Transcription
PavemetricsSoftware and Hardwareimprovements using 1mmx 1mm resolution 3D roadsurface dataVision Technology for Inspection of Transportation InfrastructuresPAVEMETRICS Systems Inc.150 Boulevard René-Lévesque Est, Suite 1820Québec, Québec, CANADAG1R 5B1www.pavemetrics.com
PavemetricsPavemetrics: Sensors forInfrastructure Inspection Founded 2009; a “Spinoff” of Canada’sNational Optics Institute(INO)3D sensor developmentAutomated dataprocessing algorithmdevelopmentTechnology used forRoads, Runways, Rails,Tunnels (400 systems)40 countries2
PavemetricsTechnologies Offered LCMS LRIS - Line Scan Imaging LRMS – Rut measurementsystem3
PavemetricsTechnologies Offered LCMS LRIS - Line Scan Imaging LRMS – Rut measurementsystem4
PavemetricsTechnologies OfferedLCMS - 25
PavemetricsAPPLICATION: Roads6
PavemetricsSpecificationsLCMS-1 vs LCMS - 2SpecificationsLCMS -1LCMS-2Acquisition Rate5,600 profiles/s28,000 profiles/sRange Accuracy/Resolution0.5mm / 0.25mm0.25mm / 0.05mm*Lateral Resolution1mm1mmField of View (lateral)4m4mData rate per km0.6 Gb/km3 Gb/km7
PavemetricsStorage needsSpecificationsLCMS-2Data rate per km3Gb/km10,000 mile network48Tb16 units x 50 8008
PavemetricsImproved vertical resolution ASTM and AASHTO standards utilized by the road profiling industry(ASTM E950, AASHTO M328, 56, 57) require the use of sensors witha vertical resolution of 0.05 mm or greater. vertical resolution specifications previously published byPavemetrics for the LCMS were not based on comparable testmethods adopted by other line lasers (RoLine, Gocator) currentlyaccepted in the industry.9
PavemetricsGocator model 2342A-3B-12Resolution and Test MethodLMI Gocator 2300 & 2880 Series User Manual,Document revision: D The vertical resolution (Z)of the Gocator is reportedas 0.013 – 0.037 mm Selcom’s test to determineresolution involves multiplescans of an object with adiffuse, painted whitesurface (a calibrationtarget) Resolution is defined as the“maximum variability ofheight measurementsacross multiple frames,with a 95% confidence”10
PavemetricsLCMS Resolution EvaluationProcedure 1/3 The objective of thePavemetrics’ test was tolikewise establish resolutionby determining the “maximumvariability of heightmeasurements across multipleframes, with a 95%confidence” The first step in the evaluationwas to create a similarcalibration target The Pavemetrics-developedtarget is a precision-machinedcylinder with a diffuse, paintedsurfaceClose-up View of Pavemetrics’ CalibrationTarget11
PavemetricsLCMS Resolution EvaluationProcedure 2/3 A computer-controlled, highaccuracy, translation table was thenused to control the position of thecalibration target/object in relation tothe LCMS The LCMS is setup to scan within itsworking range and is initialized forscanning the target While the LCMS was scanning, thetranslation table was used to movethe target away from the sensor at astep distance of 0.05 mm This movement produced a change invertical distance (of 0.05 mm) whichthe LCMS was used to measureComputer-controlled TranslationTable12
