Transcription
ColaborativoSeguridadRobóticaNormas y directivas.Los robots colaborativos trabajan junto con los humanos, realizando tareas de trabajo repetitivas, con mayorfrecuencia en líneas de ensamblaje o en funciones de fabricación de CNC. A diferencia de los robots fijos, que estánprogramados para operar independientemente de la guía humana inmediata, los robots colaborativos pueden trabajarcon asistencia humana. Debido a que las personas pueden estar en contacto directo con este tipo de robots, ya seacon orientación o monitoreo, existen estándares de seguridad más estrictos que se aplican a su funcionamiento. Eneste documento, veremos los diversos tipos de operaciones y los estándares que los gobiernan.¿Qué es un robot colaborativo?Un robot colaborativo se define como una máquina diseñada para la interacción directa con un ser humano dentro deun espacio de trabajo colaborativo definido. Esto significa que un robot colaborativo tiene la capacidad de integrarseen un espacio de trabajo específico donde el sistema de robot puede realizar tareas al mismo tiempo durante laoperación al lado de un operador humano. Esto puede incluir tareas como asistencia de elevación, ensamblaje departes, inspección y empaque. Es importante tener en cuenta que, si bien un robot puede diseñarse para unaoperación colaborativa, eso no significa que simplemente se pueda instalar sin más consideraciones y sea seguro.Se deben usar estándares de seguridad para garantizar que la aplicación del robot sea también lo suficientementesegura. No presuma que se puede usar cualquier robot para la operación colaborativa: la aplicación determina siel sistema del robot puede ser colaborativo de forma segura.En la industria, estamos acostumbrados a grandes unidades robóticas que están protegidas pormuchos protectores fijos e interconectados, de modo que una persona no puede alcanzarun robot en movimiento, como en una línea de ensamblaje. Sin embargo, lasinnovaciones en software y diseño de robots colaborativos permiten a loshumanos interactuar con robots con protección limitada o sin protección.Para cada aplicación, la seguridad es siempre primordial.Para garantizar esto, el sistema robótico y su entorno debencumplir con ciertos niveles de seguridad antes de que puedaponerse en uso. Para garantizar la seguridad, la industria tieneuna serie de estándares aplicables.Los robots estarán en todas partes, porlo que la seguridad de los empleadoses primordial.El futuro de los robots colaborativos.Se predice que el mercado mundial de robotsindustriales crecerá un 11.5% anual y alcanzarálos 48.900 millones para el año 2021.De eso, se prevé que el mercado de robotscolaborativos se multiplique por diez enese tiempo a más de 1 mil millones. A medidaque se desarrolle la tecnología, los robots estaránmás seguros y al mismo tiempo podrán manejarUna gama más amplia de actividades. La industriarobótica colaborativa creará muchos trabajos yrealizará tareas peligrosas o repetitivas paraliberar a los trabajadores y concentrarse en otrastareas específicas para aumentar productividad.1
¿Quién es responsable de mantener a los empleados en una sola pieza?La respuesta es todos. El fabricante del robot debe asegurarse de que el robot cumpla con las normas yespecificaciones de seguridad aplicables. Mientras que el integrador de sistemas y el usuario final también debengarantizar la seguridad.¿Invertir en Robots?Considere esto para mantener seguros a sus empleados:Cuando se busca un robot colaborativo, es imperativo considerarla aplicación de uso final. La seguridad debe ser de sumaimportancia. El hecho de que un robot está diseñado para laoperación de colaboración no significa que es seguro para su usoen todas las aplicaciones. Se debe considerar el uso final y losmodos específicos de operación colaborativa. El robot debecumplir con las normas de seguridad aplicables y debe tener ladocumentación adecuada como prueba, especialmente en lo querespecta a la seguridad funcional.OK, entonces, ¿qué normas de seguridad y directivas son aplicables al producto?ANSI/RIA R 15.06CAN/CSA Z434Robots industrialesy sistemas derobotsRequerimientos deseguridadDentro de Europa, tanto los robots como las células robóticasdeben cumplir con la Directiva sobre maquinaria (2006/42 / EC).Para demostrar el cumplimiento de la Directiva sobre máquinas,se pueden aplicar los siguientes estándares.Requisitos de seguridadpara robots industriales,EN/ISO 10218-1EN/ISO 10218-2Robots ydispositivosrobóticosParte 1: RobotsRequisitos de seguridadpara robots industriales,Parte 2: Sistemas derobot e integraciónRobotscolaborativosISO/TS 150662
