Transcription
ROBUST TIMEKEEPING IN CIRCADIANNETWORKS: FROM GENES TO CELLSNeda Bagheri ,1 Stephanie R. Taylor ,1Kirsten Meeker Linda R. Petzold Francis J. Doyle III ,2 Dept. of Electrical and Computer Engineering, Universityof California Santa Barbara 93106-9560, U.S.A. Dept. of Computer Science, University of CaliforniaSanta Barbara 93106-5070, U.S.A. Dept. of Chemical Engineering, University of CaliforniaSanta Barbara 93106-5080, U.S.A.Abstract: Systems theoretic tools, including mathematical modeling, controltheoretic analysis, and feedback design, advance the understanding of the circadianclock: a set of noisy oscillators that communicate to ensure its function as a reliablepacemaker. The clock’s internal time, or phase, is a key performance measureused to investigate dynamics of a single deterministic oscillator for the purpose ofgenerating insight into the behavior of coupled stochastic oscillators. The analysisof a single oscillator identifies appropriate coupling mechanisms for an ensemble ofstochastic oscillators. Phase also serves as a critical control objective for a modelpredictive control algorithm that aims to correct mismatch between the biologicalclock and its environment.Keywords: Phase dynamics, circadian rhythms, analysis, control, performance.1. INTRODUCTIONBiological systems are characterized by complex dynamics. Undergirding a system’s functionare networks of interacting components (Sontag,2004). To elucidate the mechanisms employed bythese networks, biological experimentation andintuition are by themselves insufficient (Kitano,2002). In the field of systems biology, investigators formalize the dynamical interactions as1N.B. and S.R.T. contributed equally to this work.We thank H. Mirsky and P. Chang for insightful comments.2 Corresponding author: frank.doyle@icb.ucsb.edu.This project was supported in part by The Institutefor Collaborative Biotechnologies, DAAD19-03-D-0004;NIH, GM078993; IGERT NSF, DGE02-21715; The Research Participation Program between the US DOE andAFRL/HEP.mathematical models and subject these modelsto systems theoretical analyses, with the goal ofguiding further experimentation and increased understanding (Fall et al., 2005). A perfect exampleof biological complexity is the circadian clock,which coordinates daily physiological behaviors oforganisms across the kingdoms of life.The mammalian circadian master clock resides inthe suprachiasmatic nucleus (SCN), located in thehypothalamus (Reppert and Weaver, 2002). It is anetwork of multiple autonomous noisy oscillators,which communicate via neuropeptides to synchronize and form a coherent oscillator (Herzog etal., 2004; Liu et al., 2007). This coherent oscillatorthen coordinates the timing of daily behaviors,such as the sleep/wake cycle. Left in constantconditions, the clock will free-run with a period
of only approximately 24 hours and its internaltime, or phase, will drift away from that of itsenvironment. Thus, vital to a circadian clock isits ability to entrain to external time through environmental factors (Boulos et al., 2002; Dunlap etal., 2004; Daan and Pittendrigh, 1976a). To studythe timekeeping abilities of the circadian clock, weemploy a systems biology approach. Mathematicalmodels are used in two complementary investigations, one involving the network of coupled oscillators, and the other involving the single coherentoscillator. In both cases we investigate the phaseresponse behavior.Proper phase response behavior is critical for synchronization both to environmental factors suchas light, temperature, nutrition intake, and social interaction (Boulos et al., 2002; Dunlap etal., 2004; Daan and Pittendrigh, 1976a), and toother oscillators via intercellular signals such asvasoactive intestinal polypeptide (VIP) (Herzog etal., 2004; To et al., 2007). To study this behavior,phase response curves (PRCs) are collected. Bymapping the arrival time of a stimulus to itsresulting phase shift (advance or delay), the PRCcharacterizes the clock’s time-dependent sensitivity to the given stimulus. In experimental settings,the best-studied factor is light (Daan and Pittendrigh, 1976b; Johnson, 1999; Winfree, 2001). LightPRCs have been used extensively to predict andbetter understand how biological oscillators areentrained by light input (Johnson, 1999; Johnsonet al., 2003; Comas