Transcription
A Crowd Simulation Using Individual-KnowledgeMerge based Path Construction and SmoothedParticle HydrodynamicsWeerawat TantisiriwatArisara SumleeonPizzanu KanongchaiyosDept. of Computer EngineeringFaculty of EngineeringChulalongkorn UniversityBangkok 10330, THAILAND.Dept. of Computer EngineeringFaculty of EngineeringChulalongkorn UniversityBangkok 10330, THAILAND.Dept. of Computer EngineeringFaculty of EngineeringChulalongkorn UniversityBangkok 10330, zzanu@cp.eng.chula.ac.thABSTRACTPrevious researches on crowd simulation are often based on pre-computed path planning to reducecomputational time; however, the pattern of the crowd locomotion is usually unrealistic and the simulation itselfis also inflexible. This paper presents a novel technique to model an interactive time crowd simulation by usingautomatic path construction and Smoothed Particle Hydrodynamics (SPH) in order that each individual canautomatically search for the destination without path pre-computation. Two alternating stages approaches areused in our simulation. Firstly, the environment and crowd are set up, and crowd is then moved in accordancewith SPH in order to achieve smooth locomotion without fixed pattern. Each agent from a group of crowd cancreate a map that contains the knowledge of local environment that it gains from perceptions. The local path canbe extended and shared corresponding to the new environment or knowledge sharing with other agents. Anautomatic path determination is done in the next stage by using the potential field. The result from path selectionis then used to set the direction of external force in SPH model. By using our method, natural crowd locomotionunder a variety of conditions, such as forming and separating lane, obstacles avoidance and escape fromunknown area can be represented in interactive time.KeywordsCrowd simulation, Particle methods, fluid dynamics, Smoothed Particle Hydrodynamicssimulation that can realistically model path searchingbehavior of crowd when it is in unknown place byusing automatic path construction, which is modeledby imitating decision behavior of human. Localknowledge of each individual is going to beevaluated in order to find path. Crowd locomotioncan be described using fluid dynamics which cannaturally simulate crowd motion.Many researches have proposed various techniquesbased on pre-computed path for guiding eachindividual to the destination, for example,Probabilistic Roadmap which uses the constructionof all possible path in the environment and A* whichuses heuristic function for searching path to thedestination. In addition, potential field is anothermethod that is used to guide crowd locomotiontoward the destination. Despite the fact that pathplanning can make crowd motion smoother, thedecision behavior is not modeled naturally since eachindividual has knowledge of overall path inenvironment. Imagine if someone can escape fromthe unknown place where he has never been to, thisis not possible since human gain knowledge from1. INTRODUCTIONWith the advance in computer technology, it is notsurprising that sometimes we can not figure outbetween what is real and what is computergenerated. Crowd simulation is one of the mostpopular among computer graphics researchers.Visual realism of crowd simulation involves morethan model for decision and evaluation ofenvironment for automatic interactivity of individualsince it also has to avoid collision while moving inlocal direction and matching velocity of neighboringindividual. It is interesting and yet not easy to modela crowd simulation that has natural crowdlocomotion. This research proposes a crowdPermission to make digital or hard copies of all or part ofthis work for personal or classroom use is granted withoutfee provided that copies are not made or distributed forprofit or commercial advantage and that copies bear thisnotice and the full citation on the first page. To copyotherwise, or republish, to post on servers or to redistributeto lists, requires prior specific permission and/or a fee.Copyright UNION Agency – Science Press, Plzen, CzechRepublic.Short Communication papers249ISBN 978-80-86943-02-2
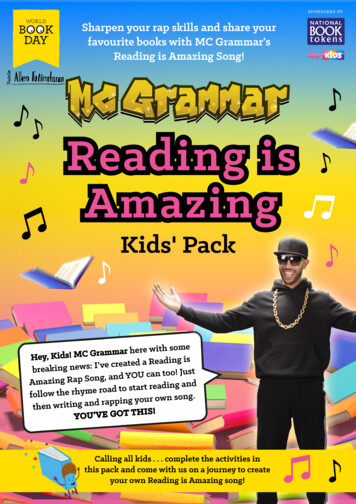
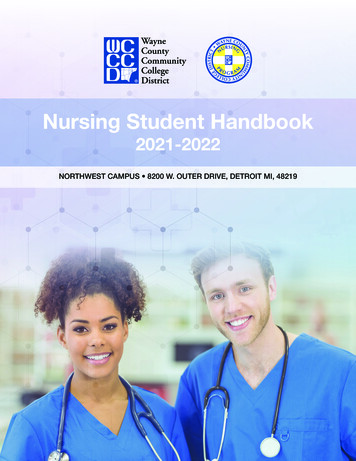
