Transcription
Mobile & Marine RoboticsThruster Control using LabVIEWReal-Time & FPGA GraphicalProgrammingEdin OmerdicSenior Research FellowMobile & Marine Robotics Research CentreUniversity of LimerickUniversity of LimerickContact:Edin Omerdicedin.omerdic@ul.iewww.mmrrc.ul.ie
Outline IntroductionMobile & Marine Robotics15:00 – 15:30 (30 min) RT&FPGA Tutorial: Motor Control with PWM SignalGroup 1Group 2Group 315:30 – 16:15 (45 min)16:15 – 17:00 (45 min)17:00 – 17:45 (45 min)
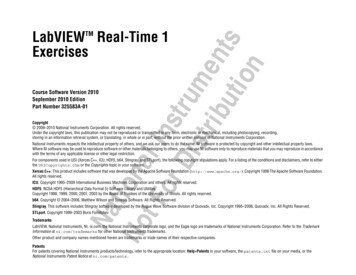
IntroductionmyRIOMobile & Marine RoboticsFeatures: 40 DIO6 AO10 AI2 UARTAudio InAudio OutAccelerometer
IntroductionMobile & Marine Robotics
IntroductionMobile & Marine Robotics
IntroductionReal-Time & FPGA cRIO ArchitectureMobile & Marine Robotics
IntroductionConnectivity: USBWiFi 802.11b,g,n(Optional) USB 2.0 – Gigabit Network Adapter Sabrent USB-G1000Mobile & Marine Robotics
IntroductionWhat is inside FPGA?Mobile & Marine Robotics
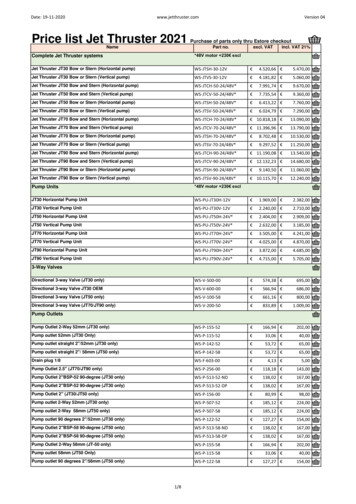
FPGA TutorialMobile & Marine RoboticsMotor Control with PWM SignalT200 Thruster Operating Voltage:6-20VMax Current:25AMax Power:350WMax Forward Thrust (16V)5.1kgfMax ReverseThrust (16V)4.1kgfMax Forward Thrust (12V)3.5kgfMax ReverseThrust sters/t200-thruster/
FPGA TutorialMobile & Marine RoboticsMotor Control with PWM SignalESC (AfroESC 30A)
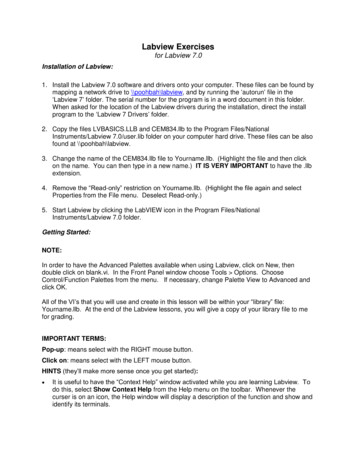
FPGA TutorialMobile & Marine RoboticsMotor Control with PWM SignalTS 1500msPWM Signal:Stopped Signal Voltage:3.3-5V Max Update Rate:400Hz Stopped:1500ms Max Forward:1900ms Max Reverse:1100msTPWM 1/400Hz 2500msTS 1900msMaxForwardTPWM 1/400Hz 2500msTS 1100msMaxReverseTPWM 1/400Hz 2500ms
FPGA TutorialMobile & Marine RoboticsMotor Control with PWM SignalmyRIO
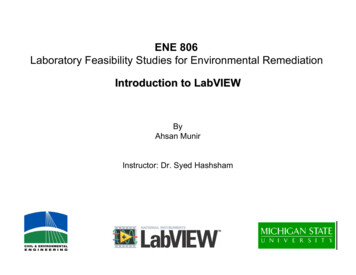
FPGA TutorialMobile & Marine RoboticsMotor Control with PWM SignalmyRIO-Oscilloscope Connection DiagramConnector A: GNDConnector A: DIO8/PWM0
FPGA TutorialMobile & Marine RoboticsMotor Control with PWM SignalSolution 1: PWM Signal Generation with Express VITs(ms)Duty Cycle Ts/TPWMTPWM 1/PWM Frequency (Hz)TPWM 1/400 (Hz) 2.5 (ms)Live Demo: RT Main.vi
FPGA TutorialMobile & Marine RoboticsMotor Control with PWM SignalSolution 1: PWM Signal Generation with Express VITS 1.5 (ms)Duty Cycle 0.60Duty CycleStopped0.760.60TPWM 2.5 (ms)TS 1.9 (ms)0.44nd (%)-100MaxReverse0StoppedDuty Cycle 0.76 100MaxForwardMaxForwardTPWM 2.5 (ms)TS 1.1 (ms)Duty Cycle 0.44TPWM 2.5 (ms)MaxReverse