et al., 2006). A similar analysisis extended to mathematical models.Commonly, circadian clocks are modeled with ordinary differential equations (ODEs) as single,deterministic limit cycle oscillators (Leloup andGoldbeter, 2003; Forger and Peskin, 2003). Thesemodels are used to reverse-engineer both the internal composition (transcriptional feedback loops)of the clock and the process of entrainment bylight/dark cycles (Johnson et al., 2003; Geier etal., 2005). To capture the variability observedin biological data, additional models introducestochasticity, via multiplicative noise in stochasticdifferential equations (SDEs) (Ueda et al., 2002)or via a transformation from the differential equation setting to a discrete stochastic setting (Forgerand Peskin, 2005; Gonze and Goldbeter, 2006). Tocapture the network behavior, spontaneous synchronization of coupled oscillators is modeled forthe mammal and fly in (Ueda et al., 2002; Gonzeet al., 2005; To et al., 2007).Synchronization and entrainment are critical phenomena of the circadian network that dictate anorganism’s level of performance. To further ourunderstanding of such processes, we use ODEs,SDEs, and a discrete stochastic model in boththe network and single-cell setting. In Section 2we analyze synchronization of neurons in an SDEmodel by studying the phase response behaviorof a single, deterministic cell. In Section 3 wedefine a population of neurons through a discretestochastic model where the challenges associatedwith achieving synchronization are addressed viathe study of a single oscillator. Section 4 describesa strategy for correcting the phase mismatch thatarises when there is a difference between internaland external time.2. ANALYSIS OF AND PREDICTIONS FORCOUPLED OSCILLATORSWe analyze the phase behavior of an SDEmodel of 100 coupled neurons in the Drosophilamelanogaster circadian pacemaker (Ueda et al.,2002). In an investigation of potential couplingmechanisms, Ueda et al. have developed a framework in which there are 960 potential couplingmechanisms. Each coupling mechanism is constructed such that each cell contains a component that sends a signal which is received by itsneighbor cells. The signal then modulates a giventarget parameter. The authors show that a subsetof the target/signal pairs produce spontaneous(in phase) synchronization among the cells. Theydiscuss this phenomenon in terms of “day” and“night” systems, in which the mutual entrainmentoccurs in a manner similar to light (or dark) pulseentrainment.We expand upon their analyses by modeling all960 signal/target pairs. Of the 960, there are 84that produce (in phase) synchrony. However, notall synchronizing mechanisms produce the samebehavior. Notably, the period of oscillation isdifferent for each target/signal pair, with valuesranging from 20 hours to 37 hours. Because weare interested in rhythms that are circadian, weconsider only those pairs that produce periodsin the range of 20 to 28 hours. We examine therelationship between the signal/target pair andthe resultant period of the synchronized systemusing a combination of numerical experimentationand mathematical analysis with an infinitesimalanalog to the PRC. This is a step in pursuit ofthe fundamental question: What causes these coupling mechanisms to bring about synchronizationwhile the others fail? Understanding the transition from asynchrony to synchrony is a significantly more complicated endeavor; thus, we focuson a synchronized system.2.1 MethodsWe simulate the SDE system for the 82 signal/target pairs that cause synchrony with a“circadian” period. The data describe what will
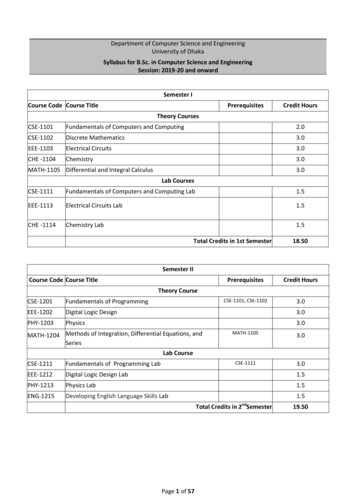
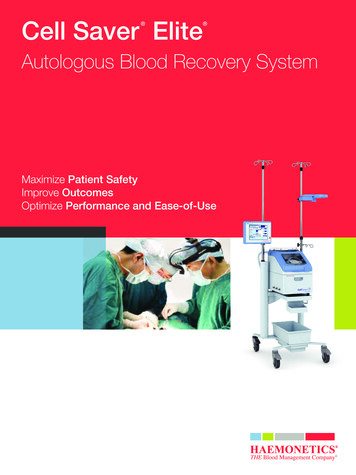