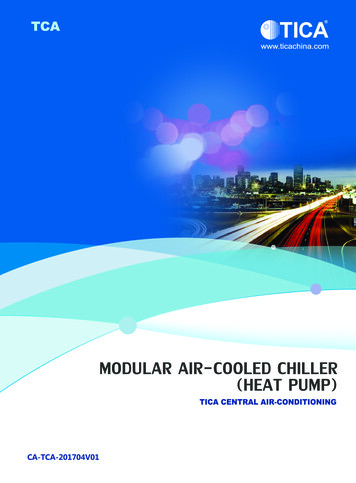
¿Cuáles son los cuatro tipos de operación robótica colaborativa?conA menudo se utiliza en situaciones en lasque el robot es comúnmente la realizaciónde tareas por sí solo, pero de vez encuando una persona puede necesitar paraentrar en el espacio de trabajo para cargaro descargar material.Mientras la persona se encuentra dentro del área de trabajo, el robotse encuentra en una condición de detención e incapaz de moversehasta que la persona ya no se encuentre dentro del área de trabajo.La tabla de verdad a la derecha muestra las diferentes situacionespara una parada monitoreada de seguridad.Robot Motion ofunción de paradaProximidad del operador alespacio de trabajo colaborativoAfueraAdentrocontinuocontinuoAdentroy moviendocontinuoParadaprotectoraDentro de inuocontinuoAfueraLa proximidad del robotal espacio de trabajocolaborativo1. Paradasupervisadaclasificación de seguridad.2. Guía de mano.Este tipo de operación le permite al ser humano guiar al robot auna velocidad monitoreada de seguridad y monitoreada. Estose utiliza a menudo para operaciones de enseñanza o donde laergonomía es un problema, como una ayuda de elevación. Paraesta operación, el robot debe estar equipado con una parada deemergencia y un dispositivo de habilitación.3. Control de velocidad y separación.El método reduce el riesgo al mantener una distancia suficiente entre untrabajador y un robot en el espacio de trabajo colaborativo. Esto se hacesupervisando la distancia de un robot con respecto a un ser humano y suvelocidad, típicamente a través del uso de una periferia clasificada comosegura, como un sistema de cámara. Si se viola la distancia de separaciónde velocidad, el robot se detendrá. Es importante que se tenga en cuentala distancia de frenado al calcular la distancia de separación.4. Limitación de potencia y fuerza por diseño o control inherente.Este método reduce el riesgo al limitar la velocidad y la fuerza de un robot. Esto sehace por diseño inherente o por el uso de un controlador de seguridad nominal.Esto es una gran desviación de muchos métodos de pensamiento porque reconoceque el contacto entre un robot en movimiento y el operador puede ocurririntencionalmente o no. Esto se logra a menudo usando baja inercia, geometría ymateriales adecuados. ISO / TS 15066 contiene pautas específicas de la verdad conrespecto a los criterios de límite en la carga mecánica para el contacto transitorio y elcontacto cuasi estático.3
Importancia y responsabilidad de laevaluación de riesgos de robotscolaborativos.Esto significa en particular:Una evaluación de riesgos es un proceso iterativo donde unfabricante debe determinar los límites de una máquina,identificar los riesgos, estimar el riesgo para cada riesgo,evaluar el riesgo y finalmente eliminar el peligro o reducir elriesgo mediante medidas de protección. Si bien muchospeligros no se pueden eliminar por completo, el objetivofinal de una evaluación de riesgos es llegar a un nivel deriesgo aceptable para cada peligro. El término aceptablegeneralmente se interpreta en la categoría baja oinsignificante de ISO 12100. Sin embargo, ciertas normasde seguridad o requisitos del fabricante pueden dictar locontrario.Todos los estándares mencionados anteriormente requierenuna evaluación de riesgos. La evaluación de riesgos,realizada de acuerdo con las especificaciones de ISO 12100,se utiliza para determinar una serie de requisitos dentro delos estándares, desde el funcionamiento de los circuitos deseguridad hasta la distancia de parada permitida de unrobot hasta la velocidad permitida de un brazo robótico. Un solo fallo en cualquiera de estas partes noconduce a la pérdida de la función de seguridad. Siempre que sea razonablemente posible, la fallaúnica se detectará en la siguiente demanda oantes de la función de seguridad. Cuando se produce una sola falla, la función deseguridad siempre se lleva a cabo y se debemantener un estado seguro hasta que se corrija lafalla detectada. Se detectarán todas las fallas razonablementeprevisiblesLo que esto significa es que cada dispositivo en la cadena deun sistema de control de seguridad se debe evaluar porseparado con respecto a la seguridad funcional (ISO 138491, IEC 62061). Esta evaluación debe ser realizada por unaagencia de pruebas calificada. Afirmar que un controlador derobot cumple con PLd o SIL 2 sin evidencia no es suficiente.La pregunta de quién es responsable de la evaluación esinteresante: no hay una respuesta definitiva. Sin embargo,no hay duda de que se debe realizar una evaluación para lainstalación final. Los