Transcription
KapitelnameE-BOOKSelf-drivingand cooperative carsOpportunities for safe,efficient, and sustainablemobility for everyonePerspectives,need for action and regulation1E-book: Self-driving and cooperative cars
Table of contentThe Author . 3IKEM Introduction . 4Introduction: Science-fiction meets the road. 5How have self-driving and cooperative cars developed in the past few years?. 6Current situation: Autonomous driving today. 7Background: What are vehicles with self-driving mode?. 9Autonomous means independent of a driver.11The level of automation doesn’t reveal everything.12Humans continue to take over responsibility in the system.15The technologies behind the autonomy.17Cooperative driving: From vehicle system to integrated overall system?.25Manual, automated, and self-driving mode. What does this mean?.29Self-driving mode needs its own regulations.36The Goal: More sustainable, safer, and efficient mobility for all. 39Opportunities for traffic and the job market.40The opportunities for sustainability.45The risks of data misuse and access opportunities.49In Conclusion: A new mobility landscape?. 50Outlook for private transport.52Prospects for commercial vehicles and company transport.532E-book: Self-driving and cooperative cars
The AuthorNext chapterAssessor jur. Matthias Hartwig is a fully qualifiedlawyer and has been a scientific advisor to theInstitute for Climate Protection, Energy andMobility (IKEM) since 2011. Leading the MobilityTeam since 2014, he also deals with the legalissues surrounding mobility. These include thefollowing areas: Energy industry, road, and traffic law Planning law Incentive and funding models in the area ofmobility Business legal framework for mobility (inparticular state aid, procurement, and antitrustlaw)Along with his team, he researches a varietyof projects relating to the legal, economic, andsocial issues revolving around motor vehicleswith automated or autonomous driving ok: Self-driving and cooperative cars
IKEM IntroductionNext chapterThe Institute for Climate Protection, Energy and Mobility(IKEM) is an independent, non-profit association andaffiliated institute of the Universität Greifswald. TheIKEM researches key scientific issues that focus onimplementing a sustainable and social order whilstusing an interdisciplinary and integrative internationalperspective. IKEM’s central research topics include: Expansion of renewable energy sources Energy grids that are fit for the future Electromobility Digitalization, automation, and the networking oftransport Related traffic and mobility issues Implementation of climate protection goals Basic issues of energy supply, planning, resourceconservation, and efficiencyYou can find an overview of IKEM’s projects, partners, andpublications at:www.ikem.de/en4E-book: Self-driving and cooperative cars
Introduction:Science-fiction meetsthe road5Next chapterE-book: Self-driving and cooperative cars
Introduction: Science-fiction meets the roadNext chapterHow have self-drivingand cooperative carsdeveloped in the past fewyears?Do you think of robotic cars as a science-fiction topic?Just a few years ago, many experts would have agreedwith you. However, times are changing. In 2004, the USDefense Advanced Research Projects Agency (DARPA)held its first competition in the Mojave Desert. The goal?For participants to develop a car with self-driving modes.The aim was to cover 150 miles within ten hours using aself-driving vehicle control system. The most successfulvehicle only managed about 7,3 miles.Since approximately 2011, several American technologycompanies have announced that their self-driving vehiclesare nearing market maturity. These companies claimedthat their vehicles successfully covered hundreds ofthousands of test kilometers with only minor interventionsfrom test drivers. Quite an achievement when comparedto the short 7.3 miles achieved in the Mojave Desertjust seven years prior. But where are the self-driving carstoday?6E-book: Self-driving and cooperative cars
Introduction: Science-fiction meets the roadNext chapterCurrent situation:Autonomous driving todayAlthough these announcements may have beenconsidered hasty and exaggerated in retrospect, thesecompanies gave the market an important boost. Cars withself-driving mode (also known as autonomous vehicles,robot cars, driverless, or self-driving motor vehicles)have since made their way to the forefront of mobilityresearch and are respectively hyped up by the media. Fora while there was some discussion predicting that robotcars would replace conventional cars and although thismay be the case in the future, the excitement has sincesubsided somewhat and has given way to a more realisticview for today’s world.Today, useful applications are already emerging leading tothe self-driving cars being able to handle a fair amount oftraffic situations on their own. However, almost all expertsagree that long-term human support will be needed incertain traffic situations, as well as in vehicle maintenanceand monitoring. In addition, self-driving mode cannot beused in all circumstances.7E-book: Self-driving and cooperative cars
