son sistemas mecánicos multifuncionalescon un sencillo sistema de control, bien manual, desecuencia fija o de secuencia variable.
Taller de Robótica- Segunda generación.Robots de aprendizaje. Repiten una secuencia demovimientos que ha sido ejecutada previamente por unoperador humano. El modo de hacerlo es a través de undispositivo mecánico. El operador realiza losmovimientos requeridos mientras el robot le sigue y losmemoriza.
Taller de Robótica- Tercera generación.Robots con control sensorizado. El controlador es unacomputadora que ejecuta las órdenes de un programa ylas envía al manipulador para que realice losmovimientos necesarios.
Taller de Robótica- Cuarta generación.Robots inteligentes. Son similares a los anteriores, peroademás poseen sensores que envían información a lacomputadora de control sobre el estado del proceso.Esto permite una toma inteligente de decisiones y elcontrol del proceso en tiempo real.
Taller de RobóticaEn cuanto a su estructura.Los robots son muy diversos y esto hacedifícilestablecer una clasificación coherente de los mismos. Lasubdivisión de los robots con base en su arquitectura sehace en los siguientes s.Zoomórficos.Híbridos.
Taller de Robótica1. Poliarticulados.Robots de muy diversa forma y configuración y donde seencuentran los manipuladores, los Robots industriales,los Robots cartesianos y se emplean cuando es precisoabarcar una zona de trabajo relativamente amplia oalargada, actuar sobre objetos de alguna manera.Existen dos subcategorías de robot poliarticulados.1. Robots Paralelos.2. Robots Series
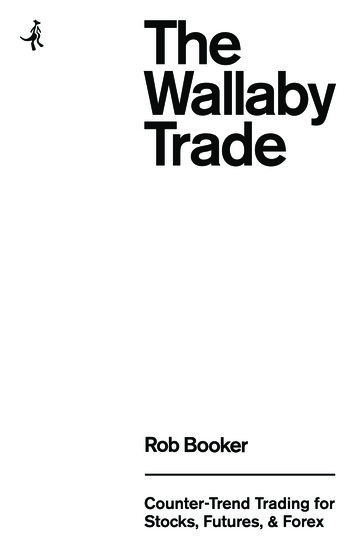
Taller de Robótica1. Robots Paralelos.Sus articulaciones están en paralelo.StewardDelta
Taller de Robótica1. Robots Serie.Sus articulaciones están unaa continuación de la otra.
Taller de RobóticaTipos de articulaciones
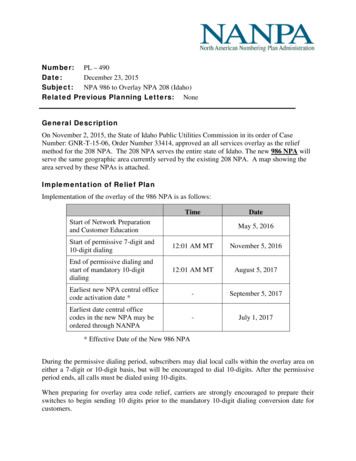
Taller de Robótica2. Robots Móviles.Son Robots con gran capacidad de desplazamiento dotadosde sistemas de locomoción. Estos pueden ser:1.2.3.4.Sub acuáticos.Terrestres.Aéreos.Espaciales.
Taller de RobóticaSub AcuáticoAéreosTerrestreEspaciales
Taller de Robótica3. Androides.Son Robots que intentan reproducir total o parcialmentela forma y el comportamiento cinemático del serhumano. Actualmente, los androides son todavíadispositivos muy poco evolucionados y sin utilidadpráctica, y destinados, fundamentalmente, al estudio yexperimentación.
Taller de RobóticaRobotASIMORobotP3
Taller de Robótica4. ZoomórficosLos Robots zoomórficos, que considerados en sentido norestrictivo podrían incluir también a los androides,constituyen una clase caracterizada principalmente porsus sistemas de locomoción que imitan a los diversosseres vivos. Se catalogan en caminadores y nocaminadores.
Taller de RobóticaArácnidoSerpiente
Taller de Robótica5. HíbridosCorresponden a aquellos de difícil clasificación, cuyaestructura se sitúa en combinación con alguna de lasanteriores ya expuestas, bien sea por conjunción o poryuxtaposición. Por ejemplo, un dispositivo segmentadoarticulado y con ruedas, es al mismo tiempo, uno de losatributos de los Robots móviles y de los Robotszoomórficos.
Taller de RobóticaHíbrido
Taller de RobóticaPartes Fundamentales de un Robot.Como se pudo apreciar hasta ahora existe una grandiversidad de tipos de robot sin embargo todos presentan lasmismas partes o elementos fundamentales para sufuncionamiento. Estos elementos son:1.2.3.4.5.Estructura: Esqueleto o chasis con mecanismos.Actuadores.Sensores.Sistema de control.Fuentes de energía.
Taller de RobóticaActuadores.Los actuadores son los dispositivos que le dan movimientoal robot. Existen tres tipos básicos de actuadores.1. Eléctricos.- Motores DC, AC.- Servo motores.- Alambres musculares.2. Neumáticos.- Cilindros y Músculos.3. Hidráulicos.- Cilindros.
