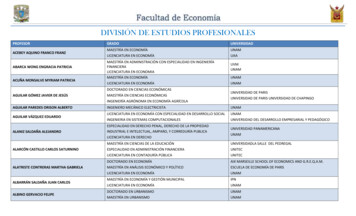
Transcription
CAPITULO cincoControl De Sistema LinealesEl objetivo de este capitulo es demostrar la metodología del control de modosdeslizantes para sistemas lineales. Reduciendo el sistema de ecuaciones de una formaregular, el cual es un paso preliminar en cualquier procedimiento de diseño, el núcleo dela idea es usar los métodos de la teoría de control para reducir el orden de lasecuaciones empleando diferentes métodos para implementar los modos deslizantes conla dinámica deseada5.1 lugarde eigenvaloresCuando comenzamos con los convencionales problemas de la teoría de control lineal: ellugar de los eigenvalores en un sistema lineal multidimensional invariante en el tiempox& Ax Bu(5.1.1)Donde x y u son vectores de estado y control de dimensión n y m, respectivamente, A y Bson matrices constantes, donde el Rango(B) m, se asume que el sistema puede sercontrolable.Para cualquier sistema controlable existe una retroalimentación lineal u Fx(F existe comouna matriz constante) tal que los eigenvalores del sistema del sistema retroalimentado,ej. Matriz A BF, toma los valores deseados y da como resultado, las propiedadesdinámicas deseadas del sistema. (Kwakernaak y Sivan, 1972)Nótese que los eigenvalores pueden ser resueltos ajustándose al control de modosdeslizantes tratándose como un sistema de orden reducido. Como demostración en lasección 3.3 el sistema llega a ser simple para sistemas de forma regular. Dado que elrango(B) m, de la matriz B en (5.11) puede ser separada (luego ordenando lascomponentes de los vectores de estado) B B 1 B2 (5.1.2)donde B1 ℜ(n-m)xn , B2 ℜ-mxm con det B2 0 la transformación coordinada no singular x1 x Tx 2 I n m B1 B2 1 T 10 B2 reduciendo el sistema de ecuaciones (5.1.1) y (5.1.2) a la forma regular:(5.1.3)
x&1 A11x1 A12 x 2x& 2 A21 x1 A22 x 2 u(5.1.4)Donde x 1 ℜ(n-m) , x 2 ℜ-m y Aij son matrices constantes para i, j 1,2.La controlabilidad de (A, B) para el par (A11, A22) también es controlable (Utkin y Young,1978) manejaron x 2 como control intermediario de m-dimensión del primer subsistemacontrolable de (n-m)-dimensión (5.4), todos (n-m)-eigenvalores pueden ser asignadosarbitrariamente para una propia selección de la matriz C enx2 -Cx1para proveer la dependencia deseada entre las componentes x 1 y x 2 del vector de estado,el modo deslizante puede ser implementado en la variables x 2 Cx1 0(5.1.5)Donde s T (s1.,s m) es la diferencia entre los valores deseados y los reales de x 2,después del empezar el modo deslizante, el movimiento es gobernado por un sistema deorden reducido con los eigenvalores deseados.x&1 ( A11 x1 A12C ) x1(5.1.6)Para una parte de control discontinuo lineal.u (α x δ ) sign ( s)(α y δ constantes positivas)(5.1.7)Con, sin g ( s)T [sin g ( s1 ).sin g (s m )] Calcular la derivada respecto al tiempo de V& 12 s T sV& s T ((CA11 A21 ) x1 (CA12 A22 ) x 2 ) (α x δ ) s s ( CA11 A21 ) x1 ( CA12 A22 ) x 2 ) (α x δ ) sEs evidente que existe un α tal que, para cualquier δ, la derivada respecto al tiempo V& esnegativa; Esto valida la convergencia del vector de estado para la variable s 0 en (5.1.5) yla existencia del modo deslizante con la dinámica deseada, el intervalo de tiempo antesdel cambio deslizable puede ser incrementado o decrementado con los parámetros a y ddel control (5.1.7).Un resultado similar puede ser obtenido en el sistema con la siguiente unidad de control(sección 3.5):u (α x δ )sss (s T s )12(5.1.8)El cuál experimenta discontinuidades en la variable s 0 en contraste al control (5.1.7) conpuntos de discontinuidad en cada superficie s i 0 (i 1,.,m). La derivada respecto altiempo de v para el sistema (5.1.4)con el control (5.1.8) es de la forma
