Transcription
Trimble 3600 Zeiss EltaPart no.: 571 703 021Special & Professional Software User Guide
IntroductionThis manual is the second part of the Trimble3600 Zeiss Elta user manual. It includes the description of the application programs of the software packages Special and Professional.We would like to wish you every success in yourwork with your Trimble 3600. If you need anyhelp, we will be glad to be of assistance.YoursZSP Geodetic Systems GmbHCarl-Zeiss-Promenade 10D-07745 JenaTel.: 49 3641 64-3200Fax: 49 3641 64 3229E-Mail: surveying@zspjena.dehttp://www.trimble.comUser ManualTrimble 3600Zeiss Eltas 2nd PartSoftware Packages Special and ProfessionalEdition 1:15.02.2001Act. Software Release:V1.40Cat. No.:571 703 0211
Contents4CoordinatesTraverse.4-2New Traverse . 4-2Continue Traverse . 4-3Measure Traverse . 4-4End Traverse . 4-9Traverse Adjustment . 4-10Error Messages. 4-14Important Notes . 4-14Intersection of Lines.4-17Line Configuration . 4-17Measuring in a Local System . 4-19Measuring in a Coordinate System . 4-23Error Messages. 4-24Intersection of Arcs .4-25Arc Configuration . 4-25Measuring in a Local System . 4-28Measuring in a Coordinate System . 4-32Error Messages. 4-33Transformations.4-35Helmert Transformation . 4-35Define Transformation Parameters . 4-36Transform from System B - A . 4-38Transform from System A - B . 4-41Distance and offset . 4-42Transformation on a line . 4-45RoadLine Lite.4-47Definition of a Line. 4-48Definition of an Arc. 4-49Definition of a Spiral . 4-50Definition of the Start and End Stations . 4-512
ContentsMeasurement of Points . 4-51Setting Out of the RoadLine elements . 4-53Detail Points.4-55Verification Points . 4-55Recording Verification Points. 4-57Error Messages Verification Points. 4-595AdvancedApplicationsMultiple Rounds.5-2Preparation . 5-3Measuring the first half round. 5-4Measuring in two faces . 5-5Result Display. 5-73D Plane .5-9Working in a local system . 5-10Measure in a coordinate system . 5-13Area Calculation.5-15Calculation. 5-16Curves. 5-17Error Messages. 5-19Connecting Distances.5-21Local System . 5-22Coordinate System . 5-25Exit Program . 5-27Error Messages. 5-273
Contents8ConfigurationProgramsConfiguration Coordinates .8-2Detail Points. 8-2Traverse . 8-4Intersections . 8-4Helmert-Transformation. 8-4Configuration Special .8-6Multiple Rounds. 8-64
4CoordinatesThe programs Traverse, Intersections of Lines andArcs, Transformation and Roadline Lite are implemented in the instrument software packages Special and Professional. These programs are usefultools for the daily surveyors practical work in thefield.TraverseIntersections of LinesIntersections of ArcsTransformationRoadline LiteDetail Points4-1
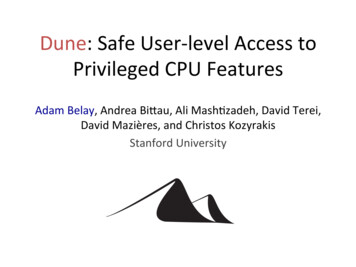
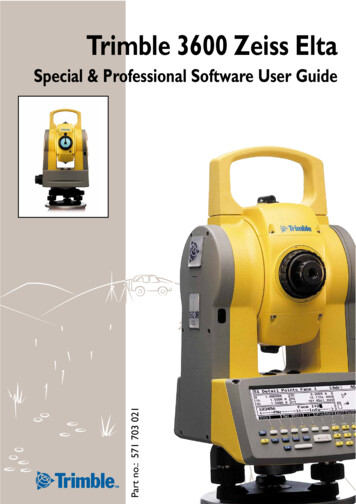
TraverseCoordinates5Traverse3Measurement of a Traversethrough back and foresights, and computationwith a choice of adjustments. During the Traversemeasurement it is possibleto measure detail points(side shots) which can alsobe corrected at the adjustment stage.BPDetail PointDetail Pointw2TP2w1BPEw3TP3BPTP1SDetail PointBPBP!1 TPi 20It is possible to measure from a start point S, up toa maximum of 20 Traverse Points TP and close onan end point E. The Stationing at S or E can incorporate up to 20 backsight points BP.New TraverseAfter program start, the computer searches for acurrent Traverse. If no traverse is found then a newtraverse is initialised and the first step is to inputthe actual instrument height and the first backsighttarget height (other parameters can also be controlled at this point):! to confirm and record the parameter input.4-2
TraverseOne can then choose the method of Stationing(coordinate and orientation) of the Start Point:"StationingThe methods for Stationing on a known point andFree Stationing are described in the Stationingchapter.If there is no Height Stationing then the traversewill be computed without heights and the heightsoftkey will show Zoff ."Measure TraverseAfter Stationing, the traverse will begin with themeasurement of the foresight to the first TraversePoint TP1.Continue TraverseIf after the program start an unfinished Traverse isfound, then the program will ask if you wish tocontinue the existing traverse:"Measure Traverse"Finish TraverseYesTo go further with continuing the exisitingunfinished traverse ,NoThen the unfinished traverse will be deleted after confirmation:4-3