Introduction: Science-fiction meets the roadNext chapter“Mixed traffic, in which vehicles of differentlevels of automation, cyclists, andpedestrians participate side by side, willcontinue to exist.”Matthias HartwigIf you think of cars with self-driving mode as science-fiction, you’ll be surprised to find out: Where this technology stands today Why vehicles with self-driving mode will be soon beused on the road Why we can make good use of them (as they cancontribute to sustainable, efficient mobility andcontribute to road safety) What remains to be done on the road in order toachieve sustainable, safe, and efficient mobility forvehicles with self-driving mode.8E-book: Self-driving and cooperative cars
Background:What are vehicles withself-driving mode?9Next chapterE-book: Self-driving and cooperative cars
Background: What are vehicles with self-driving mode?Next chapterOnce cars with self-driving mode are actively onthe road amongst our everyday traffic, there willno longer be a need for the conventional manualdrivers that we have today. Why? During thedriverless ride there is no need for the passengerto be responsible for the constant monitoring oftraffic or vehicle control elements in general. Thisis because the vehicle follows a program madeby a human but controlled from outside of thevehicle by an attendant who takes on some of thefunctions and responsibilities that beforehandlay with the driver. Technical tasks can also beperformed via digital environment systems thatthen form an integrated overall system with thevehicle. The Society of Automotive Engineers (SAEInternational) prefers the definition “cooperativedriving” for cars dependent on communication and/or cooperation with outside entities such as thosedescribed above. In other words, we (humans)can set vehicles self-driving mode into motionand thus have overall control of the vehicle, atleast by issuing commands that the vehicle thenautomatically implements.A person can also take the vehicle out of traffic at any time.It is also important and necessary that we humans performvarious functions in the maintenance and monitoring ofthe vehicle as well as being an accompaniment to thevehicle itself. Which functions and responsibilities lie withinthe vehicle system or the digital surrounding environmentsystem and which lie with us as humans can differ greatlyfrom system to system.10E-book: Self-driving and cooperative cars
KapitelnameAutonomous meansindependent of a driverAutonomous doesn’t mean self-governing, but ratherself-sufficient and independent of a driver. The term“autonomous” can be translated from Greek as either“self-governing” or “self-sufficient.” Vehicles with selfdriving mode do not drive in a “self-governing” fashionwhen in self-driving mode. They are directed by a codethat programmers use to pre-determine the vehicle’sresponse. The program – and not the driver – thusdetermines the reaction of the vehicle in self-drivingmode. Therefore, a more accurate translation would be“self-sufficient” in the sense that in most traffic situationsthe vehicle operates independently of human interventionand a driver does not need to constantly monitor ortake over the system. This does not rule out a humanswitching off self-driving mode and then controlling thevehicle manually.11E-book: Self-driving and cooperative cars
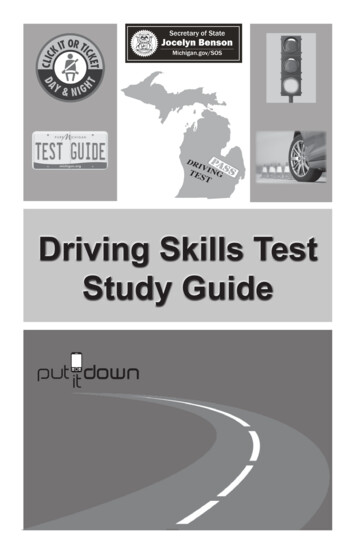
Background: What are vehicles with self-driving mode?Next chapterThe level of automationdoesn’t reveal everythingLevels of automation facilitate the classification of automatic driving modesof the vehicles. In order to assess their functions, however, a closer look at thedifferent systems is required.Automated vehicles have different levels of automation. The differentiation into thesestages allows for a better understanding and paves way for the possibility of discussion ofthese vehicles. Internationally, the Society of Automotive Engineers (SAE) classifies roadvehicles into six automation levels (SAE level 0-5).1125Full Automation4High Automation3Conditional Automation2Partial Automation1Driver Assistance0No AutomationE-book: Self-driving and cooperative cars
