Transcription
ARDUINO BASED AUTOMATION IN THE SOILLESS AGRICULTUREMUSTAFA YILMAZDepartment of Electrical Electronics Engineering, Karabük University, TurkeyE-mail: mustafayilmaz@karabuk.edu.trAbstract—In this study, greenhouse automation was performed in a hydroponic environment using Arduino. The temperatureof water, EC (electrical conductivity) value of the nutrient solution in the hydroponic environment, which are the parametersthat affect the development process of plants from their planting into the stand in the created greenhouse environment up to thetime of collecting the products, were kept under control. Regarding these parameters, while the temperature of thewater waschanged by the aquarium heater, the EC (electrical conductivity) value in the hydroponic environment was set by means ofautomation by proportioning the nutrient kits.In this application performed, it was aimed to change farmer's perspective onmodern agriculture and accelerate the economic and agricultural development by contributing to the spread of modernagriculture.Index Terms—Arduino, soilless agriculture, greenhouse automation, EC.I. INTRODUCTIONII. GREENHOUSEAccording to the data of the Turkish StatisticalInstitute (TSI), the total population of our countryreached 78741053 people in 2015 and this number isstill increasing [1]. Due to the increase in the need forfood along with the country's population, agriculturalproduction should be higher in parallel to it.The closed areas where suitable environments for cropgrowing are created along with the monitoring ofclimatic environmental conditions are called agreenhouse [2]. Greenhouses used in greenhousecultivation, also known as greenhouse growing, varyby the materials used in their structure. Since ourcountry is located in the mild temperate zone,greenhouse cultivation has developed depending onnatural conditions, and it is mostly performed in theMediterranean region. Greenhouses are considered asmore favorable areas for air conditioning since theyare the areas independent of the external factors.The developments that have occurred in theagricultural sector along with the technologicalprogress increase the quality and quantity of theproduct in greenhouses where greenhouse growing isperformed, and also, they provide many benefits forproducers by decreasing the workload and harvestingtime. Different factors (weeds, insects, harmfulwastes, etc.) that may damage the product areencountered since the products are in soil in thetraditional agriculture.In this case, product losses areinevitable and agricultural producers have to usechemical drugs to get rid of these problems. In themodern agriculture, they will get rid of the harmfulformations from the soil as the plant is in a place whichis completely independent of the soil environment.Furthermore, the ecological balance will not bedeteriorated due to the products which are not exposedto chemical disinfection. The increasing population'sfood needs are met more easily and the country'seconomy is also improving by means of the modernagricultural practices. In these new applications,agriculture has been accelerated by the electroniccontrol system and automation. Automation is widelyused in soilless agriculture.A. Greenhouse AutomationGreenhouse automation consists of two parts ashardware and software. The hardware part iscomposed of a computer, a system with PLC(programmable logic control) or a system with amicrocontroller (Arduino, PIC, etc.) or a controlsystem consisting of the combination of them, andoutput units (relay, contactor, etc.) controlled by them.The sensors used to perceive the physical changescontrolled in the environment act like the sense organof the system. The software part performs thedecision-making function by fulfilling the tasks ofcontrolling the existing hardware and receiving data[3].B. Soilless AgricultureSoilless agriculture is the technique of growingproducts in another area without using the soil. Inother words, the difference of agriculture in the waterfrom the greenhouse system in the soil is that growthof the plant can also be controlled. The braking systemof the plant can be removed by this method used.Abnormal growth can occur in the plant as this processis not performed in the greenhouse with soil. Anotheradvantage compared to the production in the field isthe fact that plants are made free from otherenvironmental conditions, atmospheric effects. Thecommercial spread of the technique dates back to the1970s [4]. It is possible to grow many differentIn this study, an Arduino microcontroller was chosenas the control element. The temperature of the runningwater in the hydroponic environment, PH value,circulation of the running water and EC (electricalconductivity) variable of the system wereautomatically controlled, and the suitable environmentrequired for the development of the product wasprovided due to Arduino.Proceedings of 65th ISERD International Conference, Mecca, Saudi Arabia, 23rd-24th January 2017, ISBN: 978-93-86291-92-951