Traverse"New TraverseYesthe Traverse will be deleted, and cannotbe continued at a later date. However,The measure data will remain in theProject file. A new traverse will be initialised.NoThe unfinished traverse will not be deleted. Return to Coordinates Menu.Measure TraverseAfter Stationing on the Start Point S the traversewill continue via the foresight measurement to thefirst Traverse point TP :to input the reflector height (also possiblevia the Inpt softkey."! or # to measure the foresighto TP .1After the measurement comes the Traverse Menu:Station Menu Start PointFurther foresightmeasurem.1MessungenkönnenimMeasuring further points to the traverse point TP.Further measurements canbe chosen. 2 face measurement is also possible. 4-4select On / Off.
Traverse! or # to start further measurements.After measurement, the residuals to the meanmeasurement will be displayed:MoreFuther Measurement PPoint on/offDelDelete MeasurementCfgConfigurationRsltResult of the coordinate of the foresight-TP (Interim Result).By select more measurement with the softkey More then the round count will be reset to 1.By more measurements of the fore and backsightsof Traverse points it is possible to achieve an improved accuracy of the Traverse points.This is the interim coordinate result as calculatedfrom the FS measurement. The end result is onlypossible after a BS measurement to this point ( andany required adjustment at closing).! or % to go back to the TP menu.Measure Detail PointsTo measure detail points(side shots) for the stationpoint."CoordinatesDetail Points2Handling/functionality as by Detail points.! or # to measure a detail point.Detail points can be later adjusted like the traversepoints TPi. Detail Points measured on start point Sor on traverse end point E will not be adjusted.4-5
TraverseView Traverse3Display of the traverse up tothis point.ModeForeBackDisplay of the TP coordinates.Toggle the resultsToggles betweenforesight and backsightFinish Traverse PointEREVwHorizontal distance of backsight in [m]Horizontal distance of foresight in [m]internal angle in [gon]HDHzhHorizontal distance - mean value in [m]Hz - mean value in [gon]Height difference - mean value in [m]4Change the traverse point,with selection of next TP orthe End Point EP.Choose 1:Choose 2:The next Station Point is a TP.The next Station Point is the End Point E.After moving the instrument the program goesfurther with the backsight to the Start Point:4-6
TraverseIt is normal practice to swap the instrument andtarget by unclamping the tribrachs. The instrument height and target height of the backsightmeasurement will be automatically set.or Inpt to change any of these values ifnecessary."orto measure the backsight to theprevious station (in this example it is the StartPoint).! #After the backsight measurement it is necessary tomeasure the foresight to the next TP: Attention !Do not forget to input the reflector height ofthe foresight measurement!" to input the reflectorheight of the foresight.! or # to measure the foresight.Afterwards he Traverse Point menu will be displayed for TP1:Traverse Point menuIt is possible to finish the Traverse Point here. Although further (additional) measurements arepossible for foresight and bachsight measurementas well as detail point (side shots).4-7
TraverseTo finish the traverse point and continue to thenext, the station point needs to be changed. Atthis stage it is possible to exit the traverse program- this will allow the instrument to be turned off.% to leave the program or& next station pointYou must then confirm that the current TraversePoint and foresight coordinates are to be storedand used for the next Station Point.NoThe TP will not be stored as a station andthe program will return to the TraversePoint Menu for further measurement.YesThe TP will be stored. Further with:At this point it is possible to exit the Traverse% is possible in everymenu.4-8To this menu you will come from every menu inthe program by pressing.%The continuation of the traverse is possible immediately or at a later time. It is possible to turn offthe instrument, and restart at a later time. After anew start the instrument program will return tothis point.
