Transcription
1APLIKASI PROGRAMMABLE LOGIC CONTROLLER ( PLC ) PADA PENGASUTAN DAN PROTEKSIBINTANG (Y) - SEGITIGA (Δ) MOTOR INDUKSI TIGA FASAReza Fakhrizal1, Tedjo Sukmadi2, Mochammad Facta2Jurusan Teknik Elektro Fakultas Teknik Universitas Diponegoro Semarangemail : reza fakhrizal@yahoo.comABSTRAKMotor induksi tiga fasa merupakan jenis motor yang paling banyak digunakan secara luas baik dalam industri besar maupunkecil dibandingkan motor jenis lain. Karakteristik motor induksi yang memerlukan penanganan khusus adalah arus pengasutan yangbesar. Salah satu cara untuk mengatasi hal tersebut adalah dengan sistem pengasutan bintang (Y) - segitiga (Δ), dimana sistem inisangat sederhana, tidak memerlukan banyak piranti pendukung dan dapat diterapkan untuk semua jenis motor induksi tiga fasa.Tetapi tidak jarang pada metode pengasutan bintang (Y) - segitiga (Δ) terdapat suatu permasalahan antara lain pada saatperpindahan bintang (Y) ke segitiga (Δ) ada suatu diskontinuitas. Hal ini tentunya akan berakibat banyak pada suatu sistem.Pada Tugas Akhir ini, dibuat suatu sistem pengasutan bintang (Y) - segitiga (Δ) motor induksi tiga fasa berbasis ProgrammableLogic Controller. Pada saat sistem mengharuskan perpindahan posisi dari bintang (Y) ke segitiga (Δ), hal ini akan secara otomatisterjadi tentunya dengan mempertimbangkan agar tidak terjadi lonjakan arus yang besar. Pada Tugas Akhir ini juga dibuat sistemproteksi pada pengasutan bintang (Y) - segitiga (Δ) motor induksi tiga fasa yang berguna bila pada pengasutan bintang (Y) - segitiga(Δ) motor induksi tiga fasa nantinya terjadi suatu keadaan tidak normal (gangguan).Hasil pengujian menunjukkan pada saat pengasutan bintang (Y) - segitiga (Δ), awalnya motor akan beroperasi bintang (Y),setelah motor berada dalam posisi steady state, suplai akan lepas sesaat sebelum beroperasi segitiga (Δ). Hal ini dilakukan untukmenghindari agar motor tidak beropersi dalam posisi bintang (Y) dan segitiga (Δ) dalam waktu bersamaan. Arus asut motormenggunakan metode bintang (Y) - segitiga (Δ) sebesar 2,89 Ampere dengan waktu pengasutan 10 detik Pengujian dengan gangguanmenunjukkan bahwa sistem akan berhenti beroperasi setelah menerima input dari sensor, saat terjadi gangguan suplai lepas, satufasa lepas, dua fasa lepas, hubung singkatdan beban lebih baik ketika motor beroperasi bintang (Y), perpindahan bintang (Y) kesegitiga (Δ) maupun ketika motor beroperasi segitiga (Δ).Kata kunci : pengasutan bintang (Y) - segitiga (Δ), motor induksi tiga fasa, Programmable Logic ControllerI. PENDAHULUAN1.1Latar BelakangMotor induksi tiga fasa merupakan jenis motor yangpaling banyak digunakan secara luas baik dalam industribesar maupun kecil dibandingkan motor jenis lain. Hal inidimungkinkan karena motor jenis ini memiliki keunggulankeunggulan baik dari segi teknis maupun ekonomis.Meskipun memiliki keunggulan seperti di atas, motorinduksi juga mempunyai kekurangan, yaitu :a. Pengaturan kecepatan sulit dilaksanakanb. Arus awal (start) yang besar (lima sampai tujuh kaliarus normal)c. Faktor daya yang rendah terutama pada saatmemikul beban ringan.Meskipun motor induksi tiga fasa memilikikarakteristik arus awal yang besar namun hal ini dapat diatasidengan beberapa metode pengaturan, salah satunya adalahdengan sistem pengasutan bintang (Y)-segitiga (Δ), dimanasistem ini sangat sederhana dan dapat diterapkan untuk semuajenis motor induksi tiga fasa.Di lain pihak perkembangan teknologi industridewasa ini menuntut sistem pengaturan yang murah, bisadikendalikan dari jarak