(a)(b)(c)Figure 1. Path selection of crowd simulation (a) one destination,(b) two closed destination, (c) two separated destinationexperience, which is different from person to person,and then that knowledge is used to select path. As aresult, the assumption of global knowledge aboutpath in the environment presented in previous worksis not correctly model human decision process.Agent–based approach is widely used to modelcrowd. It suits well with human behavior model sincethought, decision and locomotion of each individualcan be freely determined. However, it is timeconsuming when applied to crowd simulation. Forthis reason, fluid dynamics is used to describe crowdlocomotion. This method can model visual plausiblylarge crowd simulation. Without using agent inmodeling, crowd can only move to its assigneddirection and the model have no decision behavior.For this reason, we propose a crowd simulation thatcoupling fluid dynamics with Agent-based approach,which is used in modeling human decision, pathsearching and path construction from localknowledge to create characteristic crowd locomotion.We can animate crowd simulation that has morevisual realism in path determination and eachindividual’s decision. Our model can nts and conditions.This paper is organized as follows: in Section 2 somerelated works are presented, in Section 3 we describethe path construction approach. Locomotion behavioris proposed in Section 4. The implementation isdescribed in Section 5. Section 6 presents obtainedresult, while Section 7 is conclusions and futureworks.works to increase the realism in various aspects.Social potential field [Rie95a] describes theinteraction force between each unit of group. It canbe repulsive when each unit reaches the limiteddistance. However, it was not model crowdrealistically. Braun has proposed crowd simulationthat model individual behavior [Bra03b]. Eachindividual behavior is modeled by using variousparameters. This research based on Herbing model[Hel00a] that suits with crowd simulation inemergency. It was improved to increase more realismby [Lat04a] which has proposed emergencyavoidance force and force that try to help the victims.Wei has proposed Autonomous Pedestrians [Wei05a]that focus on modeling interactive behavior of crowdto the environment in its eyes sight. Hughes hasproposed a crowd simulation using fluid dynamics todescribe crowd locomotion [Hug03b]. Crowd isviewed as continuous dense particle. This work cananimate impressive crowd locomotion that isfrequently seen. Recently, Treuille has developed 3Dcrowd simulation based on previously stated work[Tre06a]. Massive amount of crowd can be simulatedin interactive time by calculating equations of fluidmotion using Eulerian scheme. This work cangenerate smooth crowd locomotion but the detailedbehavior of each individual is lacked and thecomputation time is based on control volume.However, the model of crowd behavior is not enoughfor realistic crowd simulation. Pre-computation ofpath is one of the factors that make crowd animationlooks more plausibly. Various techniques havewidely been used. One of them is path constructionusing grid table in A* [Rus94d]. Using this methodcan easily bring unit to the destination; however, theresulting animation is not plausible especially invehicles motion around the corner. ProbabilisticRoadmap (PRM) [San02a] uses random placing ofpoints onto the environment and connecting thesepoints using lines to obtain the main connected path.Bayazit [Bay04a] is coupling PRM with flocking forflocking simulation. However, the efficiency of theconstructed path depends on the number of2. RELATED WORKSSince 1987, Reynoids has proposed Boids-model thatdescribed behavior of unit in the group by usingspecific local rule for assigning each unit behavior[Rey87b]. It was developed thereafter to modelautomatic interactivity [Rey99c] which was based onthe idea that unit can move toward its assigneddestination while handling collision avoidance fromsurrounding units and obstacles in the environmentand locating near its neighboring units to form groupbehavior. This work has been developed in manyShort Communication papers250ISBN 978-80-86943-02-2
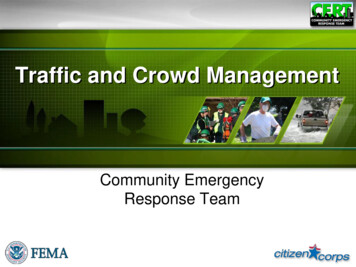
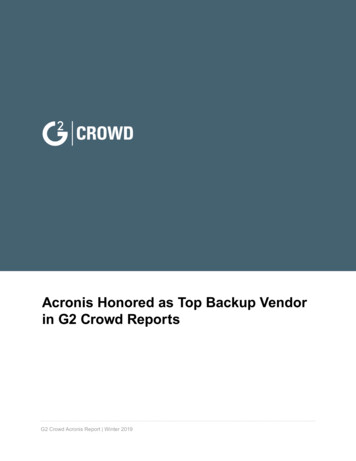