Arduino Based Automation in the Soilless Agricultureproducts using this technique. The developments insoilless agriculture indicate that its popularity willfurther increase in the future.An example of a soilless agriculture application is seenin Figure 2.1.downloading printed circuits and can take theready-printed and components with a stylish look asembedded [7].While Arduino can be used to develop interactivesystems that can run on their own, it can also runtogether with the software running on the computer byestablishing contact[8].Ready-made cards can be purchased or informationabout hardware design is available for those who wishto produce them. The microprocessor (AtmegaXX) onthe Arduino development card is programmed usingArduino programming language (wiring based) andthe program is installed to the card by using theProcessing based Arduino Software DevelopmentEnvironment (IDE) [7].Figure 2.1. Soilless Agriculture Application [5].Some of the advantages of soilless agriculture are asfollows; The labor force required to grow crops decreasesin soilless agriculture. Plants can be grown by performing soillessagriculture even in areas with unfavorable soils. The amount of expenditures spent on growingcrops is not high. Soilless agriculture is more suitable forautomation system compared to normalagriculture. Products are systematically fed by means ofautomation in soilless agriculture. Water saving is provided by minimizing the waterloss in greenhouse systems. There is not any danger of insects and weedproblem in the products. With this modern agriculture, the quality of thecrop increases and more harvest opportunities areprovided. Products are cleaner than the crops in thetraditional agriculture during the harvest season. The fallowing method is not used as it is notnecessary to be dependent on the soil to grow thecrop. In addition, crop planting can be performedagain after harvesting [6].The tendency to landless agricultural is expected toincrease because of these advantages.Figure 3.1. Arduino Leonardo [9].There are many different Arduino platforms on themarket to be appropriate to the status of the system tobe controlled and to be able to meet different needs[10].With Arduino, many different operations can beperformed as follows [11]; New projects can be designed easily byinteracting with the environment. It can be developed as required by users since it isan open source code development device. It is a device with the capacity to process analogand digital input signals as data. Since the sensors can be connected to thisplatform, the data from these sensors can be used. The programming of Arduino's libraries andmicrocontrollers is very easy. Outputs (sound, light, motion, etc.) can beproduced to the external world.The programming interface is used in its connection tothe computer to program the Arduino card. Somecards contain embedded USB jacks, so all you need todo is connect the USB cable to the computer. Somecards have headers. Therefore, the only thing to do isto connect the FTDI Basic breakout or FTDIcable.Cards like Arduino Mini are available for serialpin programming but are not compatible with FTDIheaders. Each Arduino with embedded USB jack hassome different hardware for USB conversions. Inaddition, some cards do not need additional hardwarebecause microprocessors have embedded USB support[12].III. ARDUINOArduino is a flexible, easy-to-use hardware andsoftware-based physical programming platform whichwas developed by Italian electronics engineers fromthe development environment, that contains aninput-output card and an application of processing /wiring language, as open source software, and inwhich everybody who wants can print their circuits byProceedings of 65th ISERD International Conference, Mecca, Saudi Arabia, 23rd-24th January 2017, ISBN: 978-93-86291-92-952