TraverseEnd TraverseContinue to End Point2To choose the next station point as the End Pointof the traverse. After the backsight measurementto the previous TP comes the End Point Menu:Station Menu End Pointto exit this menu and to save the selected„End Point“ as a normal Traverse Point. Then theprogram goes on with „Exit Traverse“ or „Direct tothe next point“ to continue traverse measurement.%Further backsight measure. 1At the End Point E of the traverse it is possible tomake further backsight measurement (no foresightmeasurements are possible).Open Traverse4It is possible to finish the traverse without closingon a point of known coordinates and directions.Stat. on a known Point2In order to correctly control and adjust the traverse,it is necessary to close on a known coordinate anddirection either by stationing on a known point orby free stationing. You need to confirm the continuation of the end point by:By stationing on a knownpoint it is possible to accidentally select the interimresult of the end point asthe known point from theproject data, thus providinga false adjustment.Free Stationing"3NoE will not be stored as the end point, andthe program will not go back to the Endpoint Station Menu.YesE will be saved as a station, ready to control the traverse on the final Stationing action as selected above.Stationing4-9
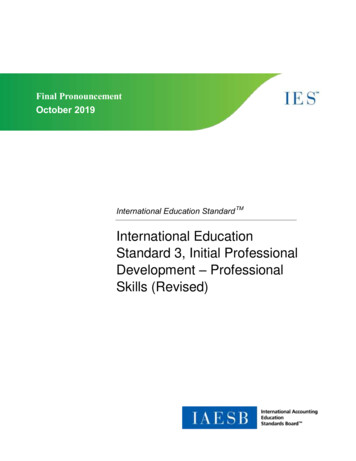
TraverseResult of the StationingAfter the Stationing, the program will go to theEnd Traverse menu:Polar Detail Points can be measured here, as atother traverse points.Measure Traverse"Traverse AdjustmentAdjustment of Traverse3The adjustment can be donewith either the classicBowditch (distance) adjustment, the Transit (proportional coordinate) adjustment or via a Transformation."'!to select. Attention !It is only possible to Adjust Traverse when aproper Stationing has been carried out on theend point E.ENominaldY4-10dXEmeasBy Stationing on the End Point E a nominal coordinate and direction ENominal will be computed.Comparison with the measured End point Emeaswill show angle direction and coordinate closingerrors, which can be distributed over the traverse.
TraverseBefore calculating a Bowditch or Transit adjustment it is possible to distribute the angle misclosure:NoNo distribution of angle misclosureYesThe angle misclosure will be evenly distributed.The adjustment is carried out in the following order:1. Distribution of angle misclosure (or not).2. Computation of new coordinate closing error.3. Adjustment of the new coordinate closingerror.Bowdich Adjustment1dWith the Bowditch adjustment, the adjustment ofthe coordinate closing error will be made in proportion to the measured distances with:vXi dXclos.error si svYi dYclos .error si svZi dZclos.error si s4-11
TraverseDisplay of the adjusted coordinates.ModeToggle between theresultsDisplay of the coordinate adjustments vXi, vYi, vZi.RsltTo display the misclosure errorsin the adjustment menu to finish and storethe results:%The adjusted coordinateswill be stored in the nextavailable address lines in theproject data.4-12Nothe adjustments will not be saved. Backto the End Point menu,YesSave the adjusted traverse coordinates,followed by the question:YesThe adjustment will also be applied to themeasured polar detail points (side shots).NoDetail points will remain with the measured coordinates.