happen, but leave unanswered questions such as:Why are some signal/target pairs speeding upthe oscillations and some slowing them down?How would an adjustment of the relative timingbetween the signal and the cell’s phase changethe timing? There is a rich literature concerning the mathematical analysis of coupled oscillators (Kuramoto, 1984; Hoppensteadt and Izhikevich, 1997; Winfree, 2001; Brown et al., 2004).The most heavily studied systems, such as theKuramoto model, assume either that interactionsamong oscillators are sinusoidal (Kuramoto, 1984;Strogatz, 2000) or that they perturb state velocities directly (Brown et al., 2004). In circadianclock models, a signal sent to an oscillator ultimately manifests as the manipulation of a singleparameter. Thus, to study the effects of signalingon the phase behavior, we must examine the effects of parametric manipulation on phase behavior. This motivated us to develop the parametricimpulse phase response curve (pIPRC) in (Tayloret al., 2007), which predicts the oscillator’s velocity change in response to parametric perturbation.In the present work, we demonstrate its utility asa complement to numerical experimentation.To utilize the pIPRC, we are compelled to investigate a deterministic model. Thus, we study asingle neuron, modeled as a set of ODEs with astable attracting limit cycle, e.g. ẋ(t) f (x(t), p).The solution along the limit cycle is periodic withperiod τ , and we describe its progress along thecycle by its internal time, or phase, φ. When theclock is unperturbed, the phase progresses at thesame rate as time, i.e., dφ(x(t, p))/dt 1. Whenthe clock is perturbed the velocity response ispredicted by the pIPRC, i.e.pIPRC(φ) d φ(t).dt pConsider a signal pj (t, φ) which is a functioneither of time or phase. This signal will changethe oscillator’s velocity according to φ/ t pIPRCj (φ) pj (t, φ). Another interpretation isthat for a pulse of duration t, a phase shift is incurred according to φ pIPRCj (φ) pj (t, φ) t.Using this interpretation, the pIPRC is a predictorfor the PRC – the pIPRC characterizes the timingbehavior of an oscillator alone while the PRCdescribes the response to a particular signal. Tounderstand the period of the synchronized cellsof the Drosophila clock, we study the relationshipbetween the signal and the pIPRC for the target.We must acquire the signal. To begin, we capitalize on the stable synchrony – in a synchronizedsystem, each neuron sends the same signal at thesame time. Thus, we mimic the intercellular signaling simply by assuming that all signals matchthat of a single neuron. The trace of the signalis acquired by simulating one cell as it sends thesignal (without allowing the signal to feed backonto the cell). Two example signals along with thepIPRCs corresponding to their targets are shownin Fig. 2.Before we begin our analysis, we evaluate thepredictive power of the single cell model and ofthe pIPRC for each signal/target pair. First, wepredict the period of the synchronized SDE population by simulating the ODE model, allowing itto signal itself. After several cycles it converges toa new limit cycle with a new period – the periodof the synchronized system. In Fig. 1 we plot ourprediction for the new period against the observedperiod of the SDE model of the full population.The square of the Pearson correlation coefficient,R2 , is 0.91 and the data is located within an hourof the observed values. Second, we use the pIPRCdirectly to make similar predictions. By treatingφ as the independent variable (instead of time),we predict the change in period by assessing theeffect of the signal on the oscillator over a singlecycle. Integrating over the cycle,Zτ τ pIPRCj (φ) pj (φ) dφ,0we find that the predictions are qualitatively accurate. Fig. 1 shows the predicted period changeof the synchronized system versus the observedperiod change of the synchronized system. The R2value between observed and predicted periods is0.65. The data are more scattered than those fromthe full-cell simulation, though the majority arewithin 1 hour of perfect prediction. We concludethat although neither of these methods are perfectpredictors, their qualitative correctness supportsour approach.2.2 AnalysisFig. 2 contains the traces of two signal/targetpairs. Fig. 2(a) shows the relationship for a pairthat causes the system to slow down. In this case,the target reaction rate is the maximal rate ofdegradation for clock component tim mRNA. Thesignal arrives at the tail end of the advance zone,and is active during the deadzone and the firsthalf of the delay zone, leading to a cycle thatis slower than nominal. Fig. 2(b) shows a pairfor which the target reaction rate is the maximalrate of clk mRNA degradation. Here, the pIPRCshows nearly negligible delay regions. It followsthat, regardless of the phase relationship betweenthe signal and target, the oscillator will respondby speeding up.In both of these cases, and in all cases thatproduce synchrony, the relationship between the