V& s T (( CA11 A21 ) x1 (CA12 A22 ) x 2 ) (α x δ ) s s (CA11 A21 ) x1 ( CA12 A22 ) x 2 ) (α x δ ) sDe nuevo, para un α tal que V& es negativa para cualquier δ y para alcanzar el estado dela variable s 0 después de un intervalo de tiempo finito.Si el sistema no es reducido a la forma regular, el múltiplo s Cx (C existe como unamatriz m x (n-m)que pueden ser seleccionados en términos del sistema original (5.1.1)basado en la aproximación de un método de control equivalente y las condiciones para laexistencia de un modo deslizante (sección 2.3 y 2.4) asumiendo el modo deslizante ens 0 que tiene las propiedades dinámicas deseadas y la matriz CB no es singular,entoncess& CAx CBuY la derivada respecto al tiempo de la función de Lyapunov V 1 2 s T es de la formaV& s T CAx s T CBuSi la matriz (CB (CB) T ) es definida positiva, entonces el control es discontinuo.u M ( x) sign ( s )con M ( x) (α x δ ) y con a lo suficientemente alta pero finita y un valor arbitrario de dllevan al modo deslizante después de un intervalo de tiempo finito (la demostración essimilar a uno de los sistemas no lineales de la sección 3.5)para una matriz arbitraria CB , el control puede ser seleccionado en conformidad con elmétodo de la sección 3.2:u U ( x) sign ( s * )s * ( CB) T sla derivada respecto al tiempo de la función de Lyapunov elegida V 1 2 s T para el sistemacon U ( x) (α x δ ) ,V& ( s* )T (CB) 1 CAx s* (α x δ ) s* (CB) 1CAx s* (α x δ )Si es definida negativa para una a la suficientemente alta y una d arbitraria, esta bien.Finalmente, es interesante notar que con unidades de control no lineal, la existencia de unacondición de un modo deslizante, puede ser alcanzado por medio de criterios deestabilidad algebraicos implementados para sistemas lineales, ciertamente, si CB es unamatriz de Hurwitz entonces la ecuación de Lyapunov (CB) P P T (CB) I m tiene una
solución definida positiva P 0, y la derivada respecto al tiempo de la función de Lyapunovseleccionada V 1 2 s T P 0, en el sistema con control u M ( x) s spuede serencontrado comosV& sT PAx M ( x ) sT P (CA)s s T PAx M ( x ) s T s PAxP(CB) (CB) T P s2s1M ( x) s2Si la función M ( x) (α x δ ) entonces V& es negativa y el modo deslizante ocurredespués de un intervalo de tiempo finito (sección 3.5).5.2 sistemasinvariantesUno de los muchos objetivos de los diseños de sistemas de control retroalimentados esreducir la sensibilidad con respecto a los disturbios y las variaciones de parámetros de laplanta como se ve en la sección 3.4, los modos deslizantes en cualquier múltiplo soninvariantes a estos factores ya que estos actúan satisfaciendo las condiciones en unespacio de control (3.4.4) y (3.4.5). para sistemas linealesx& ( A A(t )) x Bu Qf (t )f (t ) ℜ′(5.2.1)Las condiciones de invariancia están formuladas en un sistema de términos y matricesde entrada(Drazenovic, 1969): los