randomly-placed points. Using potential field toconstruct the path of crowd is one alternative that cangenerate smooth crowd motion. Its principle letscrowd moves toward the direction that has lesspotential value which can specify the factors thataffect the potential value as Treuille has presented incontinuum crowds [Tre06a].Although pre-computed path makes crowdlocomotion look smoother, it is still lack of a naturaldecision behavior since each individual is assumed tohave same level of knowledge. It is not possiblesince human gain knowledge from experiences anduses these experiences to select different paths. Thiscan be seen in the work of Murakami has proposedwhich stated about using agents to bring the victimsto the exit [Mur02b]. Crowd has unorderedmovements that are resulted from individualperception in its area. Agents can choose thecorrected path to the exit using less time while otherpeople who have to randomly search for the exititself or they can escape faster when they were toldby agents.We propose the crowd simulation using IndividualKnowledge-Merge based Path Construction andSmoothed Particle Hydrodynamics which integratesdecision model using individual knowledge and canbe shared and merged to create global path withoutthe need of pre-computation of path. As a result,crowd can have more natural locomotion thanprevious methods. SPH is pure Lagrangian method;it means that we can explicitly specify the rules toindividual. In our system, we model crowd volumeas a set of particles which each of these representseach individual composing crowd.3.1 PerceptionPerception is the starting point in development ofhuman abilities. The most obvious and most used isvision and communication and these abilities areused in daily lives. In this research, we use them togenerate the perception of new environment andreceive the news from communication. This sectiondescribes about the adaptation of human perception,which composes of perception from vision andcommunication to model a crowd simulation.3.1.1 VisionVision is one of the most important ability toperception. Since human can learn many things fromvision, a crowd simulation should not neglectmodeling of vision. This research models the visionof each individual by setting two rules in order toincrease realism to our crowd simulation. These rulesare limiting vision of each individual when the objector scene is out of sight or when seeing throughopaque material. In the technical term, the agentsperceive the environmental data by shooting thelimited sensor to detect the data as shown in Figure2.Figure 2. Vision3.1.2 CommunicationThis research sets this kind of perception by settingthe limited distance to communicate sincecommunication is occurred in finite distance thateach person can hear each other. The information canbe exchanged immediately when two of individualsreach this limited distance as shown in Figure 3.3. PATH CONSTRUCTIONIn this section, we will discuss about the pathconstruction of crowd so that it can move to anypositions in the environment. Path is constructedbased on local knowledge of each individual, whichis different from individual to individual and resultsfrom each individual’s experience. It means that ifone individual have global knowledge, it canconstruct the path direct to the destination withoutrandomly move through the environment. We willdescribe the design of knowledge constructionimitated from human perception by classifying it asperception from vision and from communication. Wethen described about knowledge analysis to constructa path of each individual. The model of optimizedpath decision which is derived from various factorand knowledge sharing of each individual that isused to construct global path of the environment isdescribed in last two subsections.Short Communication papersFigure 3. Communication3.2 CognitionCognition develops from perception and it can beeither large or little amount depending fromexperiences the one gained from their pastexperiences of vision and communication.Environment recognition is one of the most usedskills in our lives. This research uses this idea tomodel recognizable crowd in order that each251ISBN 978-80-86943-02-2
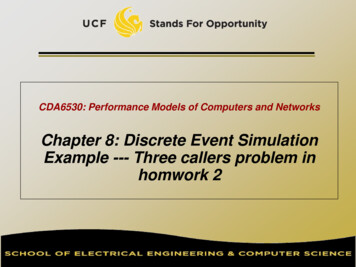