Taller de RobóticaMotores eléctricos.Los motores eléctricos mas comúnmente utilizadosen robótica son los de corriente directa (DC) conimán permanente porque son mas compactos,económicos, robustos fáciles de controlar.En los últimos tiempos también se están utilizandocon mucha frecuencia los motores de corrientealterna (AC) debido a que el desarrollo tecnológicoa permitido la aparición de controladoreseficientes para este tipo de motores que presentaventajas con respecto a los DC.
Taller de RobóticaDC pequeñosServoPaPDC de PotenciaAC de potencia
Taller de RobóticaVariación de Velocidad de motores eléctricos.Motores DC.- Variación de voltaje de armadura.- PWM. Modulación de Ancho de Pulso.Motores AC.- Variación de frecuencia y amplitud.(Variadores de frecuencia)En los Servomotores se actúa directamente sobrela posición angular del eje. (tiene un lazo internode control de posición)
Taller de RobóticaActuadores Neumáticos.-Es una tecnología barata y de fácil mantenimiento.-Necesitan aire comprimido, son difíciles de controlar ygeneralmente se utilizan en robots paralelos.-Necesitan además interfaces electro-neumáticas llamadaselectro-válvulas.Actuadores Hidráulicos.-Son alimentados con fluido a presión.Producen elevadas fuerzas.Son mas fáciles de controlar.Relativamente Baratos.
Taller de RobóticaHidráulicosNeumáticosElectroválvula
Taller de RobóticaSensores.Los sensores son dispositivos que convierten magnitudesfísicas en valores eléctricos proporcionales y medibles dedicha magnitud. En un robot es necesario conocer tanto elpropio estado del robot como del estado de su entorno.Sensores internos: sensores integrados en la propiaestructura mecánica del robot, que dan información delestado de las articulaciones del robot y son los encargadosdel control articular del mismo. Estos son:- Posición. (Encoders, Sincros y Resolvers)- Velocidad. (Taco generadores)- Aceleración.
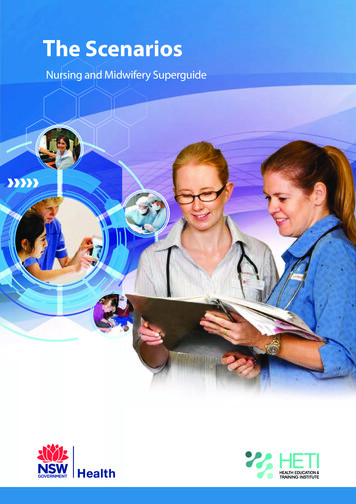
Taller de RobóticaSensores externos: dan información del entorno del roboty se utilizan para guiado, navegación, identificación ymanipulación de objetos etc.-Visión (cámaras CCD).Proximidad (PIR y Ultrasónicos).Fuerza (Galgas extensiométricas).Posición (GPS).Movimiento (IMU)Orientación (magnetómetros).Altitud (Barómetros).Temperatura (Termómetros).
Taller de RobóticaUltrasónicoPIRGPSCámaraGalga ExtIMUSensor de TempMagnetómetroSensores comúnmente usados en robóticaBarómetro
Taller de RobóticaSistemas de Control.El sistema de control del robot es el hardware y softwareinteractúa con sensores y actuadores. Este es el encargadodel control de movimiento y la comunicación con sistemassuperiores de navegación, generación de trayectorias,inteligencia artificial etc.El sistema de control es entonces quien, lee el valor de lossensores, ejecuta los algoritmos matemáticos degeneración de mando y da una salida a los actuadores paracorregir el error de posición de las articulaciones.
Taller de RobóticaLos sistemas de control para robótica siempre son sistemasbasados en microprocesadores, dispositivos lógicosprogramables (CPLDs o FPGAs) o una combinación deambos.Salidas. (a los Actuadores)- Analógicas.- Digitales.- PWM.Entradas. (de los Sensores)- Analógicas.- Digitales.- Paralelo.- Serie.- USB.- RS-232- SPI- I2C- CAN- LIN
Taller de Robótica
Taller de RobóticaAplicaciones.Orientación de la evaluación final.El trabajo final consistirá en un trabajo de investigación porequipos y con varios temas.Los trabajos deberán presentarse con una introducción,desarrollo, conclusiones y bibliografía. Con la caratuladeterminada por universidad y ser ingresados al Atrium enla opción de tareas.
Taller de RobóticaTemas de investigación para la tarea final1. La robótica en la industria, marcas comerciales,características y herramientas.2. Robots móviles y sus aplicaciones específicas.3. Robots Humanoides, ¿en qué nivel están?.4. La robótica y la medicina moderna.5. La robótica y el transporte.6. La robótica en el armamento moderno.7. La robótica y el entretenimiento.
Taller de Robótica Partes Fundamentales de un Robot. Como se pudo apreciar hasta ahora existe una gran diversidad de tipos de robot sin embargo todos presentan las mismas partes o elementos fundamentales para su funcionamiento. Estos elementos son: 1. Estructura: Esqueleto o chasis con mecanismos. 2. Actuadores. 3. Sensores. 4.