modos deslizantes en cualquier múltiplo soninvariantes respecto a la variación de parámetros A(t ) y el vector de perturbación f (t )en el caso de que A rango (B) y Q rango (B)o existen matrices LA y LQ (constantes o variantes en el tiempo)tal queQ BΛ Qsi las condiciones (5.2.2) se mantienen, la forma regular (5.2.1) es similar a (5.1.4)x&1 A11 x1 A12 x2 A BΛ Ax& 2 A21 x1 A22 x 2 u Λ A x Λ Q f ( t )Asumiendo que las variaciones de los parámetros de la planta y un sobresalto del vectorde perturbación Λ Q f (t ) fo son conocidas, s 0 pueden hacerse con un múltiplodeslizante en el sistema con control (5.1.7) bajo las condiciones adicionalesδ fo(5.2.3)una similar aproximación puede ser aplicada para desacoplar sistemas interconectadosx& i Ai xi l Aijj 1j ix j B i uii (1,., l )
Donde x i ℜ ni , u i ℜ mi Y Ai , Aij Y Bi Son matrices constantesLos términos de interconexión pueden ser manejados como perturbaciones y lascondiciones invariables puede ser reformuladas para cada subsistema Aij rango( Bi ) .Control discontinuo en cada i sistema.u i (α i δ i ) x sign ( si )x T x i ,., x l ,si C i x i ,Ci cons tan te ,TTsi ℜ miCon valores de α i Lo suficientemente altos pero finitos forzamos el modo deslizante en lavariable s i 0 gobernado por una ecuación de orden (n x m) la cual no depende del estadode los otros subsistemas, la dinámica de cada subsistema puede ser diseñada con unapropia selección de matrices Ci en la ecuación de la variable deslizante.5.3 compensadoresdinámicos en modos deslizantesEl valor de δ puede exceder el valor estimado del vector de perturbación (5.2.3) en mododiscontinuo (5.1.7) diseñando para rechazar perturbaciones, para amortiguar la acción decontrol, esto puede ser deseable para la amplitud del control del modo deslizante sí lamagnitud de la [perturbación decrece. Normalmente las perturbaciones no es posiblemedirlas, el cual es el principal obstáculo para diseñar un sistema de control con laspropiedades mencionadas. No obstante, es formulado,y la tarea es resolublepreferiblemente con Fuzzy con nociones previas de la clase de perturbación disponible.Si tenemos la perturbación en la ecuación de movimiento (5.2.1) con A 0 y satisface lacondición de invariancia (5.2.2) y dejamos a Q como una matriz constante. Entonces elsistema puede ser representado en la forma regular.x&1 A11 x1 A12 x 2(5.3.1)x& 2 A21 x1 A22 x 2 u Λθ f (t )Y la ecuación de modo deslizante en el múltiplo s Cx1 x2 0 (5.1.6), no depende delvector de perturbación. Asumiendo que los componentes del vector f(t) no pueden sermedidas y un “modelo de perturbación” es tomado en la forma de un sistema dinámicolineal variante en el tiempo.f(k)k 1 θ i (t ) f( i) 0i 1(5.3.2)Los coeficientes escalares θ i (t ) Pueden variar arbitrariamente alrededor de ciertosintervalos.θ i (t ϑ i0(5.3.3)Si asumimos que ninguna condición inicial ni tampoco funciones θ i (t ) Son mensurables ysolo los rangos ϑi 0 son conocidos. La ecuación (5.2.3) encierra una amplia variedad declases de perturbaciones. Para k 2 están incluyen funciones exponenciales y armónicas,polinomios de cualquier potencia finita(comenzando desde un cierto tiempo), todos losproductos de esas funciones, etc.El controlador esta diseñando como un sistema dinámico con control u como una salida.