Background: What are vehicles with self-driving mode?Next chapterAutonomous vehicles (full automation) or vehicles with SAE level 5 would, according tothis definition, be vehicles that are operated full-time by an automated driving systemwithout any interference from a human driver.“Such vehicles will not exist for at least thenext 20 years.”Matthias HartwigLikewise, it is proving to be extremely difficult for current research projects to preciselyclassify vehicles designated as “autonomous” into SAE levels 3-5. Not just in researchprojects but also in everyday language and, for example, in the legal definitions of someAmerican States. Therefore, the term “autonomous vehicle” is much broader. This text willdiscuss “motor vehicles with self-driving mode.”13E-book: Self-driving and cooperative cars
Background: What are vehicles with self-driving mode?Next chapterWhat is self-driving mode?Self-driving mode is essentially dynamic drivingin specific roadway and environmental conditionswithout human intervention. It can only be activatedif the basic conditions are right.Using the SAE levels, motor vehicles withself-driving mode in this context would best beclassified as Level 4 (high automation). Whenself-driving mode is active, all aspects of thedynamic driving task under authorized roadwayand environmental conditions are managedautonomously (self-sufficiently) by the vehicle.If the vehicle stays within its intended range ofoperation, no driver will be necessary. However, theycannot work independently “under all roadway andenvironmental conditions” as demanded by SAELevel 5. Hence the self-driving mode will be limitedto specific roadway and environmental conditionsand might depend on communication and/orcooperation with outside entities (for this, SAEsuggested the definition of a cooperative ratherthan an autonomous vehicle). The system mighteven need to be monitored from outside the vehicleand with human technical back up in exceptionalsituations.14E-book: Self-driving and cooperative cars
Background: What are vehicles with self-driving mode?Next chapterHumans continue to takeover responsibility in thesystemAlthough self-driving mode can replace the driverafter its activation, it cannot replace all humans inthe system.If there is no driver for a vehicle, humans in other functionstake on some of the responsibility instead. In recentresearch projects – and everyday language – vehiclesreferred to as “autonomous” often have a safety driverwho intervenes in critical situations. In these vehicles,self-driving mode is still under development. Theconsequence of this is that the driver of such vehicleshas more responsibility than a conventional driver. Theauthorities that mandate the piloting companies requiresuch vehicles to have a fully attentive licensed driverwith special training behind the wheel at all times. Forexample, when issuing a “Testing Permit,” the New YorkState Department of Motor Vehicles states that “A personholding a valid driver license must be in the driver’s seatwhile a vehicle is operated on public highways.15E-book: Self-driving and cooperative cars
Background: What are vehicles with self-driving mode?Next chapterThat person must be prepared to take control whenrequired to in order to operate the vehicle safely andlawfully. Every test vehicle operator must be adequatelytrained in the safe operation of the test vehicle to ensureboth legal and safe operation.”2 In the US, there is novehicle currently available for sale that is self-driving.3Even if in the future, with no drivers in the vehicle and theauthorities not actively requiring one, there will be somesort of supervising vehicle attendant inside or outsideof the vehicle. At the same time, the monitoring andmaintenance staff at depots and in operating centers(or control centers) can play an important role. For along time to come, those responsible – either insideor outside the vehicle – must be available to performsafety checks on the vehicle before start-up, to activateand deactivate the self-driving mode, and to guaranteereliable functioning while it’s in operation. In exceptionalcases, it may even be necessary for an “emergencydriver” to take over operation on-site or remotely.Furthermore, the authorities expect the applicant fora vehicle permit to “submit with this application a lawenforcement interaction plan to inform law enforcementofficers and first responders how to safely interact withthe [ ] vehicle(s) in emergency and traffic enforcementsituations.”416E-book: Self-driving and cooperative cars
KapitelnameThe technologies behindthe autonomyFor a vehicle to move without driver intervention, it mustitself have a sufficient wealth of information. In orderto obtain this information and to provide this relevantinformation to the vehicle, various technical developmentsoutside the vehicle are required. The following table givesan overview of the technology that enables self-drivingmode, making it easier to understand what these vehiclescan do.17E-book: Self-driving and cooperative cars