2R 0.65 (o)272R 0.91 ( )100Observed τ 25.2119 2250122424Time [hr]36 148(a) Signal/Target Pair Producing Slow Oscillations2221222426Predicted τ [hr]28Fig. 1. Observed vs. Predicted Periods. For eachsignal/target pair that produces synchronythere is a black circle and a gray plus. Thex-axis position indicates the period predictedusing the pIPRC (circles) or using a singlecell, signaling itself (pluses). For both data,the y-axis position indicates the period observed once collection of noisy cells becomes(and remains) synchronized. Perfect predictions fall on the dotted line. The dashed andsolid lines represent the best fit by linearregression analysis, with R2 0.65 for thepIPRC-predicted data and R2 0.91 for thesingle-cell data.signal and target meets the criteria for stableentrainment (data not shown). If the signal arrivesearly (because the phase of the system is a littlebehind), the system is sped up more (or sloweddown less) than usual, and vice versa. The studyof the pIPRC and signal is consistent with the observed behavior – the mutual entrainment is stableand the system remains synchronized. However,meeting the conditions for mutual entrainment isonly a necessary factor; pairs arise that meet therequirements for stable entrainment but do notyield a transition to synchrony (data not shown).Figure 2(a) makes clear that a leftward signal shiftof several hours produces a greater overlap of theadvance region, meets the conditions for stable entrainment, and shortens the synchronized period.Thus, an understanding of the phase responsebehavior is key to unraveling the mechanisms invivo.3. STOCHASTIC MODEL OF COUPLEDMAMMALIAN CIRCADIAN NEURONSPhase response analysis is an important tool usedto predict the coupling mechanism used by themammalian clock. Evidence suggests that neuronsin the SCN are synchronized via the neuropeptideVIP (Herzog et al., 2004). VIP levels are high2100Observed τ 22.6764 201224Time [hr]36Signal23Relative pIPRCObserved τ [hr]262SignalRelative pIPRC28 148(b) Signal/Target Pair Producing Fast OscillationsFig. 2. Shown are the pIPRC (black dotted line)and signal trace (gray solid line) pairs thatcause the coupled SDE system to synchronizewith (a) long and (b) short periods. All curvesare relative to the target parameter’s nominalvalue; i.e., each signal represents fractionalchanges in the target parameter’s value andeach pIPRC predicts the velocity response tofractional changes.during the subjective day, and preliminary resultsshow that VIP signals cause light-like phase shifts.Thus, the VIP signal is similar to the light signal,and the VIP target is similar to the light target. Data show that both VIP and light inducePer transcription (Piggins et al., 1995), and it ispredicted that the target of VIP signaling is Pertranscription. Using this evidence, the authors of(Hao et al., 2006; To et al., 2007) model postulatedmechanisms in which VIP signals are receivedby a cell through signal cascades culminating inthe modulation of the parameter associated withPer transcription. Using an ODE model, To etal. incorporate this coupling mechanism into apopulation of non-identical cells, each of which isbased on the gene regulatory network model of(Leloup and Goldbeter, 2003). They simulate scenarios in which (1) no coupling is present (and thecells drift out phase) and (2) coupling is present(and the cells form a coherent oscillator), thusdemonstrating that their mechanism is capable ofcreating the spontaneous synchronization seen inthe data.Biological experiments show that uncoupled neurons are either damped or sloppy oscillators (Atonet al., 2005). The periods of isolated neurons showboth a broad distribution of periods and temporal(cycle-to-cycle) variability (Herzog et al., 2004).The model presented in (To et al., 2007) showsa broad distribution of periods across cells, but
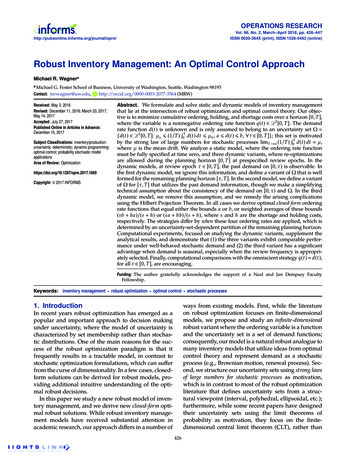
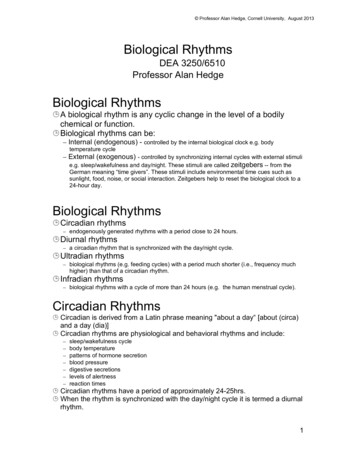