k 1u ( k ) d i u ( i) v(5.3.4)i 1Donde di son coeficientes escalares constantes cuya selección esta dictada solo por laconveniencia de la implementacion.La entrada v puede ser seleccionada como parte de la función lineal del controlador y elsistema de estado. Cada control m del sistema tiene un elemento de k-esimo ordendinámico, el orden total del sistema es igual a n mk. El estado coordenado del sistemadinámico adicional puede ser medido.Permitiéndonos escribir las ecuaciones de movimiento del sistema extendido en elespacio consistiendo este de x 1, x 2, ,x k 2, six& x i 1( i 2 ,., k 1)(5.3.5)Dado que x& 2 x 3 y deduciendo de la segunda ecuación (5.3.1) queu x A21 x1 A22 x 2 Λ Q f(5.3.6)Diferenciando (5.3.6) k veces y substituyendo en el lado derecho de (5.3.1), (5.3.5) y(5.3.6) derivada respecto al tiempo xi y u, obtenemosi 2u (i ) x i 3 Aij x j Λ Q f (i )j 1(i 1,., k 1)(5.3.7)k 2u ( k ) x& k 2 Akj x j Λ Q f ( k )(5.3.8)j 1Aij yDondeAkj Son matrices constantes. Por substitución de los valores de lasderivadas u (i ) de (5.3.7) y (5.3.8) en (5.3.4) y reemplazando la k-esima derivada del vectorde perturbación en conformidad con (5.3.2) por una combinación lineal de vectores f,.,fk-1 obtenemosk 2k 1i 1i ox& k 2 x i 3 Ai x i (d i θ i (t ))Λ Q f ( i) vdonde Ai son matrices constantesTeniendo en mente que los vectores Λ Q f(5.3.9)(i )(i 0,.,k-1)pueden ser calculados dela forma (5.3.7), la ecuación (5.3.9) puede representarse comok 2k 1i 1i ox& k 2 A (t )i x i (d i θ i (t ))u (i ) v(5.3.10)Donde A (t )i son matrices dependientes de θ i (t ) , y subsecuentemente del tiempo.anotación de introducciónx T [ x1T x 2T ], x1T [ x1T .x kT 1 ], x 2 x k 2 , u T [u T u& T .(u ()k 1 ) T ]k 1(i ) (d i θ i (t ))u θ (t )ui 0θ [(d i θ i (t )).(d i θ k 1 (t ))]y escribiendo la primera ecuación en (5.3.1), en la ecuación (5.3.5) y la ecuación (5.3.10)como
dx1 A11x1 A12 x 2dt(5.3.11)dx 2 A21 (t ) x1 A22 (t ) x 2 θ (t )u vdtDonde A11 y A12 son matrices constantes; A21 (t ) , A22 (t ) y θ (t ) son matrices variantes enel tiempo con elementos definidos donde los coeficientes de θ i (t ) en la ecuación (5.3.3)están también definidos.El sistema (5.3.11) esta en forma regular y controlado por x 2 como un control intermediarioen el primer bloque, la dinámica deseada puede ser asignada con una propia selección dela matriz C en x 2 Cx 1 . entonces siguiendo la metodología de la sección 3.3 , el mododeslizante es forzado en el múltiplo s x 2 Cx 1 0 por medio del controlv (α ( x1 x 2 u ) δ ) sin g (s ) 0(5.3.12)y por supuesto la derivada respecto al tiempo de la función de Lyapunov aspiranteV 1 2 s T sV& s T ((CA11 A21 ) x1 (CA12 A22 ) x 21 θ u ) (α ( x1 x 2 u ) δ ) sEs negativo para un suficientemente alto, pero finito valor de α y cualquier δ. después deun intervalo finito de tiempo, el modo deslizante controlado pordx1 ( A11 A12C ) x1(5.3.13)dtPuede pasar con la deseada dinámica y propiedades de invariancia con respecto a lasperturbaciones.El objetivo del diseño fue decrementar la magnitud del control con el decrecimiento de lasperturbaciones sin medición de las mismas. Este es el caso para nuestro sistema: en lasolución para (5.1.13), x1 (t ) y x 2 (t ) tienden a cero, la funciónu ( i ) tiende a ΛQ f(i )(5.3.7) dado que u ( i) i 1,.,(k-1) son componentes del vectoru , el control v(5.3.12) decrece con las perturbaciones. La salida del sistema dinámico adicional u esuna función continua y tiende a Λ Q f , el cual gobierna el rechazo de la perturbación.En sistemas reales, frecuentemente no es necesario introducir un sistema dinámicoadicional; esta parte puede desempeñarse con los actuadores que tienen salidascomúnmente medibles, entonces, el control diseñando es para la entrada del actuador ysu magnitud depende de las perturbaciones y sus derivadas.Ejemplo 5.1El método de rechazo de perturbaciones puede ser ilustrado con un sistema de segundoorden done la planta y el actuador son integradores (Fig. 5.1), una perturbación externa f(t)es aplicada a la planta y no es accesible para ser medida . El control u esta diseñandocomo una parte de la función lineal del valor regulado x x1 que puede ser reducido acero pero también la salida y del actuador. entonces el comportamiento de la planta estagobernado por de primero y segundo orden , respectivamente:u x2 fx&1 x 2x& 2 v f(5.3.14)