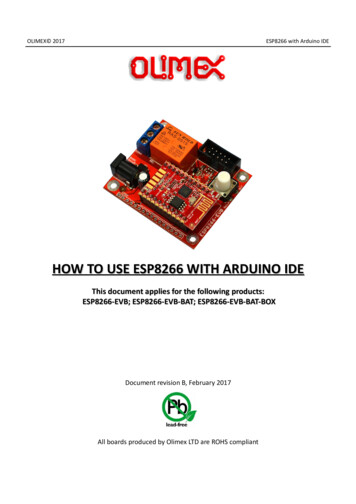
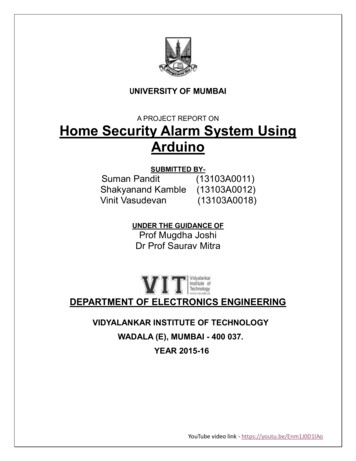
Arduino Based Automation in the Soilless AgricultureArduino Nano was used for the control of the systemin this study. Arduino Nano is a small, usefulbreadboard-friendly Arduino card containingATmega328 microcontroller (Arduino Nano version3.x) or Atmega168 (Arduino Nano version 2.x)microcontroller. Arduino has almost the same featureswith Duemilanove. Arduino Nano has been designedand used by Gravitech [13].The front and back sides ofArduino Nano V3 are presented in Figure 3.1.B. DS1302 RTC ModuleDS1302is the real time clock and battery-backedRAM (Random Access Memory) module produced bymaxim integrated company. The DS1302 modulecontains a real-time clock/calendar and 31-byte staticRAM. It contains real-time information. DS1302integrated RTC sensitively provides the requiredtimings by externally connected 32.768 kHz crystal. Inaddition, since DS1302 is powered externally, itcontinues to run within itself even if the energy of thesystem in which it is used is disconnected, and it keepstime/date and RAM information in its memory. TheDS1302 integration uses simple synchronouscommunication to communicate [15].Figure 3.1. Front and back sides of Arduino Nano [13].IV. APPLICATIONThe flow chart regarding the measurement and controlfor the automation of soilless agriculture in thegreenhouse with Arduino is given in Figure 4.1.Figure 4.3. DS1302 RTC ModuleC. Power SupplyThe basic task of the DC power source is to convert220V 50Hz alternating voltage or current in the gridinto constant DC voltage and current. Power sourcesare a unit used in almost all electronic devices. A basicpower source generally consists of a rectifier, filter,and regulator [16]- [17].12 Volt 5-Ampere Power source was used to feed themain circuit in the project.Figure 4.1. Flow Chart of the SystemA. DS18B20 Temperature SensorThis sensor is a water-proof type of DS18B20 sensorwhich is used to measure the temperature of theenvironment, and it was used to measure thetemperature of the main tank in the project.Since thesensor is digital, the temperature can be measured atdeep distances by its cable. There is also no corruptionin the data transfer. It can be configured via asinglecable (1-wire), and 9 or 12-bit reading can beperformed. The temperature measurement of theequipment, machines, and liquid pools in variousplaces can be performed sensitively with this sensor[14].Figure 4.4. Power supplyFigure 4.2. DS18B20 temperature sensorD. 8-Channel 5 Volt Relay CardIt is a relay card that can control contacts with 5 V andcan be used with Arduino or other microcontrollers. Itdraws a current of 20mA during the triggering of themicrocontroller. It is an electronic card circuit which isfrequently used in various industrial and roboticsprojects. It can switch the current up to 10 Ampere at30 V DC or 220 V AC voltage. There are control ledsfor each relay. The relays are active with logic 0(0V)[18].Proceedings of 65th ISERD International Conference, Mecca, Saudi Arabia, 23rd-24th January 2017, ISBN: 978-93-86291-92-953
Arduino Based Automation in the Soilless AgricultureFigure 4.8. Aquarium resistanceV. EXPERIMENTAL STUDIESFigure 4.5. Relay cardA. Temperature ControlThe DS18B20 temperature sensor was selected in thetemperature control, which is shown as one of theparameters required for the system to operate properly.The purpose of selecting this sensor is the fact that ithas high data accuracy and it can reflect accurateresults to the screen without being affected by theliquid medium consisting of water in the main tankand nutrient solution.E. LCD Screen6 legs are used under normal conditions forcommunication with 16x2 LCD Arduino kit. It wasused with the one that converts 6 legs into 2 legs anduses the I2C module to provide savings from 6 legsused. This LCD Module is used to monitor the dataobtained in the project from the external environment.The LCD screen connected to the I2C module ispresented in Figure 4.6.The average temperature value should be 15.5-18.3 ºCin our system [19].For this reason, if the temperaturefalls below the desired value at the temperature fromthe DS18B20 temperature sensor in Arduino software,the relevant output pin in Arduino will