Background: What are vehicles with self-driving mode?Next chapterInformationTechnologiesDriving order: The A human always determines the driving order. Thevehicle must “know”vehicle cannot decide “autonomously” where itwhich destination it isis going, the human must input the destinationexpected to drive to.themselves in some form or another (e.g. “Drive to thenext charging station”). The digitalization of communication can help here, forexample, apps and smartphones.Self-positioning: TheMost of today’s transport positioning systems use thevehicle must “know”satellite-based Global Positioning System (GPS).where it’s located.GPS guarantees accuracy of positioning with deviationsbelow eight meters. For self-driving mode, deviations of lessthan 5 cm may be required. This can be guaranteed by: Differential Global Positioning System (DGPS):Reference stations on the earth eliminate GPSinaccuracies. Landmark and marker orientation: If the systemuses its sensors (camera) to recognize prominentlandmarks whose position is stored in the system; theycan position themselves with them. Road markings(center line) are also gathered to aid orientation.18E-book: Self-driving and cooperative cars
Background: What are vehicles with self-driving mode?Next chapterInformationTechnologiesSelf-positioning: The “Virtual Rail” with Radio Frequencyvehicle must “know”Identification (RFID) or other processes: Smallwhere it’s located.chips or other electronic orientation aids are appliedin or on the road or in the road environment, whichcorresponding transmitter-receiver systems can detectelectromagnetically to use for self-positioning. If the speed and direction of travel of the vehicle areknown due to vehicle data, a position change can becalculated.Self-status detection:Many different sensors provide this information:The vehicle must know aOdometers, rotation rate sensors on the wheels,lot about its own status:gyrocompass, tire pressure sensors, door openingFunctioning of importantsensors, thermometer, etc.systems, direction oftravel, speed, door closing,indoor and outdoortemperature, etc.19E-book: Self-driving and cooperative cars
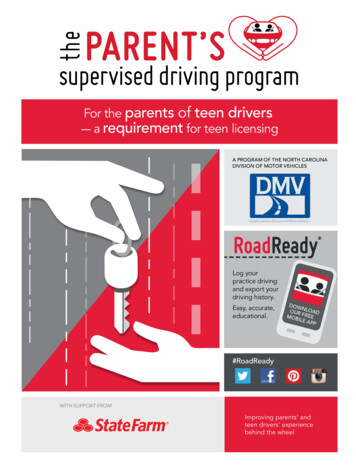
Background: What are vehicles with self-driving mode?Next chapterInformationTechnologiesRoadway and envi-From static geodata (map data), to static traffic elementsronmental conditions:(traffic signs, construction sites), to traffic light signals, theThe vehicle must “know”position of fog banks, traffic congestion, individual cars,how to reach its desti-bicycles, and pedestrians, a motor vehicle with self-drivingnation the fastest andmode must have an accurate picture of its surroundings.safest way.A “Local Dynamic Map” (LDM) stores the requiredTraffic situation: Thedata in the vehicle. Static information (e.g. map data) canvehicle needs the exactbe stored in the LDM in advance and compared with theposition of buildings andactual environment in test runs on the intended route.other fixed obstacles,However, data fed in this way requires constant updating.the current position, theThe LDM may obtain data from sensors on the vehicleoutline, the speed, anditself or from sensors or digital services outside the vehicle.the direction of move-( Illustration).ment of all road users inthe area (cars, bicycles,pedestrians), traffic signs,traffic lights, etc. Onlywith a precise picture ofthe traffic situation canit also take into accountall traffic regulations andavoid the endangermentof other road users. To satisfy the high demand for data, the vehicle mustbe networked with its environment. The followingserve as communication: Mobile communications: The large amountsof data can be handled better with a high mobilestandard. The currently much-discussed 5G mobilestandard seems particularly suitable here given itshigh data transmission rates, real-time transmission,and low latency. Wi-Fi: A wireless local area network (Wi-Fi) is beingbuilt by wireless modules on streetlights and signgantries to improve communication.20E-book: Self-driving and cooperative cars
Background: What are vehicles with self-driving mode?Next chapterInformationTechnologiesRoadway and envi- Sensors in the vehicle or on the roadside detect theronmental conditions:The vehicle must “know”how to reach its destination the fastest andsafest way.Traffic situation: Thevehicle needs the exactposition of buildings andother fixed obstacles,the current position, theoutline, the speed, andthe direction of movement of all road users inthe area (cars, bicycles,pedestrians), traffic signs,traffic lights, etc. Onlywith a precise picture ofthe traffic situation canit also take into accountall traffic regulations andavoid the endangermentof other road users.21traffic environment and situation: Digital camera: Cameras capture the environmentoptically, but may not detect everything (e.g. indarkness, fog, or backlight). Laser