Figura 5.1 compensador dinámico de modo deslizante en un sistema de segundo ordenseleccionando el control para el sistema (5.3.14) en forma similar a (5.3.12)v (α ( x1 β u ) δ ) sign(s), s x 2 Cx1 Con α, β y c 0 siendo coeficientes constantes. elcontrol puede ser escrito comov ψxi ψ u u δsign (s )dondeψ α sign ( xi s )ψ u βsign ( us )el sistema (5.3.14) esta controlado en parte por ecuaciones diferenciales linealesx&1 x2x&2 ψx1 ψ u x2 δsign ( s) ψ u f f&Así fue visto para un sistema similar de segundo orden sin perturbaciones en l sección2.1 (con f (t ) 0 ),los coeficientes de control pueden ser elegidos tal que el estado seaalcanzando la conmutación de línea. Y el modo deslizante es forzado a alcanzar cadapunto de esta línea, después de un intervalo finito de tiempo, el estado tiende a cero enmodo deslizante con la ecuación de movimiento x& cx 0 . Los planos de estado de dosestructuras lineales inestables del sistema se muestran en la figura 1.9 y el plano deestado del sistema asintoticamente estable con estructura variable se muestra en lafigura 1.10, si f(t) 0 , son puntos singulares( x& x&2 0 ) para cada una de las cuatroestructuras lineales, correspondientes a las cuatro combinaciones de α y β sondesplazadas de la original. Las magnitudes y signos de los desplazamientos dependende los coeficientes α, β y las perturbaciones f(t). La figura 5.2 muestra en forma separadaa la derecha y a la izquierda de los semiplanos del sistema del plano de estado para elárea x 2 f (t ) , donde sing(u) -sing(f(t)) por virtud de la ecuación de planta. Losactuadores de primer orden toman parte en el sistema dinámico adicional (53.4), de estamanera la perturbación f(t) es asumida para satisfacer las condiciones de (5.3.2) parak 1 ;f& θ ( f ) fθ (t ) βEl plano de estado muestra que los puntos singulares son recorridas las trayectorias deestado en vecindad con las líneas conmutadas s 0 van directamente hacia el modo
deslizante que se presenta en el sistema.Figura 5.2 el plano de estado (a) semiplano derecho y (b) semiplano izquierdo.a misma conclusión se llega analíticamente, dado que sing(u) -sing(f(t)), el termino ψ u fen la ecuación de movimiento es igual a β f sign(s) y para los puntos x2 -cx1 en lalínea conmutadas& ( c 2 ψ u ψ ) x1 δ sign ( s ) β f sign ( s ) f&Los valores de s y s& tienen signos opuestos, o las condiciones (2.4.1)para que el mododeslizante pueda mantenerse debe existir α . c 2 β y un valor arbitrario δ positivo. Estocambia el signo en el termino principal y habilita una retroalimentación local para rechazarperturbaciones no mensurables. Estrictamente hablando, las curvas de la figura 5.2 noson trayectorias de estado porque las perturbaciones hacen que el sistema varíe en eltiempo, cada curva puede estimarse por el lugar de los puntos para el cual, en cadatiempo fijo, la tangente de la curva coincide con el vector de velocidad de estado.5.4 Formulade AckermannLa Formula de Ackermann para estados lineales retroalimentados nos permitendeterminar en forma explícita la ley de control escalar así puede ser obtenido un sistemacon los eigenvalores deseados ( Ackermann 1992) u trabajo similar serie cuando sediseña el control con modos deslizantes en sistemas lineales con discontinuidadeslineales de superficie donde la ecuación de modo deslizante correspondiente es lineal ydepende de los coeficientes de la ecuación de superficie . la tradicional metodología parael diseño del control con modos deslizantes implica transformaciones del sistema lineal ala forma regular (sección 5.1) consiste en dos bloques y manejando el vector de estadoEn uno de los bloques como un control ficticio.En esta sección el método de diseño del control escalar de modos deslizantes descansaformula de Ackermann que esta orientada a obtener una ecuación del plano discontinuaen forma explícita tan bien como en términos del sistema original, sin transformar en unaforma regular (Ackermann y Utkin, 1998). Para la operación de una planta lineal bajocondiciones de incertidumbre, el control por modos deslizantes fuerza a controlar losmovimientos con una ecuación lineal con los deseados lugares de eigenvalores eindependientemente de las perturbaciones.Considerando el sistema controlable descrito por la ecuación diferencial