TraverseTransit Adjustment2dThe Transit adjustment computes the adjustmentof the coordinate closing error poportionally to thesum of the absolute coordinate differences:vXi dXclos.error Xi XvYi dYclos .error Yi YThe height coordinates will be computed in proportion to the measured distances.Transformation"Transformation3dAnother possible alternative adjustment is thetransformation of the polygon traverse. The transformation will be computed via the Start and Endpoints (S and E):System A:S and EmeasSystem B:S and ENominal Attention !Correction of the angle misclosure is notpossible with the transformation method. Notransformation is possible if the start and Endpoint are the same (S E)4-13
TraverseError MessagesIf there is an inconsistency in fore and backsightsbetween following station points then:CfgSoftkey Link Configuration f configured error limits are exceede, then suitableerror information is given.Important NotesThe current traverse is handled on the internaldrive. This means that it is not possible to work ontwo traverses at the same time in two projects.% TipIf the project file is not available anymore, theresults from the last measured traverse canrestored.4-14
TraverseBattery ChangeIf the message comes from the instrument „Batterylow – please change“, the traverse measurementmust be interrupted for this time.% in every program levelChoose „Exit Traverse“ for changing the battery.Starting the traverse program again it is possible tocontinue on this point. Achtung !If the program was not executed correctly forchanging the battery, there is no way to continue on this point.For instruments with a battery buffer there s noneed to exit the program. Nevertheless the Batteryshould be changed quickly.4-15
4-16
Intersection of LinesCoordinates5Intersect. Lines4Calculation of the intersection of two lines in diversecombinations. The definingpoints can be measured,recalled points or manualinput. The Intersection pointS can also be set out.24S1d12d343The first step is to configure the method to definethe two intersecting lines. The intersections canthen be calculated in a local or a coordinate system.Line ConfigurationConfiguration1Here, different methods canbe used to define the twolines." ' to toggle the choices. confirm the selected options.4-17
Intersection of LinesPPLine Elementdefined throughLine L1Point – PointPoint – DirectonOther parametersNoneParallel through pointParallel with offsetPerpendicular throughpointLine L2Point – PointPoint – DirectionPerpendicular PointOther parametersNoneParallel through PointParallel through OffsetPoint-PointPDPoint-DirectionPLPerpendicular PointPaPHere are 4 common examples of the various configuration possiblilities:Parallel through PointPaA233SSParallel with offsetSeP411PP (-) x PP (-)PD (-) x PD (-)Perpendicular through Point12323S4S3411241PP (PaP) x PP (PaP)4-182PP (SeP) x PP (-)
Intersection of LinesMeasuring in a Local SystemLocal System2All line points will be defined by measuring in alocal system! or #Modeto measure point P1.Toggle the measuremode DHzV / y x z! or # to measure point P .2If the method of definition is point and directionthen after the measurement the direction can beinput:! to confirm the input."Measure in a localSystem% TipIt is possible to set the horizontal angle direction of the instrument before measurementof the first point.After definition of the line, other parameters (thathave been selected) must be defined.4-19
Intersection of Lines32S3412e.g. Parallel through Point (PaP).41! to measure point 12 (or 34).3# 3-42S# 1-2e.g. Parallel through Offset (PaA). The position ofthe offset is defined by looking from point P1 atpoint p2.41 to toggle a position left or right.! to confirm the input.1234S1e.g. perpendicular through point (SeP).2! to measure the point P12 (or 34).The definition of Line 2 is with the same method asLine 1.In the case of a Perpendicular Point then the measurement of point 3 will follow.4-20
Intersection of LinesAfter definition of the lines, the intersection pointwill be calculated and displayed:23Tau1P&&S"S4If the intersection angle is too acute or there is nointersection, then an error message will be displayed.Display of the offsetdistances betweenintersection pointand the line ng of the offset distances,CfgConfiguration of the intersection angles,RsltBack to the display of the Intersectionpoint.TauIntersection angle of the lines.!to record the intersection point.% TipIf the intersection falls outside of the lines,then the length of the line will be displayed.If the value of the intersection angle Tau isunder the selected value, then the value willbe displayed with * values.4-21
Intersection of LinesAfter finishing the intersection calculation, thefollowing menu will appear:Choose 1New intersection by redifining line 2.Choose 2New intersection by redefining line 1.Choose 3New intersection by redefining line 1 and 2.Choose 4Leave the program% in exit the program in any measurementmenu:4-22Noremain at the same point in the program,Yesleave the program