scanner/LIDAR: The distance and speedof objects can be measured by using many laserbeams. This allows for the creation of an accuratepicture of the environment. Radar and ultrasound sensors: Additionaldirectional and distance measurement technologiescomplement the range of perception of othersensors and provide redundancy so that nothing isoverlooked. Sensor data consolidation and evaluation:Different sensors and the images they have createdand the data they collected have various advantagesand disadvantages. Computers can use it to calculatea coherent picture that detects traffic much better thanjust one sensor. Regional digital map: Geodata and dynamictraffic data can be merged and refined in a vehicleindependent digital map. This data can be used by thevehicle.E-book: Self-driving and cooperative cars
Background: What are vehicles with self-driving mode?Next chapterInformationTechnologiesRoadway and envi- Sensor data from other vehicles (Vehicle-to-VehicleCommunication, V2V) can also be used, for exampleto supplement a regional digital map (e.g. trafficcongestion information from other vehicles).ronmental conditions:The vehicle must “know”how to reach its destination the fastest andsafest way.Traffic situation: Thevehicle needs the exactposition of buildings andother fixed obstacles,the current position, theoutline, the speed, andthe direction of move- Digital traffic signs: A camera cannot detect withsufficient reliability whether a traffic light is green or red.A digital radio signal from the traffic light can provideclarity in this case. Control technology: Brings together a large amountof data contained in an operator center in order tobe able to centrally monitor and maintain the vehicleand infrastructure and coordinate the necessaryinterventions from outside.ment of all road users inthe area (cars, bicycles,pedestrians), traffic signs,traffic lights, etc. Onlywith a precise picture ofthe traffic situation canit also take into accountall traffic regulations andavoid the endangermentof other road users.22E-book: Self-driving and cooperative cars
Background: What are vehicles with self-driving mode?Next chapterExample of a “Local Dynamic Map”VehiclePedestriansEgo vehicleType 4Slippery roadSignal phaseType 3Traffic congestionLandmarksType 2Traffic signMapType 1Type 1: Permanent static data (map data)Type 2: Transistent static data (roadside infrastructure)Type 3: Transient dynamic data (congestion, signal phase)Type 4: Highly dinamic data (vehicles pedestrians)23E-book: Self-driving and cooperative cars
Background: What are vehicles with self-driving mode?Next chapterPowerful computer programs and artificial intelligenceIn particular, the merging and evaluation of sensor data requires the use of powerfulcomputers and complex programs. In this case, artificial intelligence can also be used.What does artificial intelligence mean?Artificial intelligence describes the ability of acomputer program to extract logical correlations fromlarge amounts of information (pattern analysis andpattern recognition) to draw conclusions according tocertain rules (i.e. predicting patterns).These processes are often used in image recognition and image analysis. For example,if a computer program has already analyzed tens of thousands of images of differentmodels of cars, it will be able to identify a car as such even if it has not “seen” the specificmodel before. Accordingly, if the computer program has analyzed many vehicles turns,it can predict the course of a turning vehicle with certain probabilities. This ability is veryimportant for self-driving mode since the systems are better able to navigate in unknownsurroundings and constellations. Independent and ethically thought-out decisions,comparable to those of a human being, cannot be made by such systems. Therefore, theterm “artificial intelligence” may give rise to partially exaggerated expectations.24E-book: Self-driving and cooperative cars
KapitelnameCooperative driving: From vehicle systemto integrated overall system?The self-driving vehicle system of a car with self-driving mode may, in certaincircumstances, rely on digital surrounding environment systems (cooperative automation).5From a technical point of view, the vehicle system with digital surrounding environmentsystems can also be considered as an integrated overall system. This overall systemmust meet certain requirements to ensure optimum results for traffic safety and trafficflow. Autonomous driving (SAE: cooperative driving) requires a change of focus from thevehicle to an overall system because it will only achieve adequate performance in varioustraffic situations in close cooperation with digital surrounding environment systems. Forexample, when driving through traffic lights at a complicated intersection on-road sensorsand digital signals from the traffic lights themselves would be needed at a red light toensure safety and accuracy.We are accustomed to associating cars almost as a uniform or a distinct tool used by adriver. This distinction is common to all traffic and vehicle safety regulations in every country.In the US the National Traffic and Motor Vehicle Safety Act6 regulates motor vehicle safetyand mandates the application of the Federal motor vehicle standards7 regarding design,construction and performance of all motor vehicles.825E-book: Self-driving and cooperative cars