x& Ax b (u f ( x, t ))(5.4.1)Donde x es un vector de estado de n-dimension, u es el control escalar, A y b son unamatriz y vector conocidos, y f(x,t) es una perturbación no lineal con sobresalto superiorconocido f ( x, t ) f 0 ( x , t ) .De (5.4.1) donde los vectores de control y de perturbación (bu y bf) son colineales , así quela condición de invariancia (5.2.2) es cumplida; Consecuentemente el modo deslizante encualquier plano es invariante respecto a las perturbaciones.El diseño del modo de control deslizante en (5.4.1) implica la selección de un planos c T x 0 ( c T es una constante de un vector fila n-dimensional y por consiguiente eldiseño del modo de control fuerza a s 0. la ecuación de modo deslizante del orden (n-1) yn depende de las perturbaciones. Las propiedades dinámicas deseadas pueden sercondicionadas por una correcta selección de el vector c. tradicionalmente, la ecuaciónde modo deslizante es primeramente deducida y entonces los métodos convencionalesde la teoría lineal es aplicada.El propósito de esta sección es como usar la formula de Ackermann, el vector c puedeser hallado en forma explícita sin la ecuación de movimiento deslizante. tan lejano comola tarea concerniente al lugar de eigenvalores, los deseados eigenvalores λ1 , λ 2 ., λn delx& Ax bu puede ser asignada usando la formula de Ackermannsistema lineal(Ackermann 1992):ua k T xk T e T P( A)(5.4.2)dondee T [0 .0][ b Ab. . An 1b ] 1P (λ ) (λ λ1 )( λ λ2 ).( λ λn 1 )( λ λ n )Suponiendo ahora que los valores reales y los pares conjugados complejos deλ1 , λ 2 ., λ n 1 son los eigenvalores deseados del modo deslizante.teorema 5.1sic T eT P1 ( A)con P1 (λ ) (λ λ1 )(λ λ 2 ).(λ λn 1 ) p1 p 2λ . p n 1λ(5.4.3)n 2n 1 λDonde λ1 , λ 2 ., λ n 1 son los eigenvalores1 del modo deslizante en el planos cTx 0.demostraciónde acuerdo a la formula de Ackermann (5.4.2) λ1 , λ 2 ., λn son eigenvalores de la matriz,A* A bk T , con λ n comenzando en un valor arbitrario, el vector c T es el eigenvectorderecho de A* correspondientes a λ n , efectivamente, como en (5.4.2) y (5.4.3),c T A* c T A c T beT P( A)dado que
c T b e T P1 ( A)b [ 0 0 . 0 1][b Ab . An 1 b ] 1[b Ab . An 1 b ][ p1 1y P( A) P1 ( A)( A λ n I ) , de esta manerap21] (5.4.4).c T A* cT A c T P1 ( A)( A λn I )las cuales se reduce con (5.4.3) ac T λ n cT(5.4.5)el sistema x& ( A bk ) x b(u u a f ( x , t )) Es ahora transformado a s c x adecuandoTTel ultimo estado y el primer n-1 estado x * [ x 1 x 2 . x n 1 ]T permaneciendo invariante.Ej. x * I 0 T x Tx s c Para que T sea invertible él ultimo componente de c T debe ser diferente de cero, puestoque es así, la condición puede ser satisfecha, reordenando las componentes del vectorde estado x. bajo condiciones (5.4.4.) y (5.4.5), el sistema transformado esx& * A1 x * a s s b * (u u a f ( x, t ))(5.4.6)s& λ n s u u a f ( x , t )(5.4.7)donde A1 a s T 1 0 λ T ( A bk )T n b * Tb 1 El espectro de la matriz A1 consiste de los deseados eigenvalores. λ1 , λ2 ., λn 1 .Para deducir la ecuación de modo deslizante en el plano s 0, la solución a la ecuaciónalgebraica s& 0 con respecto a u puede ser substituida en (5.4.6). resultando enx& * A1 x *(5.4.8)Con la dinámica deseada, independientemente de las perturbaciones desconocidas f(x,t). El resultado tiene una interpretación geométrica transparente. El vector c T es uneigenvector derecho de A* correspondientes a los eigenvalores λ n . Esto significa que elplano s c T x 0 es un subespacio invariante decon el movimiento determinado por elconjunto previamente seleccionado de (n-1) eigenvalores λ1 , λ2 ., λn 1 el modo deslizantees forzado al plano s c T x 0 el cual despliega la deseada dinámica. Note que el diseñodel plano s c T x 0 no implica la asignación de los eigenvalores λ n ; y solo aparece en lacomprobación del teorema y puede hacerse con valores arbitrariosEl control discontinuo u esta diseñando para forzar el modo deslizante en el plano s 0.Esto implica que las condiciones (2.4.1) deben ser satisfechas, ej. los valores de s y s&deben tener diferentes signos en la vecindad del plano:s c T Ax u ( x , t )(5.4.9)u M ( x, t )sign(s)