Intersection of LinesMeasuring in a Coordinate SystemCoordinate system3Before working in a coordinate system it is necessaryto have a current stationing.The majority of the program is identical to that ofthe local system. The following sections outline thedifferences.Choosing option 1 will leavethe program in the currentstationing definition andcoordinate system.EditRecall the pointfrom the editorInptInput the pointDefinition of LinesPoints of definition can be given in various ways: Measurement of the Line point (as in Local)Recall of the point using EditCombination of measure and recallManual input with Inpt"' ! to recall the point P from theEditor.1! or # to measure P .2Calculation of the intersection point is the same asin the local system.4-23
Intersection of LinesHowever, after confirming and recording the intersection point, it is possible to set out (stake out) thepoint:YesThe point will be set out in the setting outprogram as normalNoNo setting out, further with the program.Error Messages42If there is no intersection, or the intersection angleis smaller than that defined in the configurationthen the following error warning is given:3142If two points defining the line are identical then:134-24
Intersection of ArcsCoordinates5Intersect Arcs5Calculation of the intersection points of 2 circles or acircle and a line. The defining points can be measured,recalled or input. The intersection point can then beset out.S2M2M1S1The first step is to configure the definition of theintersection, and then to choose the definition in alocal or a coordinate system.Arc ConfigurationConfiguration1Under this menu, there aremeny available definitions" ' to toggle the choices. to confirm the selections.4-25
Intersection of ArcsMP-RIntersect Elementdefined throughCircle 1Middle Point – RadiusMiddle Point – Arc point2 Arc points - Radius3 Arc PointsOther elementsNoneParallel offset of radiusElement 2Arc 2LineMiddle Point - RadiusMP-K1Middle Point - Arc point2KP-R2 Arc points – Radius3KPGeometry Element 2Arc 2Middle Point – RadiusMiddle Point – Arc Point2 Arc Points - Radius3 Arc PointsOther elementsNoneParallel offset of radiusLinePoint – PointPoint – DirectionOther ElementsNoneParallel through PointParallelParallel through offsetPerpendicular to Point3 Arc pointsPaRParallel offset of the radius Attention !When defining an Arc with 2 arc points, select the two points K1 and K2 in the order sothat the Middle Point lies to the right of theline K1-K2 (seen from K1 to K2).4-26
Intersection of ArcsIntersectionsHere are examples of 4 possibilites for intersections:Intersection Arc – ArcFirst the Intersection point S1 will be computed asit falls on the right of the line M1 – M2.S2M2The second intersection point will be displayedwith the softkey S-2 .M1S1Intersection of Arc – LineM1First the intersection point S1 will be calculated.S2The second intersection point will be displayedwith the softkey S-2.S1Intersection Arc – ParallelM1S2First the intersection point S1 will be calculated.2S1The second intersection point will be displayedwith the softkey S-21122S2In this case S1 is right of the line and will be computed first.M1S11Intersection Arc – PerpendicularThe second intersection point will be displayedwith the softkey S-24-27
Intersection of Arcs12Intersection Arc left – PerpendicularS2If the arc lies left of the line P1 – P2 the th intersection point S1 will be computed first as it lies nearest to the line P1 – P2 .2M1S1The second intersection point will be displayedwith the softkey S-21Intersection Arc Right – Perpendicular2If the Arc lies left of the line P1 – P2, then the intersection point S1 will be calculated first as it liesnear to the point 12 .S2M11S1The second intersection point will be displayedwith the softkey S-212Measuring in a Local SystemLocal System2After configuration, thedefining points can be measured.! or # to measure M .1Then input the radius of Arc 1:! to confirm the input.4-28
Intersection of ArcsDepending on the configuration, further elementsmay here be defined: dRR-dR! to confirm the parallel offset.Definition of Element 2"Intersection ofLinesThe second element will then be defined. If theelement is a line, please refer to the Intersection oflines section.After defining the elements the first intersectionpoint will be calculated and displayed:! to record the intersection point.S-2to see the secondintersection pointP&&Sto display the otheroffset distancesRecRecord the offsetsCfgConfiguration of the intersection angleRsltBack to the intersection pointTauIntersection angles4-29
Intersection of ArcsThe intersection angle Tau is defined as follows:τIntersection Circle-CircleTauτthe intersection angle of both tangentsIntersection tBack to the intersecion displaythe intersection angle of the tangent withthe line.The limits of the angle Tau is defined in the configuration of Intersections.! to confirm and record.After completing the computation of the intersection points, the following menu will allow furthercomputation possibilities:4-30Choose 1Intersection by redefining Arc or line 2.Choose 2Intersection by redefining Arc 1.Choose 3Intersection will be redefined with Arcs 1 and 2.Choose 4Leave intersection of arcs.
