Transcription
ECE 5463 (Spring 2018)Introduction to RoboticsCourse IntroductionWei ZhangAssociate ProfessorElectrical and Computer EngineeringOhio State University1
Course Information: Title: Introduction to Real Time Robotics Location: Smith Lab 1009 Time: 12:40pm ---1:35pm (M/W/F) Instructor: Wei Zhang, zhang.491@osu.edu Office Hours: 404 Dreese Labs, 1:40 – 2:40 M/F (tentative) Webpage: www.carmen.osuhttp://www2.ece.ohio-state.edu/ zhang/RoboticsClass/index.html2
Reference Books: Textbook (Required) : "Modern Robotics: Mechanics, Planning, andControl", Kevin M. Lynch and Frank C. Park, Cambridge UniversityPress, 2017, ISBN 9781107156302. "A Mathematical Introduction to Robotic Manipulation", Richard M.Murray, Zexiang Li, and S. Shankara Sastry, 1994 "Robot Modeling and Control", Mark W. Spong, Seth Hutchinson, andM. Vidyasagar, 2005 Grading Policy: Homework20% Programming Assignment 10% (group with 2 – 3 people) Final Project10% Midterm25% (in class) Final Exam35% (Tuesday, May 1st, 12:00pm-1:45pm)3
What is Robot? “Goal oriented machine that can sense, plan and act” A robot senses its environment and uses that information, togetherwith a goal, to plan some action. The action might be to move the tool of an arm-robot to grasp anobject or it might be to drive a mobile robot to some place4
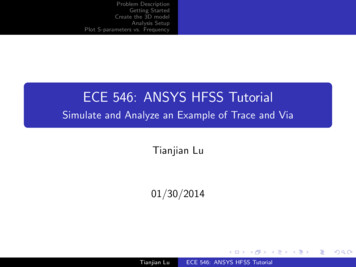
Robot Manipulators (Industrial Robots) Originally designed for industrial automation Four largest traditional robot manufacturersABBKUKAFUNUCYaskawa Many new players DobotMakerarmuArmhttps://www.youtube.com/watch?v rhN2U5JbTY05
Walking Robots 1976 – OSU Hexapod – McGhee 1984 – OSU ASV (Adaptive Suspension Vehicle) – Waldron & McGhee https://www.youtube.com/watch?time continue 71&v DIiD1JimBXQ Boston Dynamics https://www.youtube.com/watch?v fRj34o4hN4I Robot Cassie https://www.youtube.com/watch?v CVcfNBYBYqA6
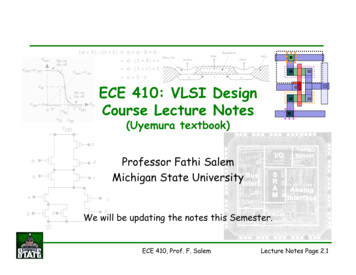
Other Robots Quadrotors: https://www.youtube.com/watch?v YQIMGV5vtd4 Cheetah https://www.youtube.com/watch?v luhn7TLfWU Flyboard: https://www.youtube.com/watch?v deyMNPbaRpA Kiva: https://www.youtube.com/watch?v urWtlOVhg 4AutonomousUnderwater VehicleiRobot RoombaHonda ASIMOAutonomous Vehicle7
Robotics Kinematics: How to describe possible motions of objects withoutconsidering mass and forces Dynamics: How to compute motion of objects given forces on theobjects Planning & Control: how to move objects in a desired manner underuncertainties Actuators: DC motors, Servo, Hydraulic, Pneumatic, motor drive Sensing and Perception: force, position, vision Actual building expertise: mechanical design, electronics,mechatronics Artificial Intelligence: high-level decision and learning8
This Class: Kinematics: How to describe possible motions of objects withoutconsidering mass and forces Dynamics: How to compute motion of objects given forces on theobjects Planning & Control: how to move objects in a desired manner underuncertainties Actuators: DC motors, Servo, Hydraulic, Pneumatic, motor drive Sensing and Perception: force, position, vision Actual building expertise: mechanical design, electronics,mechatronics Artificial Intelligence: high-level decision and learning9
Caveat: This course is not about how to actually build a robot To gain hands experience, you should take classes like embedded systems, mechatronics, mechanicaldesign, A lot of online/offline resources https://www.robotshop.com/ Robot Builder's Bonanza, 4th Edition My first time teaching a robotics class and our textbook is brandnew. This course is about the mathematical and algorithmicfoundation for advanced robot design and research A lot of math some physics Homework and project involves programming using python and RoboticOperating System (ROS) Mostly useful for graduate students who plan to do research on robotics10
Tentative Outline: Introduction and Background Configuration space Rotational Motions General Rigid Body Motions Velocities of Rigid Body Motions Forward Kinematics Velocity Kinematics and Statics Dynamics of open chains Trajectory generation Mobile robots Advance topics11
12
Robotics Kinematics: How to describe possible motions of objects without considering mass and forces Dynamics: How to compute motion of objects given forces on the objects Planning & Control: how to move objects in a desired manner under uncertainties Actuators: DC motors, Servo, Hydraulic, Pneumatic, mo