We use potential field as a method to construct thepath of crowd. More details of the algorithm can befound in [Tsa05b]. We start by assign potential at thedestination zero value and gradually increase thevalue when the distance is further. We assume thateach individual construct its path from its localknowledge, not calculating from global environment.Each individual can search for its optimum path fromusing only its knowledge. Since we do not use precomputed path, we can have two methods of pathconstruction. These are path construction from coverand uncover knowledge, which can be described asfollows:individual is closer to real human. The recognition ofeach individual result either from seeing in limiteddistance as stated in section 3.1.1 or fromcommunicating with other individuals as in 3.1.2.We assign instant recognition of environment to eachindividual perception. Crowd can rememberimmediately and its memory is not deleted until theend of the simulation. Moreover, an individual canrecognize more environments while moving in theenvironment. It means that if it can perceive thewhole environment then it can also recognize thatenvironment. Knowledge gain from recognition thatis used in path construction is called map-knowledge.This map-knowledge is classified into two groups:walkable area and unwalkable area as shown inFigure 4. These data make each individual know thearea that can connect to other unknown areas.3.3.1 Cover KnowledgeIf an individual has global knowledge toward thedestination, it means that it know at least one path tothe destination. For this reason, we can generatepotential field from the destination to the position ofthat individual directly by constructing from itsknowledge-based as described earlier.3.3.2 Uncover KnowledgeAgentObstacleFor an individual that has no global knowledgetoward the destination, which is called the maindestination in this section, it has to observe possiblepaths that may lead to the main destination. It has tomove in the unknown area to observe newenvironment. The connection area between known anunknown area is assigned to be the minor destinationthat can lead to the main destination by calculatingpotential field as described earlier. However, anindividual can have more than one connection area,so we evaluate potential field from the connectionarea of every point by choosing the minimum valueof evaluated cost from every connection area of theenvironment at the end of the time step of thesimulation. As a result, an individual can perceivethe connection area and the optimum path to chooseas shown in Figure 5.MapUnknown AreaFigure 4. Map construction3.3 DecisionDecision is an important part that affects realism of abehavior model. Path selection is one of the mostfrequent seen in our daily lives. This section presentsthe decision model for optimum path selection thatyields the most convincing crowd locomotion towardthe destination. In the comparison of each possiblepath can be evaluated from using cost in walking intothat path, which composes of the distance, crowddensity and the inconvenience of moving. Each actoris weighted by an adjustable parameter and can bewritten as follows:C αS pi βρ pi γg piwhereHigh potential areaLow potential areaObstacleUnknown areaAgentC is the cost in walking into that pathpi is the path from present positiontoward the destination iSis the distanceρgis the crowd density within eyesightFigure 5. The local potential density map3.4 LocomotionCrowd locomotion results from path selection inprevious process. Normally, a model of an individualmotion is only assigning its path toward thedestination that does not collide with obstacles andother individuals. However, when it comes to crowdsimulation, this is not enough since flocking ofmassive crowd yield characteristic pattern ofis the inconvenience of moving fromthe height of the ground at the eyelevelα , β ,γis the weight ofrespectivelyShort Communication papersS, ρ, g252ISBN 978-80-86943-02-2