Intersection of Arcsin every measurement menu to leave theprogram:%Noback and further with the program,YesEscape without saving.Measuring in a Coordinate SystemCoordinate System3Before working in a coordinate system it is necessaryto have a current stationing.The majority of the program is identical to that ofthe local system. The following sections outline thedifferences.Choosing option 1 will leavethe program in the currentstationing definition andcoordinate system.EditRecall points fromthe project dataInptInput a pointDefinition of LinesPoints of definition can be given in various ways: Measurement of the Line point (as in Local)Recall of the point using EditCombination of measure and recallManual input with Inpt" ' ! Recall of arc middle point Min Editor.14-31
Intersection of Arcs! or # to measure point M .2Calculation of the intersection point is the same asin the local system.However, after confirming and recording the intersection point you will be asked if you want to setout (stake out) the point:YesThe point will be set out in the normalway.NoNo setting out, further in the Program.Error MessagesIf no intersection can be calculated then:M2M12M114-32If the line lies exactly on the tangent or does notintersect then:
TransformationsCoordinates5Transformations6By selection of between 2and 20 common points, it ispossible to transform oneset of coordinates in systemA into coordinates in systemB, or vice versa.XxomP2P1dydxyYSelection of TransformationtypeHelmert TransformationHelmert Transformation1Computation of transformation parameters by max. of20 identical points.!2 PT 20The Helmert Transformation Menu.The Helmert-Transformation starts with the definition of the transformation parameters.4-33
TransformationsDefine Transformation ParametersTransformation definition1Definition of transformationparameters by selection ofidentical points in bothsystems.Select 1 to define the new transformation parameters by selecting common points in system A andsystem B.YX and yx points will be filtered. Select points todefine system A.FiltModeMoreDel4-34Select FilterProjToggle to the localSystemSearch for points in the same way as the normaleditor." ' ! to select and confirm.to add more pointsfrom the editorUp to 20 points can be selectedto delete a pointfrom the list! to continue to select system B pointsNoto return to the system A listYesto go further and select common points insystem B
Transformationsto return to HelmertTransformation menu%! to add points to the system B listMoreDelto add more pointsfrom the editorto delete a pointfrom the listPoints must be selected in the same sequence. It ispossible to have an uneven number of points inthe two systems. The software will ignore anyadditional point that has no partner.! to compute the transformation"Noto escape to the Transform menuYesTo compute the Helmert TransformationStationingOperation of Softkeys and their functions are thesame as in the Stationing Programs.to see the result of the Transformation, andthe Transformation Parameters%4-35
Transformationsdy, dx Coordinate shiftOmOrientations anglesScale factoro, aTransformation parametersIf only 2 points are transormed then the only thecoordinate shifts (dy, dx) and the orientationsangle will be computed.NoBack to the results menu.YesSaving of the results parameters and backto the Helmert transformation menu.Transform from System B - ASystem B - A2This allows the transformation of points in system B tothe coordinates system A Attention !If a Transformation is not currently defined,the program will automatically spring toTransformation definitionSelect from menu in the usual way. If a transformation is currently defined then:4-36
TransformationsNoto redefine the Tranformation ParametersYesTo use the existing Transformation Parameters to define the coordinate change.to return to HelmertTransformation menu%FiltModeProjSelect FilterProjToggle to the localSystemto select the Start Point of a block of pointsto be transformed!Change the projectto select the End Point of a block of pointsto be transformed!% TipIf you only wish to transform 1 point, thenselect this as the Start and End Point4-37
TransformationsNoto return to the Helmert TransformationmenuYesto go further with the Transformation calculationSelect if the points should be computed with aweighted distance (neighbourhood points).The transformed coordinates will be recorded inthe current project file AttentionAttention !For a weighted distances computation ofneighbourhood points a minimum of 3 identical points are needed.Doing a weighted distances computation ofneighbourhood points the residuals of the identicalpoints will be reduced to Zero. The transformednon identical points will be re-adjusted by newresiduals depending on their position to the identical points.The transformed points will be stored with thepoint identification PI and their new coordinates inthe project file.4-38
Transformations AttentionAttention !Only a 2D Transformation is computed. Theheight values will remain as they were originallyNoto return to the Helmert TransformationmenuYesto select and transform further pointsTransform from System A - BSystem A - B3Use this method to transform points in system A tothe coordinate system B"TransformationSystem B & AFollow the method described above to carry outthe Transformation.4-39
TransformationsDistance and offsetDistance and Offset2The coordinates of a localorthogonal line measurement will be transformedinto the global coordinatesystem.XxEPSPy!PT 2YThe coordinates of two identical points (Start- andEndpoint) must be known in both systems.Select the Start Point in the global coordinate system:to return to Transformation menu.%4-40PNrTo se
measure the foresight to the next TP: " to input the reflectorheight of the foresight. ! or # to measure the foresight. Afterwards he Traverse Point menu will be dis-played for TP1: It is possible to finish the Traverse Point here. Al-though further (additional) measurements are possible for foresight and bachsight measurement