jauh, real - time, dan mudahpengawasannya. Pengaturan sistem dengan menggunakankomputer, terutama komputer jenis PC, saat ini sudahdikembangkan, dan sudah menjadi pilihan utama karenamudah, baik penanganannya maupun perawatannya.Penulis mencoba membuat sistem pengaturan suatuplant, dalam hal ini adalah pengaturan pada pengasutanbintang (Y) – segitiga (Δ) motor induksi tiga fasa, yangdikontrol dengan PLC. Dengan menggunakan sistempengasutan bintang (Y) - segitiga (Δ) diharapkan dapatmengurangi besar arus pengasutan pada saat motor start.1) Mahasiswa Jurusan Teknik Elektro UNDIP2) Staf Pengajar Jurusan Teknik Elektro UNDIPDi Tugas Akhir ini juga dibuat sistem proteksi padapengasutan bintang (Y) - segitiga (Δ) motor induksi tiga fasa,sistem ini berguna bila pada pengasutan bintang (Y) - segitiga(Δ) motor induksi tiga fasa terjadi suatu keadaan tidak normal(gangguan), hal ini tidak akan mempengaruhi sistem.1.2TujuanTujuan yang hendak dicapai dalam Tugas Akhir iniadalah pembuatan prototipe sistem otomatisasi pengaturanmenggunakan PLC pada sistem pengasutan dan proteksibintang (Y) - segitiga (Δ) motor induksi tiga fasa baik dalamkondisi normal maupun tidak normal (ada gangguan).1.3Pembatasan MasalahPembatasan masalah pada Tugas Akhir ini adalahsebagai berikut :1.2.3.4.5.6.7.Metode pengasutan yang digunakan adalah metodepengasutan bintang (Y) - segitiga (Δ).Motor induksi yang digunakan adalah motor induksitiga fasa 1 HP tipe sangkar tupai yang dikopelgenerator DC penguatan terpisah 1 HP.Tegangan asut yang digunakan adalah Y / Δ - 220 /127 V.Programmable Logic Control (PLC) yang digunakanadalah tipe OMRON CQM1-CPU21.Pembuatan program bantu menggunakan CXProgrammer,melaluikomunikasiserialmenggunakan kabel RS232.Penentuan tegangan referensi pada comparator yangdigunakan pada pengujian dilakukan secara empiris.Sensor arus lebih menggunakan Over Current Relay(OCR) merk Kasuga-MH tipe RAS703B, denganrange setting arus 2 – 7 A dan range setting waktuoperasi 0 – 1 detik.Makalah Seminar Tugas Akhir – Reza Fakhrizal
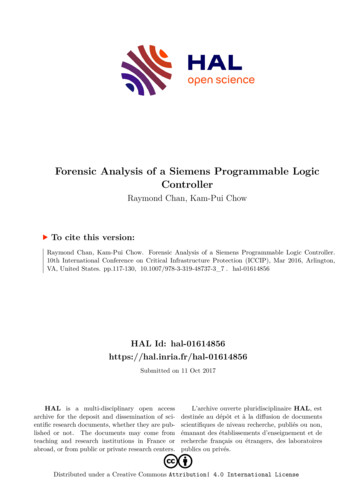
28.Sensor kegagalan fasa menggunakan Phase FailureRelay (PFR) merk GAE tipe RCM-50.9. Sensor beban lebih menggunakan Thermal OverloadRelay (TOR) merk Telemecanique tipe LRD-07,dengan range setting arus 1,6 – 2,5 Ampere.10. Gangguan yang diujikan meliputi gangguan suplailepas, satu fasa lepas, dua fasa lepas, hubung singkatdan beban lebih.II. DASAR TEORIKonstruksi Motor Induksi Tiga FasaMotor induksi terdiri dari dua bagian : stator ataubagian yang diam dan rotor atau bagian yang berputar,dimana kedua bagian ini dipisahkan oleh suatu celah udara.Bagian stator dihubungkan ke catu tegangan bolak-balik(AC), sedangkan bagian rotor tidak dihubungkan secaralistrik ke pencatu tetapi memiliki arus yang dihasilkan olehadanya arus induksi yang ditimbulkan dari arus stator, miripdengan kerja suatu transformator. Oleh sebab itu, bagianstator kadang dianggap sebagai primer dan bagian rotorsebagai sekunder motor.2.12.1.1Stator Motor Induksi Tiga FasaInti stator motor induksi terbuat dari lapisan pelatbaja beralur yang didukung dalam rangka stator yang terbuatdari besi tuang atau pelat baja yang dipabrikasi. Belitan motordiletakkan dalam alur stator yang terpisah 120 derajat listrik.Belitan fasa dapat tersambung secara segitiga ( ) ataupunbintang (Y).2.1.2Rotor Motor Induksi Tiga FasaRotor dari motor induksi tiga fasa dibedakanmenjadi 2 tipe yaitu:1.Rotor sangkar tupai (squirrel–cage rotor)Inti dari rotor motor induksi tipe sangkar tupaiterdiri