donde M ( x , t ) es seleccionado tal queM ( x, t ) C T Ax f 0 ( x , t )Si el control puede tomar solo dos valores extremos M 0 o M 0 (lo cual es común en lasaplicaciones)entonces (5.4.9) con M ( x , t ) M 0 fuerza a un modo deslizante en el planos 0 controlado por (5.4.8) es lo adecuado, por supuesto, el dominio o condición inicial ylas perturbaciones pueden ser definidos.Ejemplo 5.2si tenemos λ -1 si existen los eigenvalores deseados del movimiento deslizante para elsistema de segundo ordenx& Ax b (u f ( x, t ))donde 0 0 A 0 1 conforme a (5.4.3)c T [ 0 1][b x x 1 x2 P1 ( A ) A IAb ] 1 P1 ( A)c T [1 2 ]y la ecuación deslizante de superficie es de la forma (note que c T b 1 )s x1 2 x 2 0por el método de control equivalente, la solución del sistema s 0,x2 y uu eq x1 f ( x1 , t ),x2 s& 0 con respecto a1x12pueden ser substituidos en el sistema original para obtener la ecuación de movimientodeslizantex&1 x1El modo deslizante esta determinado por los eigenvalores λ -1 y no depende de lasperturbaciones de f ( x , t ) .El procedimiento de diseño basado en la Formula de Ackermann esta resumido comosigue:1. El espectro deseado del movimiento deslizante λ1 , λ2 ., λn 1 es seleccionado.2. La ecuación del plano de discontinuidad s c T x 0 se encuentra comoc T e T ( A λ1I )( A λ 2 I ).(A λ n I )3. El control discontinuo (5.4.9) es diseñando.Observación 5.1De (5.4.9) el modo deslizante puede ser forzado en un sistema impasible poru (α x δ ) sign( s) con algunos números de finitos y positivos de α y cualquier positivoδ, el control se reduce en el sistema con modos deslizantes estables asintoticamente.5.4.1 simulación de resultados
El procedimiento de diseño puede ser demostrado para estabilización por modosdeslizantes de un péndulo invertido (figura 5.3) subordinado a una circunscripción conuna fuerza de perturbación desconocida. la linealizacion de las ecuaciones de movimientotienen la siguiente forma (Kortüm y Lugner, 1994):x& Ax b (u f ( x, t ))donde 0 0A 0 000a 32a 421 0 0 1 0 0 0 0 0 0 b b 3 b 4 x α x x& α& figura 5.3 péndulo invertido con sistema de carrilloya 32 3( C mga ) / a ( 4 M t m )a 42 3 ( 4 M t m )( C mga ) / a 2 m ( 4 M t m )b3 4 /( 4 M t m )b 4 3 /( 4 M t m )M t Y m son las masas de la carretilla y el péndulo, 2a es la longitud del péndulo, C laresistencia de resorte, g 9.81m s 2,u yf(t)son el control y las fuerzas deperturbación, f (t ) f 0 constante y f 0 se asume que es conocida.El modo de control deslizante es diseñando para M t 5, , m 1,a 1, c 1 , conλ1 1,λ 2 2,λ3 3 son los eigenvalores deseadospara el movimientodeslizante, de acuerdo a (5.4.3) la ecuación del plano de discontinuidads cT x 0c T [0 0 0 1][ b Ab A 2b A3b ] 1 ( A I )( a 2 I )( A 3I )I es una matriz identidadpara los valores dados de los parámetros de las matrices A y Bc T [ 4.77 48 .4 8.75 18 .7]el control asume que se toman solo dos valores extremol:u M 0 sign (s)M 0 cons tan te
de los anteriores estudios, para cualquier M 0 f 0 , donde hay un dominio decondiciones iniciales tal que el modo deslizante es forzado en el plano s 0 , el ejemplo demodos de control deslizante de la simulación tieneM 0 40f (t ) f 0 sin( 3t ),f 0 0 .5La figura 5.4 muestra el proceso de estabilización para las condiciones inicialesx (0) 0.5,α ( 0) 0.2,x& ( 0) 0,α& ( 0) 0El modo deslizante ocurre después de in intervalo finito de tiempo y en lo sucesivo ambascoordenadas x y α no dependen de las variaciones de las perturbaciones tiempo-variable,y ellas tienden a cero, el sistema sin retroalimentación es inestable y el control estadefinido, de esta manera el movimiento puede llegar a ser inestable cuando lascondiciones iniciales se incrementan. El sistema es aun estable para α 0.38 (figura 5.5) yes inestable para α 0.39(figura 5.6).