switch to theopen position, activate the relevant contact on therelay card and run the aquarium resistance which isconnected to the contact. The liquid mixture in themain tank will be heated to the desired temperature bymeans of the running aquarium resistance. When themixture in the main tank reaches the desiredtemperature, Arduino will deactivate the relevantoutput pin when the temperature sensor detects it andexchange data with Arduino. As a result, the resistancewill be disabled.Figure 4.6. LCD Screen connected to the I2C ModuleF. Water Pump and DC MotorThese motors fed with 12 Volt DC voltage were usedto pump the nutrient solution to the main tank in thesystem. The water pump motor was placed in the maintank and used to provide the circulation of the waterpassing through the pipes where the products standingon the stand are located and the mixed nutrientsolution. Both motors run at certain times of the daydepending on the time.B. DS1302 ConnectionSince the project is a time-driven study, a time modulesuch as DS1302 was preferred and the time problemwas resolved.The time study in the project is as follows; all data willbe reflected on the screen at the beginning of thesystem. Then, the main motor will run. The mainmotor will run for 8 hours a day. Furthermore, it willrun for a short time at the first system startup in ournutrient kits and it will continue to run by increasingthe time in weekly periods. Thus, the system willcontinue to operate at a regular periodic time. As aresult of these periodic time processes, the yield of ourplants grown in the running water culture is alsoexpected to be high.Figure 4.7. DC motor and water pump motorC. EC AlgorithmEC is the name of Electrical Conductivity in English,namely the abbreviation composed of the initials of thewords of electrical conductivity. Its unit is mS/cm[20]. The density of the fertilizer mixed with watercirculating in the system can be adjusted by checkingthe level of electrical conductivity.The EC values ofthe plants are presented in Table 5.1.G. Aquarium ResistanceIn this study, aquarium resistance was used to bringthe nutrient solution in the main tank to the desiredoptimum temperature actively according to thetemperature parameter.Proceedings of 65th ISERD International Conference, Mecca, Saudi Arabia, 23rd-24th January 2017, ISBN: 978-93-86291-92-954
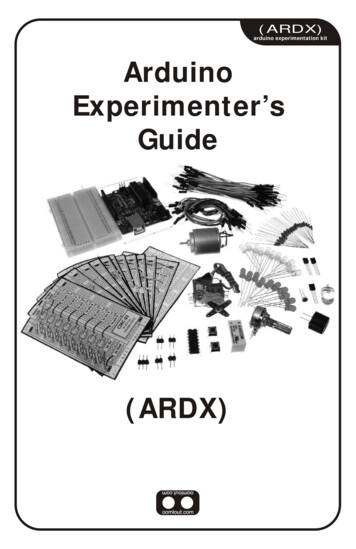
Arduino Based Automation in the Soilless AgricultureTable 5.1. EC values of various plantsIn this study, the lettuce plant was preferred by theproduct selection. In our EC algorithm applied, 0.8 ECvalue was selected as the beginning, and our 1.1 ECvalue was selected as the last EC value. The systemoperates with an average of 40 liters of water. Bymeans of the table given below, in what time thenutrient solution will be pumped into the watercirculating in the main tank to bring our EC value tothe desired level is seen.Figure 5.1. Stand imageIn the project, the lettuce plant with growthcharacteristics in all seasons was selected as the crop.The lettuces were placed in pre-drilled plastic cups atcertain intervals. The pearlite substance, which iscommonly used in soilless agriculture, was used toensure that lettuces stood upright. Then, the plasticcups into which lettuce and pearlite were put wereplaced on the stand. The image of the crop planted onthe stand is presented in Figure 5.2.Table 5.2. Amounts of the nutrient solution required for lettuceWhen the table is used, fluid fertilizers of 300 CC for0.80 EC, 338 CC for 0.90 EC, 375 CC for 1.00 EC and413 CC for 1,10 EC from A and B pots were mixedwith the water circulating in the main tank by means ofDC motors during the first planting for a 40-litersystem. Thus, the nutrient density was adjusted bytransferring the amounts of the nutrient solutionmentioned above into the main tank to achieve theseEC values over weekly periods. The optimization ofthe fertilizer density was ensured by running DCmotors for 10, 12, 14, 16 seconds at weekly intervalsto transfer the above CC amounts to the main tank.Figure 5.2. The Crop Planted on the StandThe development of the crop in the first, second andthird weeks is presented in the following figures.D. Project’s Stand and Crop PlantingIn this study, the stand on which the plants will beplaced generally consists of iron profiles and punch kitand various pipes drilled at 15 cm intervals. The standis presented in Figure 5.1.Figure 5.3. Image of the crop at the end of the first weekProceedings of 65th ISERD International Conference, Mecca, Saudi Arabia, 23rd-24th January 2017, ISBN: 978-93-86291-92-955