none of the cycle-to-cycle variability. To introducethat variability, we develop a stochastic modelthat builds on these efforts, adding the intrinsic noise due to the discrete nature of reactionsin the SCN neuron. The present model employsa 2-dimensional grid of 9 SCN neurons and isthe discrete stochastic version of the model in(Leloup and Goldbeter, 2003) with the couplingmechanism from (To et al., 2007). Preliminaryresults, synchronizing a small number of coupledcells, support the validity of the mechanism in thepresence of noise. For a more detailed descriptionof the signaling mechanism, see Equations 1-7and Table 1 in the model supplement of (To etal., 2007).equation,M P (x, t x0 , t0 ) X [ aj (x νj ) tj 1P (x νj , t x0 , t0 ) aj (x)P (x, t x0 , t0 )].(1)The stoichiometric matrix νij describes how thepopulations of species change with each reactionand has dimensions of number of species i 1, · · · , N by number of reactions j 1, · · · , M .The propensity function aj predicts the probability of each reaction occurring during the next infinitesimal time interval, given the current speciespopulations. We use StochKit (StochKit, 2007)package, a stochastic simulation tool developed atUniversity of California, Santa Barbara, to simulate the two dimensional grid of neurons using theSSA.3.2 Oscillatory Range of Per Transcription RateThe introduction of noise alters the behavior ofthe single cells such that additional tuning isrequired to achieve synchrony. In particular, because VIP signaling ultimately manifests as modulation of the rate of Per transcription, specialattention must be paid to the levels of Per mRNAPer mRNA Concentration [nM]and its rate of transcription, νsP (t). The basalrate, νsP 0 , characterizes the behavior of an isolated cell. Per mRNA for several νsP 0 are shownin Fig. 3. The depletion or accumulation of permRNA that occurs when νsP 0 is below 1.2 orabove 1.8 indicates that we have upset the balancebetween (1) the transcription rate and (2) thecombination of the transport (from nucleus tocytoplasm) and degradation. The current modelnormalizes the coupling for the size of the grid,but does not maintain the median of νsP (t) ascoupling is added. For the coupled populationto exhibit synchrony, we have observed that themedian value of νsP (t) must stay within the rangethat produces oscillations in an individual cell.Thus, to achieve synchrony, the basal transcription rate νsP 0 is decreased to 1.0 for the couplingweight used in the present work. This produces3.1 Discrete Stochastic Simulationa median per mRNA population comparable toThe stochastic simulation algorithm (SSA) (Gillespie, the uncoupled case with νsP 0 1.5. At this basaltranscription rate, all isolated cells are damped1976; Gillespie, 1977) generates exact trajectoriesoscillators. To better match the biological obserof the populations of chemical species, given avation that many isolated cells show sustaineddescription of the reaction system consisting ofoscillations, it is necessary either to weaken thethe stoichiometric matrix, νij , and the propencoupling or to adjust the transport or degradationsity functions aj . The probability density funcrate to re-balance the per mRNA level.tion P (x, t x0 , t0 ) is defined as the probability thesystem will be in state x at time t, given that itwas in state x0 at time t0 . The time evolution ofν 1.0sP06P (x, t x0 , t0 ) is described by the chemical masterν 1.5sP0ν 2.0sP054321050100150Time [hr]200Fig. 3. Per mRNA concentration as a functionof basal transcription rate νsP 0 in uncoupledcells. For νsP 0 below 1.2 per mRNA concentrations exhibit damped oscillations for theten day period simulated. For νsP 0 above 1.8per mRNA concentrations begin to grow inamplitude with minima greater than zero.3.3 Discrete Stochastic SimulationThe results of a single simulation trajectory of a3x3 grid of coupled cells are shown in Fig. 4(a) and
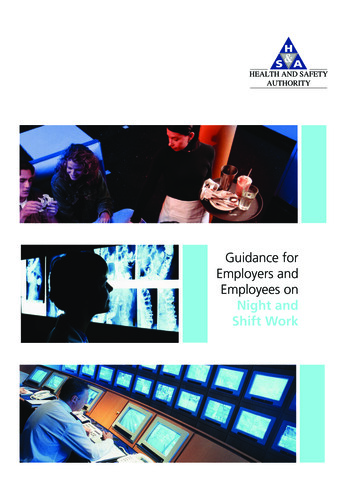
Fig. 4(b). The radius r(t) of the complex orderparameterr²iΨN1 X iθj ²N j 1(2)measures the phase coherence of the collectiverhythm of N coupled oscillators (Strogatz, 2000).If the oscillators are in phase, then r 1. θjare the phase of each oscillator and Ψ(t) is theaverage phase. The increase in r(t) from 0.6 to0.8 in one cycle is comparable to the results from(To et al., 2007), where a deterministic model withnormal distribution of some of the parameters wasused to create a grid of coupled heterogeneouscells.Per mRNA Concentration [nM]The difference in peak amplitudes in Fig. 4(a) isdue to the small grid and the effect of its boundaries. The discrete stochastic simulation of largergrids is a goal of this research and will require improvements in code