sistemas robóticos requieren unaevaluación inicial del propio robot por parte del fabricantedel robot. Una vez que el robot se instala en un sistema ocelda robótica, se realiza una segunda evaluación. Estopuede hacerlo el integrador del sistema, el usuario final, elfabricante del robot o una colaboración entre muchosgrupos. Al final, el empleador que usa el sistema robótico esresponsable de la salud y el bienestar de los empleados.ISO 13849-1: El estándar de seguridad para "partesde sistemas de control relacionadas con la seguridad"IEC 62061: El estándar de seguridad para "Seguridadfuncional de los sistemas de control electrónicoseléctricos, electrónicos y programables relacionados conla seguridad"La importancia de la seguridad funcional.Revisión de la nueva norma ISO / TS 15066.El término "clasificación de seguridad" en las normas deseguridad robótica se utiliza en referencia a un sistema decontrol destinado a proteger a los empleados u otrosoperadores de robots de los peligros asociados con unainstalación en particular.ISO / TS 15066 fue lanzado recientemente y está diseñadopara complementar los requisitos y proporcionar orientaciónsobre el funcionamiento del robot colaborativo como se defineen ISO 10218. Cabe señalar que actualmente ISO / TS 15066se señala como una Especificación técnica y no como unestándar. Este es un reconocimiento de que el estado del artese está desarrollando de tal manera que habrá muchasadiciones a la especificación en el futuro. Sin embargo, huboun entendimiento de que la comunidad necesitaba requisitosutilizables a medida que la industria se desarrolla. Debido aesto, el uso de ISO / TS 15066 no es un requisito. Sinembargo, dado que este documento contiene el resultado demuchos años de investigación, es muy recomendable que seaplique.Estos sistemas de control pueden incluir cámaras conclasificación de seguridad, funciones de baja velocidadnominales de seguridad, interbloqueos con clasificación deseguridad, y más. ISO 10218 describe lo que "calificaciónde seguridad" significa:Las partes de los sistemas de control relacionadas con laseguridad se deben diseñar de modo que cumplan con PL d(Nivel de rendimiento "d" o 4to nivel); con una estructurade categoría 3 como se describe en ISO 13849-1: 2006; opara que cumplan con SIL 2 (Nivel de Integridad deSeguridad 2) con una tolerancia de falla de hardware de 1con un intervalo de prueba de prueba de no menos de 20años como se describe en IEC 62061: 2005.4
Este estándar proporciona pautas para el diseño e implementación de un espacio de trabajocolaborativo para controlar el riesgo. Si bien el estándar tiene muchos beneficios, el mayorcambio de juego dentro del estándar es la introducción de los datos del nivel de inicio deldolor.Los datos son el resultado de una gran cantidad de investigaciones realizadaspor la Universidad de Mainzen Alemania en nombre del comité de ISO.Esta información se utiliza para desarrollar pautas específicas conrespecto a los criterios de límite en la carga mecánica para elcontacto transitorio y el contacto cuasi estático.Deben tomarse medidas cuasi estáticas para verificar que lasfuerzas y las presiones de contacto están por debajo de losvalores límite.Los valores transitorios se utilizan para determinar lavelocidad máxima que un robot puede mover.Esto se basa en la masa del robot, la fuerza / presiónmáxima y la constante de resorte de la parteespecífica del cuerpo en la colisión.TUV Rheinland posee amplios conocimientos y experienciapara realizar evaluaciones de riesgos y evaluaciones decircuitos de seguridad. Podemos proporcionar capacitación oapoyo a nuestros clientes en prácticamente cualquierindustria o aplicación y realizar evaluaciones de máquinaspara mercados europeos o nacionales.TUV Rheinland se compromete a satisfacer las necesidadesde nuestros clientes. Nuestros informes se pueden utilizardirectamente en el proceso de marcado CE (archivotécnico), y nuestros servicios de certificación son bienconocidos y aceptados en toda la industria, debido a lacalidad del servicio y la reputación en todo el mundo.ventas@mex.tuv.com (55) 8503-9940 www.tuv.com/mex5
Las partes de los sistemas de control relacionadas con la seguridad se deben diseñar de modo que cumplan con PL d (Nivel de rendimiento "d" o 4to nivel); con una estructura de categoría 3 como se describe en ISO 13849-1: 2006; o para que cumplan con SIL 2 (Nivel de Integridad de Seguridad 2) con una tolerancia de falla de hardware de 1



![[ Modulo 9. Seguridad en Bases de Datos ] La seguridad en una base de .](/img/43/seguridad-bases-de-datos-diplomado-abd.jpg)