locomotion. Although individuals within the samegroup share the same destination, it does not meanthat each individual has to move toward thedestination in the same pattern. Uncertain patternsare occurred since each individual has its owndecision that is characterized in the real life crowd.This research models a crowd simulation by usingSmoothed Particle Hydrodynamics. Crowd volumecan be viewed as particle systems that move inaccordance with the rule of fluid dynamics along thedirection determined by potential field. It cananimate smooth crowd locomotion under variousconditions, for example forming a lane when passingnarrow area and separating when passing wide areawithout collision occurred. The rule of smoothcrowed locomotion is described in the next section.correctly represent physical quantities and ensuresecond order accuracy interpolation. In this work, weused the special-proposed kernels as in Gross et al.[Mul03a] to achieve real time result.The gradient and laplacian of the summationinterpolant can be written as; As (r ) m jj N 2 As (r ) m jj N3.5 Knowledge SharingWherej.(4)vf is the external body forces in which thegravitational force and user-interaction force areincluded.From equation 4, the right hand side implies thatthere are three forces that responsible for the motionof a particle; pressure force, viscous force andexternal body force. The sum of these forces is usedto calculate the acceleration of particle i (1)rrr dv i f iai dtρirr pressure r visc r extfi fi fi fi(5)(6)Whererpi p jr r W (ri r j , h) (7),f i pressure m j2ρ jj Nr rr viscv j vi 2 r rand f i μ mj W (ri r j , h)m j , ρ j are the mass and density of particle j. N isa set of the neighboring particle within the smoothingrlength, h. W ( r , h) is the weighting functionj Nreferred as smoothing kernel in SPH. The smoothingv vr r j h in order to limit theρj(8)Another equation is continuity equation or massconservation. It states that the rate of density changeinteraction within finite radius. In addition, thissmoothing should be even and normalized in order toShort Communication papersv v 2W (r r j , h) (3)vA j is the value of a field quantity at particlelength sets W 0 forρj(2)Where v , ρ , P, μ are the fluid velocity, density,pressure and the kinematic viscosity, respectively.Locomotion behavior is based on Smoothed ParticleHydrodynamics (SPH) which is an interpolationmethod that approximates the value of a continuousfield quantity and its derivative by using discretesample points. SPH has been widely used forastrophysical problems and fluid dynamics, and hasrecently gained its popularity among computergraphics researchers. In SPH, the scalar quantity A atthe position r is approximated by a summationinterpolant.ρjAjvDv1v v p μ 2 v fρDt4. LOCOMOTION BEHAVIORj Nρjv v W ( r r j , h )Our crowd motion is described by using theequations of fluid flow, which are two equations:Navier-Stokes and continuity. The first equationstates that the momentum of the flow is alwaysconserved and any changes in fluid velocity resultfrom self-convection, pressure gradient, internalresistance and the external forces that act upon thefluid. However, the convective term can be omittedin Lagrangian description. Navier-Stokes equationcan be written in term of the substantial derivative asfollow,Knowledge sharing is one of common behaviors thatcan be seen every day. One of these that involveswith this research is knowledge sharing fromcommunication as seen in asking for path of tourists.This research models knowledge sharing as describeearlier in section 3.1.2. Knowledge is newenvironment that it does not know before.Knowledge sharing makes an individual constructinga path to new environment without having seen itearlier by itself. An individual can gain muchknowledge if it receives knowledge from otherindividuals from different areas, and then it canconstruct the optimized path to the destination faster.mjrr rAs (r ) A jW (ri r j , h)Aj253ISBN 978-80-86943-02-2
of an infinitesimal fluid element equal the totalamount of mass per volume entering and leaving thevolume occupied by the element. Thus, mass isalways conserved during flow. ρv ( ρv ) 0 tmeeting within the interactive distance as describedin section 3.1.2. An agent can also use the newknowledge same as using the knowledge which isgained from its perception.