performance. Reproducing theperiod and cycle-to-cycle variability of uncoupledsingle neurons will require increasing the effectivenoise level by lowering the volume. This study,done at a high volume, demonstrates a method forbalancing the coupling strength that will producephase coherence with a basal Per transcriptionrate that will sustain oscillations.54As signaling among a network of cells serves tosynchronize the phase of the individuals, signalingfrom the environment serves to entrain the phaseof the emergent coherent oscillator. Thus, thelight signal received by an organism induces phaseshifts that calibrate its internal phase to externaltime. In this section the clock is regarded asa single deterministic oscillator and we apply amodel predictive control (MPC) algorithm as atool to minimize the phase difference between theorganism and the environment.In the early 1970’s, Daan and Pittendrigh investigated light-induced phase shifts in free-runningorganisms through the development of phase response curves. Watanabe et al. (2001) build uponDaan and Pittendrigh’s investigation of lightinduced phase shifts in free-running organismsby proving that the basis for phase entrainmentin mammals involves both advance and delaycomponents of the phase response curve . Bouloset al. (2002) extend the investigation/applicationof phase response curves by establishing brightlight treatment as a means to accelerate circadian re-synchronization rates. In a previous study,a closed-loop model predictive control algorithmthat relies on an evolutionary strategy to determine an optimal sequence of light pulses is used toreset the organisms’ phase (Bagheri et al., 2007).In this study the optimal sequence of light inputsis determined as a function of MPC tuning parameters as well as the attributes of the drivingforce (light).34.1 A Mammalian Model210050100150Time [hr]200(a) Per mRNA in Coupled 3x3 Grid1r(t)4. PHASE AS A CONTROL OBJECTIVE0.80.6024Cycle6A detailed model that describes circadian dynamics of a single mammalian cell through 61ODEs serves as the example system (Forger andPeskin, 2003; Mirsky et al., 2007). It may begenerally defined as a set of nonlinear ordinarydifferential equations where t is continuous intime, x(t) defines the n-length state vector, L(t)defines the environmental light input, u(t) definesthe controlled light input, and f (x(t), L(t), u(t))defines the n-length system dynamics:8(b) Complex Order Parameter Radius for 3x3 CoupledGridFig. 4. For a single SSA simulation of a 3x3 gridof coupled cells (with Ω 2000), we show(a) the trajectory of Per mRNA concentration over time, and (b) its degree of phasecoherence.ẋ(t) f (x(t), L(t), u(t)) ,(3)x(t0 ) x(0),where x(t) n 1 , L(t), and u(t) 1 1 . Oncethe asymptotically stable nonlinear oscillator converges to a limit cycle, it exhibits a period τ :x(t τ ) x(t). In this paper, the nominal model(a version of the model that has converged to thenatural light/dark environment where u(t) 0
and L(t) oscillates as a square wave between values 3.39E-2 and 0) is used to define the referencetrajectory, r(t). A circadian time of 0 reflectsdawn while a circadian time of 12 reflects dusk,assuming regular 24 hour day:night cycles.4.2 MPC of Light PulsesA model predictive control strategy (Henson andSeborg, 1997; Morari and Lee, 1999) is used to increase the re-synchronization rate of circadian oscillators through the systematic addition of light.The control algorithm steps through state trajectories at ts -hour intervals, where k serves as thediscrete time index reflecting the current simulation time t evaluated at ts intervals. In this work,the time step and duration of the manipulatedcontrol variable, light, are equivalent.The manipulated light profile, u(t), optimizes anopen-loop performance objective on a time interval extending from the current time to thecurrent time plus a prediction horizon, P 54hr,allowing the algorithm to take control action atthe current time in response to a forecasted error.The move horizon limits the number of controlledlight pulses within the prediction horizon; M 3hr. Beyond M hours of simulation, the predictedmodel defaults to u(t) 0. Future behaviors for avariety of control inputs are computed accordingto a model of the plant.The algorithm chooses a series of control inputsby minimizing a performance