PavemetricsLCMS Resolution EvaluationProcedure 3/3 The cylinder was put into rotation in order tosimulate the motion of a vehicle. LCMS height/distance measurements were madeacross multiple frames with outputs at 1 inchintervals with the LCMS. Likewise, the variability of height measurementsmade across multiple frames was then analyzed The analysis established the maximum variability ofheight measurements made by the LCMS acrossmultiple frames to be 0.012-0.042 mm at aconfidence level of 95%13
PavemetricsLCMS-2 – Crack detection Same road sections were scanned with boththe LCMS 1 and LCMS 2 LCMS 1 scans were at the standard 5mminterval LCMS 2 scans were at 5mm, 2mm and 1mmfor comparison purposes14
PavemetricsExample 1 – 5mm LCMS 115
PavemetricsExample 1 – 5mm LCMS 216
PavemetricsExample 1 – 2mm LCMS 217
PavemetricsExample 1 – 1mm LCMS 218
LCMS 2 – 1MMLCMS 2 – 2MMLCMS 2 – 5MMLCMS 1 – 5MMPavemetricsExample 1 – AllConfigurations19
PavemetricsExample 2 – 5mm LCMS 120
PavemetricsExample 2 – 5mm LCMS 221
PavemetricsExample 2 – 2mm LCMS 222
PavemetricsExample 2 – 1mm LCMS 223
LCMS 2 – 1MMLCMS 2 – 2MMLCMS 2 – 5MMLCMS 1 – 5MMPavemetricsExample 2 – AllConfigurations24
PavemetricsExample 3 – 5mm LCMS 125
PavemetricsExample 3 – 5mm LCMS 226
PavemetricsExample 3 – 2mm LCMS 227
PavemetricsExample 3 – 1mm LCMS 228
LCMS 2 – 1MMLCMS 2 – 2MMLCMS 2 – 5MMLCMS 1 – 5MMPavemetricsExample 3 – AllConfigurations29
PavemetricsExample 4 – 5mm LCMS 130
PavemetricsExample 4 – 5mm LCMS 231
PavemetricsExample 4 – 2mm LCMS 232
PavemetricsExample 4 – 1mm LCMS 233
LCMS 2 – 1MMLCMS 2 – 2MMLCMS 2 – 5MMLCMS 1 – 5MMPavemetricsExample 4 – AllConfigurations34
PavemetricsLCMS-2 – Crack detection The LCMS 2 provides more complete crack detectionand is more sensitive to finer cracks Improvements are apparent even if you operate anLCMS 2 using a 5mm collection interval However 2mm and 1mm intervals will furtherimprove results35
PavemetricsNew Feature – Man madeobject detectionOpen ManholeCoverClosed ManholeCoverStorm-drain36
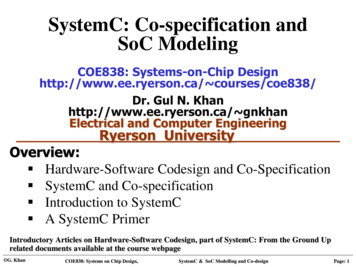
PavemetricsProblem (Example 1)Total Crackingis 3.2 meters( 10.5 feet);100% is falsecracking This pavement is inexcellent shape; not a crackto be seen However, there is a smallbreak in the surface aroundthe edge of the manholecover This generates 3.2 m offalse cracking 100% of this cracking isfalse37
PavemetricsSolution We deliberately detectthe MMO first in orderto exclude it fromcrack detection This also allows us toadd value byinventorying it Now the crackingquantity here is 0meters; which iscorrect38
PavemetricsData That Are Reported Bounding box: the X, Y location of box which is drawn aroundthe detected object (can relate back to GPS and milepoint) Area: the calculated area of the object Radius: only reported for manholes, radius of the manhole Width and Height: width and height of the drain or its boundingbox Perimeter: list of points that form the perimeter of the object,useful for highlighting the object in images used for reporting Type: two types reported at present; closed manhole or stormdrain/open man-hole39
PavemetricsLCMSRoadInspect InterfaceType: 0 (Closed Manhole)Bounding Box Height: 2.9 feetBounding Box Width: 2.9 feetRadius: 1.4 feetLocation: 3.6 meters in X and 6.4 in Y.40
PavemetricsExample 2: Without MMODetectionTotal Crackingis 5 meters( 16 feet);100% is falsecracking41