(9)Since the number of particles and their individualmass are constant, the mass conservation can beomitted completely. As a result, we need to evaluateonly Navier-Stokes equation to obtain the velocityand the position of each particle.In our work, we use the Navier-stokes equation to setthe rule of our crowd locomotion. The two leftmostterms on the right side of the equation are definedinternal interaction within group. These terms areused to achieve smooth movement and handlecollision. The external forces which are used to setthe direction of crowd are derived in the second stageof the simulation. The amount of force applied is setto be constant, while the direction is resulted fromthe decision.5. IMPLEMENTATIONOur crowd simulation based on behavior model andSPH which can generate smooth crowd locomotionin interactive time without using pre-computed path.Although it can create a smooth flow of crowd invarious situations, our model suits best with the caseof crowd escape from unknown environment. Theprocess of crowd simulation is started when theindividuals are assigned the random position. Thesystem will repeats the vision creation, map creation,path creation and movement creation processes untilthe crowd reaches its destination while the animationis shown in Display process as shown in Figure 6.Each of them can be described in details as:Figure 6. Simulation flow diagram5.2 DecisionPath can be constructed by the agent after creatingthe map. An agent from each group can select thepath toward the destination, using its map. In the casethat the map covers the main destination, potential isgenerated from the destination along the map in theagents’ knowledge as described in Section 3.3.1. Inanother case, potential is generated as described inSection 3.3.2. This generated potential is used toguide the individuals to select the direction, and thisselected direction is used as the driving force inlocomotion process.5.1 Perception and RecognitionThe agent is received knowledge from its perceptionby shooting the limited sensor to detect theenvironmental data. The agent of each group cancollect the knowledge from individuals in the samegroup and then merges the knowledge to keep in itsmap. The map composes of a known environment,connection area and obstacles. The information isthen used in decision process to select the path. Theirmaps can be merged when two individuals haveApproachesResultsNon pre-computed global pathAutomatic goal seekingMaking independent decisionsInteractive rate of large crowd simulationNatural phenomena of crowd locomotionProposed Approach99999Fluid-basedAgent-based99999Table 1. Experimental resultsShort Communication papers254ISBN 978-80-86943-02-2
Figure 7. Smooth flow under variety of conditions such asforming lane in narrow area or separating in wide areaFinally, IKM approach could seek the goal but didnot use pre-computed global path. The individual hada difference direction from its vision to find thedestination which consisted of both correct andincorrect path in the beginning. Then, it had the mostcorrect path in the next time when it communicatedwith each others. Moreover, it could demonstratenatural large crowd phenomena in interactive rate asshown in Figure 7.5.3 LocomotionCrowd locomotion can be created after the directionof each group is known. The locomotion can bedescribed by using SPH which is stated in section 4.Crowd volume seems to be collection of fluidparticles which move in accordance with the externaldriving force that act on them. This force is set tohave a constant value to keep the walking speed ofeach individual, while the direction of the force isdifferent since it is based on the potential fieldapproach. When an individual travels to newenvironment, its knowledge can always be increased.The results shown that IKM approach could be usedwith various situations which were flexible morethan pure Agent-based or Fluid-based as shown inTable 1.6. EXPERIMENTAL RESULTS7. CONCLUSIONS AND FUTUREWORKSIn our experimental results; three types, Agent-based,Fluid-based and Individual-Knowledge-Merge based(IKM), of simulation were compared. Theexperiments demonstrated how to find a path of thecrowd simulation in the unknown complexenvironment with the same initial conditions.Individuals were archived in random position andtried to the goal.This paper proposes a crowd simulation thatcoupling fluid dynamics with Agent-based approach,which is used in modeling human decision, pathsearching and path construction from localknowledge to create a characteristic crowdlocomotion. We can animate a crowd simulation thathas more visual realism in a path determination andeach individual’s decision. Our model can nts and conditions. Each individual canrecognize the difference knowledge based on theirpast experiences of perception, it can only generateown appropriate path to find