criterion over afuture horizon. Once the most fit control sequence,u M/ts 1 , only the first control, u (1), isimplemented. Feedback is incorporated by usingthe next measurement to update the optimizationproblem for the next time step.Assuming umin (t) -3.39E-2, umax (t) 3.39E-2,and L(k) u(k) 0, the performance functionpenalizes the normalized predicted error betweenthe reference and controlled trajectories, e(k),and its corresponding control sequence, u(k). Toavoid penalizing transient effects, the state erroris weighted uniformly over the move horizon andwith increasing weight of slope 2 over the prediction horizon (via Q). The cost of applying a lightinput is always weighted uniformly (via R). Thecost of implementing an M -length control inputu(·) beginning at time k that minimizes the errorover P hours is defined ashiTTJ min (eQ) (eQ) (ūR) (ūR) .u(·)(4)Once the controlled state trajectories converge towithin 15% of the corresponding nominal (or reference) state trajectories, the system is consideredto be in phase: Tr mink [ e(k) 0.15]. Forfurther details concerning the MPC algorithm,please refer to (Bagheri et al., 2007).4.3 MPC Tuning ParametersThe optimum control sequence, u , is determinedby enumerating the solutions over a grid in thesolution space (light magnitude as a functionof time). The algorithm approaches a globallyoptimal solution as the total possible quantizationsteps of the control input and computationalexpense increase. The efficacy of the algorithmis tested with respect to a quantization step of2, 4, 8, and 16 steps (Fig. 5(a)). Results suggestthat the decrease in phase recovery time may notoutweigh the increase in computation time. Thephase resetting dynamics of a control input with2 and 8 possible steps are investigated below.Similarly, the efficacy of the algorithm is testedwith respect to a control input of duration 1, 2,and 3 hours (reflecting a move horizon of 3, 6, and9-hours, respectively) (Fig. 5(b)). Results suggestthat although shorter light pulses offer a moredynamic manipulated variable profile, it shortensthe move horizon and may reduce the utility ofmodel predictive control. Conversely, while longerlight pulses offer a longer move horizon, it mayreduce the possible control profiles since longerlight pulses eventually lead to arrhythmic behavior (Ohta et al., 2005). In the remainder of thisstudy, the duration of control is set to 2 hours.4.4 ResultsThe nonlinear properties of biological oscillatorsoften cause different phase-resetting dynamicswith respect to the initial condition, IC, andinitial phase difference, IP. The initial conditiondescribes the time at which the organism settlesinto the new environment and begins entrainment;the initial phase difference describes the numberof time zones bypassed upon arrival. Hence, phaserecovery times are described as a function of boththe IC and IP.We generate phase recovery dynamics for threedifferent simulation schemes: (1) The open-loopalgorithm where environmental light/dark cyclesentrain the system, (2) the closed-loop MPC algorithm where the manipulated control variable(light) has two possible values, and (3) where themanipulated control variable has eight possiblevalues. Phase recovery times may be consolidatedinto a 3-dimensional diagram (Fig. 6) where therecovery times are plotted with respect to bothinitial phase differences and initial conditions.As such, we may better visualize the nonlineardynamic behavior of phase resetting. Although
32.520612182430360.060.042 steps42 484 steps8 steps16 stepsnominalRecovery Time [hr]State Trajectory [nM]Total Light InputIC 12 :: IP 8363024181260 12 90.02006121824303642 6 303Initial Phase [hr]486912(a) Control Input Quantization91821(a) 2-Step Closed-Loop ControlIC 18 :: IP 632.520612182430360.061hr pulse422hr 48pulse3hr pulsenominal0.040.0200612182430364248Time [hr](b) Duration of ControlFig. 5. (a) The recovery time associated with acontrol input that allows 2, 4, 8, and 16 possible values is 36.8, 35.6, 34.7, and 34.6-hours
the timekeeping abilities of the circadian clock, we employa systemsbiology approach.Mathematical models are used in two complementary investiga-tions, one involving the network of coupled oscil-lators, and the other involving the single coherent oscillator. In both cases we investigate the phase response behavior.