Figura 5.4 Modo de control deslizante de un péndulo invertido x(0) 0.5, α(0) 0.2.
Figura 5.5 Modo de control deslizante de un péndulo invertido α(0) 0.38.
Figura 5.6 Modo de control deslizante de un péndulo invertido α(0) 0.39.
Figura 5.7Modo de control deslizante de un péndulo invertido, sistema imperturbable conmagnitud de control de estado dependienteComo se explico en el comentario 5.1 el modo deslizante puede ser forzado en unsistema imperturbable (f(t) 0) para condiciones arbitrarias iniciales como parte delcontrol linealu β ( x x& α α& δ ) sign ( s )Donde β y δ son valores positivos y valores finitos de β y valor arbitrarios de δ.El resultado de la simulación con β 30, δ 0, x(0) 1, x& (0) 0 , α(0) 1, y α& (0) 0 semuestran en la figura 5.7. Ambos el vector de estado y el de control tienden a cero enmodo deslizante.5.5 Salidaretroalimentada en modos de control deslizantesLa implementacion del método desarrollado en la sección previa implica que todos loscomponentes del vector d estado deben ser medibles, sin embargo, esto no es posible ensituaciones practicas, dos aproximaciones pueden ser estudiadas para estos casos. Elprimer método es el diseño de los observadores del estado para establecer el vector delestado usando las mediciones disponibles de algunos estados. Y el segundo método es
derivar una clase de sistemas tal que la tarea del control puede ser resuelta diseñando uncontrolador retroalimentado de salida estática. La segunda aproximación al diseño delmodo de control deslizante bajo información incompleta sobre los estados del sistema seestudia en esta sección. Los métodos de diseño del observador se estudian en el capítulo6.si asumimos para el sistemax& Ax Buy Cx(5,5,1)(5,5,2)con el vector de la salida y de l-dimensión(i)(ii)(iii)El par (A, B) es controlable y el par (A, C) es el observableEl rango B m y el rango de C 1l mEl sistema (5.5.1), (5,5,2) es descrito como salida polo-asignable si lo eigenvalores de lamatriz A BLC, o un sistema retroalimentado con control lineal u Ly (L es unaconstante de la matriz m x 1) toma cualquier valor deseado. La clase de tales sistemaslineales puede ser encontrada de acuerdo con el resultado bien conocido de Kimura(1975).Teorema 5.2si el sistema (5,5,1), (5,5,2) es controlable y observable y satisface la relaciónn 1 m-1(5.5.3)Entonces este polo-asignable por ganancia en la retroalimentación de la salida. ElTeorema será utilizado luego para la asignación de polos en sistemas con control demodo deslizante.Existe una transformación no singular de coordenadas que reduce el sistema a la formaregular (véase también la sección 3,3): x&1 A11 A12 x1 o (5,5,4) x& A u 2 21 A22 x2 I m Don
Control De Sistema Lineales El objetivo de este capitulo es demostrar la metodología del control de modos . lugar de los eigenvalores en un sistema lineal multidimensional invariante en el tiempo x& Ax Bu (5.1.1) Donde x y u son vectores de estado y control de dimensión n y m, respectivamente, A y B