the destinationnaturally. Moreover, the knowledge of eachindividual can be merged when they havecommunication. Individual uses a knowledge sharingto construct a path to new environment withouthaving seen it earlier by itself, because the newknowledge is new environment that it does not knowbefore. An individual can gain much knowledge, if itreceives knowledge from other individuals fromdifferent areas, and then it can construct theFirst, Agent approach based on AutonomousPedestrians research could fast to seek the goalbecause it used pre-computed path to guide allindividuals. This approach could not generate theloosed way behavior which was seen in the realworld. The system could demonstrate independentpath selection by self-individual decision but couldnot demonstrate a natural crowd behavior when theindividuals formed a large group.Next, Fluid approach based on continuum crowdsresearch could seek the goal same as first approachand it could demonstrate a natural large crowdphenomena in real time but could not specify eachindividual decision behavior.Short Communication papers255ISBN 978-80-86943-02-2
optimized path to the destination faster. We groupthe individuals that have the same knowledge anddestination for computational time reduction byspecifying all individual to use agent’s computationalresults.In the future work, we can improve the behavioralmodel for simulate the more realistic humanbehavior. This paper assumes that the sharedknowledge can be used by receiver immediatelywhich reduces a little of realistic recognitionbehavior of human, because the human must spendsthe time to learn the knowledge in the real world. Wecan propose an approach to address this problem bysetting the time of perceptions to recognize theenvironment which is translated to the localknowledge in next time. Moreover, the system can beincreased or improved the factors that have influencewith decision behavior in several situations.[Rei95a] REIF J., WANG H.: Social potential fields:A distributed behavioral control for autonomousrobots. In K. Goldberg, D. Halperin, J.- C. Latombe,and R. Wilson, editors, Interna- tional Workshop onAlgorithmic Foundations of Robotics (WAFR), A.K. Peters, Wellesley,MA, pp.431–459, 1995.[Rey87b] REYNOLDS C.: Flocks, herds, andschools: A distributed behavioral model. ComputerGraph-ics 21, 4, pp.25–34, 1987[Rey99c] REYNOLDS C.: Steering behaviors forautonomous characters. In Game Developers Conference, 1999.[Rus94d] RUSSELL S., NORVIG P.: ArtificialIntelli-gence: AModern Approach. Prentice Hall,1994.[San02a] Sanchez G., Latombe J., Using a prmplanner to compare centralized and decoupledplanning for multi-robot systems, Conf. on Roboticsand Automation, pp.2112–2119, 2002.[Tre06a] Treuille, A. Cooper, S. and Popović, Z.,Continuum Crowds. ACM Transactions on Graphics(TOG), pp.1160-1168, 2006.REFERENCES[Bay04a] Bayazit O., Lien J.-M., Amato N., Betterflocking behaviors using rule-based roadmaps. InAlgorithmic Foundations of Robotics V,SpringerTracts in Advanced Robotics 7 , Springer-VerlagBerlin Heidelberg, pp.95–111, 2004[Bra03b] Braun A., Bodmann B. E. J.,. Oliveira L. P.L, and Musse S. R. Modelling individual behavior incrowd simulation. In Proceedings of ComputerAnimation and Social Agents 2003, , NewBrunswick, USA, IEEE Computer Society. Pp.143148, 2003[Tsa05b] Tsai, R., Zhao, H., AND Osher, S., Fastsweeping algorithms for a class of hamilton-jacobiequations. SIAM Journal of Numerical Analysis 42,6, 2005.[Wei05a]Wei S., and Demetri T., Autonomouspedestrians. Symposium on Computer Animation,pp.19 – 28, 2005.[Hel00a] Helbing, D.; Farkas, I. and Vicsek, T.“Simulating Dynamical Features of Escape Panic”.Nature, v. 407, pp.487-490, 2000.[Hug03b] HUGHES, R. L., The flow of humancrowds. Annu. Rev. Fluid Mech. 35, pp.169–182,2003.[Lat04a] Latiff, M. S., and Widyarto S., the crowdsimulation for interactive virtual environment.,Proceedings of the 2004 ACM SIGGRAPHinternational conference on Virtual Realitycontinuum and
pizzanu@cp.eng.chula.ac.th ABSTRACT Previous researches on crowd simulation are often based on pre-computed path planning to reduce computational time; however, the pattern of the crowd locomotion is usually unrealistic and the simulation itself is also inflexible. This paper presents a novel technique to model an interactive time crowd .