FPGA TutorialMobile & Marine RoboticsMotor Control with PWM SignalSolution 1: PWM Signal Generation with Express VIDuty Cycleyy20.76y0.600.44y1xnd (%)-100MaxReverse0Stopped 100x1xx2MaxForwardy y1 y2 y1y y y 2 1 x x1 y1x x1 x2 x1x2 x1Note: Motor friction (Dead Zone problem) neglected!
FPGA TutorialLive Demo: RT Main2.viMobile & Marine RoboticsMotor Control with PWM SignalSolution 1: PWM Signal Generation with Express VI
FPGA TutorialMobile & Marine RoboticsMotor Control with PWM SignalSolution 1: PWM Signal Generation with Express VInd 0Duty CycleB 0.76A 0.620.60A-B-0.580.44nd (%)-100MaxReverse0Stopped 100MaxForwardnd 0Taking into account motor friction (Dead Zone)!nd 0
FPGA TutorialLive Demo: RT Main3.viMobile & Marine RoboticsMotor Control with PWM SignalSolution 1: PWM Signal Generation with Express VITaking into account motor friction (Dead Zone)!
FPGA TutorialMobile & Marine RoboticsMotor Control with PWM SignalSolution 1: PWM Signal Generation with Express VImyRIO – T200 Thruster Interconnection Diagram
FPGA TutorialMobile & Marine RoboticsMotor Control with PWM SignalSolution 2: PWM Signal Generation with FPGAFPGA Clock Frequency: fFPGA 40MHzFPGA Tick Period: TFPGA 1/40MHz 25nsTS 1.5 (ms)CS 60000 (ticks)StoppedTPWM 1/400 (Hz) 2.5 (ms)CPWM (ticks) TPWM / TFPGA 100000 (ticks)TPWM 2.5 (ms)TS 1.9 (ms)Ts(ms)CS 76000 (ticks)MaxForward(Ts/TPWM) * CPWM (ticks)TPWM 2.5 (ms)TS 1.1 (ms)TPWM 2.5 (ms)CPWM 100000 (ticks)CS 44000 (ticks)TPWM 2.5 (ms)CPWM 100000 (ticks)MaxReverse
FPGA TutorialMobile & Marine RoboticsMotor Control with PWM SignalSolution 2: PWM Signal Generation with FPGA
FPGA TutorialMobile & Marine RoboticsMotor Control with PWM SignalSolution 2: PWM Signal Generation with FPGA
FPGA TutorialMobile & Marine RoboticsMotor Control with PWM SignalSolution 2: PWM Signal Generation with FPGA
FPGA TutorialMobile & Marine RoboticsMotor Control with PWM SignalSolution 2: PWM Signal Generation with FPGA
Next le & Marine Robotics
Thruster Control using LabVIEW Real-Time & FPGA Graphical Programming Contact: Edin Omerdic edin.omerdic@ul.ie University of Limerick. Mobile & Marine Robotics Outline Introduction 15:00 -15:30 (30 min) RT&FPGA Tutorial: Motor Control with PWM Signal Group 1 15:30 -16:15 (45 min) Group 2 16:15 -17:00 (45 min) Group 3 17:00 -17:45 (45 min)