Background: What are vehicles with self-driving mode?Next chapterThen again the rules of the road are regulated by the Federal States and address the driveronly, who must control his tool and is responsible for every action of the vehicle itself. Ifthe driver in the vehicle becomes just a passenger, this division can no longer work. Carmanufacturers must comply with Federal Motor Vehicle Safety Standards and certify thattheir vehicle well aligned with safety features to avoid risks under all circumstances and inall driving modes. For motor vehicles with autonomous motion functions this includes toensure that they operate in compliance with the rules of the road.9The concept of the vehicle as a definable tool must also be questioned. Whether a vehiclewith self-driving mode can handle its driving task safely and smoothly will increasinglydepend on information originating from various digital surrounding environment systems(digital traffic signs, regional digital map, roadside sensors, etc.) (cooperative drivingsystems). The vehicle drives based upon its own digital map, which it continuously updateswith the help of information from outside. The vehicle is not always able to decide on itsown whether this data is reliable or not. It has to rely in part on the surrounding environmentsystem. The U.S. Department of Transportation states that cooperative automation willbe “an important complementary technology that is expected to enhance the benefits ofautomation at all levels, but should not be and realistically cannot be a precondition to thedeployment of automated vehicles.”10“I think that SAE Level 5 will remain adream for quite a long time, but SAE Level4 Technology V2V and V2X will be verybeneficial and more important than whatthe current discussion implies for themajority of valuable use cases.”Matthias Hartwig26E-book: Self-driving and cooperative cars
Background: What are vehicles with self-driving mode?Next chapterTraffic light example A vehicle cannot detect a conventional traffic light with acamera with enough reliability. It can only drive quickly at an intersection if it gets a digitaltraffic signal. However, this signal only has an added value if the trafficlight operator guarantees its reliability. The vehicle is thus increasingly cooperative with digitalsurrounding environment systems.Parking garage example A parking garage designed for self-driving valet parkingcould soon be possible using comprehensive data wherecameras and other sensors detect free parking spaces,vehicles, and pedestrians into a dynamic traffic map(technical surrounding environment system). Navigating becomes very easy for the motor vehicle inself-driving mode here. However, it must be able to relyon the given information. Not only does the vehicle haveto be safe, but the vehicle and surrounding environmentsystem must form a secure overall system to preventaccidents together. At a certain point, the question arises as to who is actuallyin control of the vehicle – the vehicle or the parkinggarage.27E-book: Self-driving and cooperative cars
Background: What are vehicles with self-driving mode?Next chapterThe vehicle and the surrounding environment system would technically form an overallsystem. Only if this overall system is safe and provides enough valid data for navigation willthe vehicle be able to safely navigate and run smoothly through traffic. In order to ensurethe identifiability of those responsible, there must be continual legal areas of responsibility.As a result, in the future it is likely that there will be system administrators for the vehiclewhom will monitor the various digital surrounding environment systems. Technically, asingle system in isolation would often lead to a dead end as the required amount of safetyprecautions along with the monitoring of traffic flow can only be provided when there isan interaction of all component
3 E-book: Self-driving and cooperative cars The Author Next chapter Assessor jur. Matthias Hartwig is a fully qualified lawyer and has been a scientific advisor to the Institute for Climate Protection, Energy and Mobility (IKEM) since 2011. Leading the Mobility Team since 2014, he also deals with the legal issues surrounding mobility.