PavemetricsExample 2: With MMODetection42
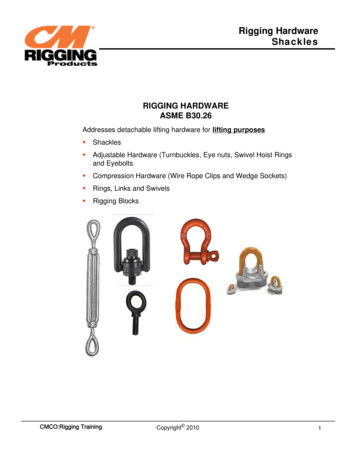
PavemetricsExample 3: Without MMODetectionTotal Crackingis 6.35 meters;false crackingis 4.07m.180% overreporting.43
PavemetricsExample 3: With MMODetection44
PavemetricsExample 4: Without MMODetectionTotal Crackingis 23.79meters; falsecracking is1.66m.8% overreporting.45
PavemetricsExample 4: With MMODetection46
PavemetricsLCMS-2 Laser class47
PavemetricsLCMS-2 Laser class48
PavemetricsRunway 08-26, Montmagny,QC
PavemetricsRunway 08-26, Montmagny,QC
PavemetricsRunway 08-26, Montmagny,QC900 m30 m
PavemetricsSurvey SpecificationsTotal length of runway: 900 metersTotal width of runway: 30 meters6 surveyed control points were used (3 on each end of the runway)44 surveyed test points were distributed over the entire runway surface.Total survey time 15 minutesTotal survey length 12kmNumber of scans used to cover runway surface: 11* (total in bothdirections)*A large number of scans were used to insure overlap between runs
PavemetricsSurvey (11 runs with approx.1m overlap between runs)Run 3Run 2900 mRun 1Ctrl. pointOverlap zone349 points de collageOverlap zone
PavemetricsTie Points (every 40m)349 tie points were automatically generated and used to automatically stitch the 11 runs
PavemetricsTie Points
PavemetricsControl Points6 surveyed control points (located on the ends of the runway) were used to align the Pavemetrics data to the traditional survey
PavemetricsControl Points (manual)Green: Position of control point beforealignment.Orange: Alignment pointGreen: Position of control point afteralignment
PavemetricsRunway 08-26 - result30 m900 metres
PavemetricsRunway 08-26 - result
PavemetricsRunway 08-26 - result
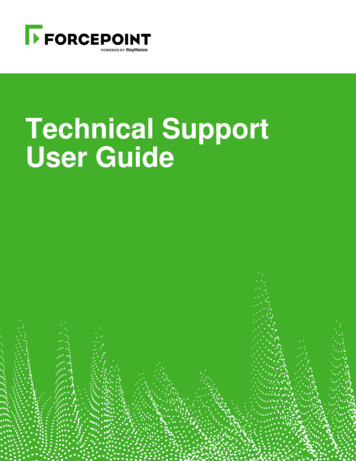
PavemetricsAccuracy AnalysisThe accuracy of the LDTM solution was evaluatedusing 44 survey targets which were painted on therunwayDue to the shape of the painted targets X, Ycoordinates were difficult to match, howeverelevation data (Z) was excellentWhat wewanted!What we got!
PavemetricsSurvey Target LocationsOverlaid on Pavemetrics’ DataSurveyed test points used to evaluate the accuracy of the LDTM solution
PavemetricsAccuracy analysisRTK Base GNSS used for the post-processing Base station was in La Pocatière, QC which is 62 km from the siteSurvey time was only 15 minutesData preparation and processing time took 3 hoursThe entire runway LDTM surface data was then alignedto the 44 surveyed points using a best fit algorithm inorder to minimise overall errors
PavemetricsConclusionsAccuracy versus survey results:Average RMS Error [X; Y; Z] [0.016; 0.011; 0.003]mAs expected X, Y accuracy was lower because of shape ofpainted survey markers.Elevation accuracy was an amazing 3mm overall!
PavemetricsLAS file output (10cm x10cm)
PavemetricsQuestions ?66
Gocator model 2342A-3B-12 Resolution and Test Method The vertical resolution (Z) of the Gocator is reported as 0.013 -0.037 mm Selcom's test to determine resolution involves multiple scans of an object with a diffuse, painted white surface (a calibration target) Resolution is defined as the "maximum variability of height .