Arduino Based Automation in the Soilless Agriculturetechnique application, the harvest time of the plantedcrop was realized in a short time of 21 days. Thequality of the crop also increased.The change of the farmer's viewpoint on modernagriculture is obvious along with the advantages wehave mentioned above, thus, economic andagricultural development is predicted along with thefarmer's transition to the modern agricultural sector.A PH sensor can be added to the system in subsequentstudies. Thus, the control of the specific PH ratio canbe achieved and more efficient and quality crops canbe obtained.REFERENCESFigure 5.4. Image of the crop at the end of the second week[1][2][3][4][5][6]Figure 5.5. Image of the crop at the end of the third week[7]CONCLUSION AND SUGGESTIONS[8]In this study, we aimed to proceed to the modernagriculture by combining the traditional sense ofagriculture with technology. In line with this purpose,the plant growing in the hydroponic (running waterculture) environment which is common abroad wasapplied in our system. This application was performedin two stages.[9][10]The first stage consists of stand construction, fertilizerselection, and plant selection. Lettuce which is a plantgrowing all seasons was selected during the plantselection. During the fertilizer selection, the followingnutrient solutions in plants were selected: CalciumNitrate, Ammonium Nitrate, Potassium Nitrate, MKP,Potassium Sulphate. We used Magnesium SulphateBoron, Zinc, Sodium Molybdate, Manganese, Copper,Molybdenum mixture. The stand consists of ironprofiles and various PVC pipes.[11][12][13][14][15]The second stage is the automation part. In the systemestablished, parameters such as temperature, ECvariable and time dependent motor control werestudied. The evaluated parameters were kept undercontrol. As a result of our modern agricultural[16]Web: Türkiye İstatistik Kurumu (TÜİK) web ?id 245622016.Tüzel,Y., Gül, A., Daşgan, H.Y., Öztekin, G.B.,Engindeniz, S., Boyacı, H.F., Ersoy, A., Tepe, A.,Uğur, A.2010. “ Örtü altı Yetiştiriciliğinin Gelişimi. ” TMMOBZiraat Mühendisleri Odası Türkiye Ziraat MühendisliğiVII. Teknik Kongresi Bildiriler Kitabı: 559-576, 11-15Ankara , Ocak 2010.Ciğer, M., “Bilgisayar Kontrollü, İnternet Destekli SeraOtomasyonu”, Yüksek Lisans Tezi, Çukurova ÜniversitesiFen Bilimleri Enstitüsü, Adana, 2010.Van Os, E., Gieling, T.H, Lieth, J.H., “TechnicalEquipment in Soilless Production Systems” in Raviv, M.,Lieth, J.H. (Eds.), Soilless Culture: Theory and Practice.Elsevier, 157-209., Amsterdam, The Netherlands, r/2010/01/marul-yemegi-tire-usulu.html html 2016.Web: Anonim http://arduino.nedir.com Erişim Tarihi 19Kasım 2016.Al-Busaidi A. M.,“Development of an educationalenvironment for online control of a biped robot usingMATLAB and Arduino”, 13th International WorkshopMechatronics (MECATRONICS), 9th France-Japan & 7thEurope-Asia Congress on and Research and Education inMechatronics (REM), 337 - 344, Sump ca Paris, Paris,France, 21-23 November ducts dir/2016.Web: Anonymous 2013 Roboweb.net Web lim-kilavuzu/2016.Web: Anonymous Robotiksistem.com Web Sitesi;http://www.robotiksistem.com/arduino nano ozellikleri.html irmez-ds18b20-dijital-isi-sensoru animi-uygulamalari/ 2016.Kızılbey O. “Deniz Suyu Termometresi” Bitirme ödeviSayfa3,web.itu.edu.tr/ cilesiz/professional/kizilbey-bitirme.pdfMayıs 2005.Proceedings of 65th ISERD International Conference, Mecca, Saudi Arabia, 23rd-24th January 2017, ISBN: 978-93-86291-92-956
Arduino Based Automation in the Soilless Agriculture[17] -regulatoru/ (2016)[18] n.com/8-way-5v-relay-module-8li-5v-role-karti 2016.[19] aYetistiriciligi.html 2016.[20] m.gen.tr/ayteknik/ecveph.htm 2016. Proceedings of 65th ISERD International Conference, Mecca, Saudi Arabia, 23rd-24th January 2017, ISBN: 978-93-86291-92-957
Arduino Nano was used for the control of the system in this study. Arduino Nano is a small, useful breadboard-friendly Arduino card containing ATmega328 microcontroller (Arduino Nano version 3.x) or Atmega168 (Arduino Nano version 2.x) microcontroller. Arduino has almost the same features with Duemilanove. Arduino Nano has been designed