dari lapisan-lapisan konduktor yang dipasangkansejajar dengan poros dan mengelilingi permukaan inti.Konduktor tidak terisolasi dari inti, karena arus rotor secaraalamiah akan mengalir melalui tahanan yang paling kecil,yaitu konduktor rotor. Pada setiap ujung rotor, semuakonduktor rotor dihubung singkat dengan cincin ujung.Konduktor rotor dan cincin-ujung serupa dengan sangkartupai yang berputar sehingga dinamakan motor induksisangkar tupai.Gambar 2.2 Motor tipe rotor belitan (wound rotor)2.2Prinsip Kerja Motor InduksiPrinsip kerja motor induksi tiga fasa didasarkan padahukum Faraday (tegangan induksi akan ditimbulkan olehperubahan induksi magnetik pada suatu lilitan) dan hukumLorentz. (perubahan magnetik akan menimbulkan gaya).Prinsip dasar dapat dijelaskan sebagai berikut1. Tegangan induksi akan timbul pada setiap konduktordiakibatkan oleh medan magnet yang memotongkonduktor (hukum Faraday).2. Karena konduktor dihubungkan menjadi satu,membuat tegangan induksi menghasilkan arus yangmengalir dari konduktor ke konduktor lain.3. Karena terjadi arus diantara medan magnet makaakan timbulah gaya (hukum Lorentz).4. Gaya akan selalu menarik konduktor untuk bergeraksepanjang medan magnetik.Gambar 2.3 Prinsip kerja motorKecepatan motor induksi tiga fasa sangatdipengaruhi oleh jumlah kutub pada stator dan frekuensisumber tegangan yang dirumuskan sebagai berikut.ns 120. f.(2.1)pdimana :nsfP kecepatan sinkron (rpm) frekuensi (Hz) jumlah kutubSelisih antara kecepatan rotor dan kecepatan sinkrondisebut slip. Slip dapat dinyatakan dalam putaran permenit,tetapi lebih umum dinyatakan sebagai persen dari kecepatansinkron. Slip dinyatakan dengan persamaan sebagai berikut.s ns n . .(2.2)nsGambar 2.1 Motor tipe rotor sangkar tupai (Squirrel–cage rotor)Rotor belitan (wound rotor)Wound rotor adalah tipe motor yang memiliki rotorterbuat dari lilitan. Lilitan rotor tersebar secara seragam padaslot-slot dan secara umum dihubungkan secara wye, ketigaterminal tersebut dihubungkan dengan slip-ring kemudiandihubungkan dengan sikat yang diam (stationary brushes),dengan demikian maka motor bisa diberi resistor dari luarsehinga kecepatan motor dapat diatur dengan mengubah-ubahnilai tahanan resistor luar.dimana :s Slipn s Kecepatan Sinkron (putaran/menit)n Kecepatan rotor (putaran/menit)2.2.3Pengasutan Motor Induksi 3 FasaPada motor induksi yang diam apabila tegangannormal diberikan ke stator maka akan ditarik arus yang besaroleh belitan primernya. Motor induksi saat dihidupkan secaralangsung akan menarik arus 5 sampai 7 kali dari arus bebanpenuh dan hanya menghasilkan torsi 1,5 sampai 2,5 kali torsibeban penuh. Arus mula yang besar ini dapat mengakibatkandrop tegangan pada saluran sehingga akan menggangguperalatan lain yang dihubungkan pada saluran yang sama.Untuk mengurangi besarnya arus pengasutan pada motor, adaMakalah Seminar Tugas Akhir – Reza Fakhrizal
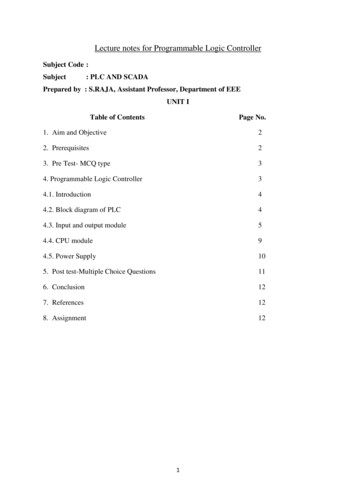
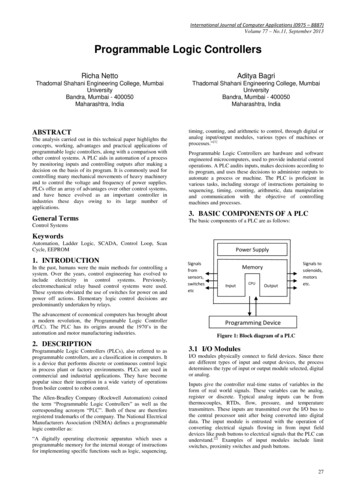
3beberapa metoda pengasutan motor induksi yang biasadigunakan, yaitu :- Pengasutan dengan primary resistors (rheostat)- Pengasutan dengan auto-transformator- Pengasutan bintang - segitiga (Y - Δ)- Pengasutan dengan tahanan rotor (rheostat), khususuntuk motor tipe rotor belitan.Pengasutan Motor Induksi Tiga Fasa Metode Bintang–Segitiga (Y-Δ)Sistem pengasutan bintang segitiga adalah metodepengasutan dengan pengurangan tegangan. Sebuah motorinduksi dengan hubungan bintang - segitiga memiliki enambuah terminal sehingga dapat diswitch, baik untuk hubunganbintang atau segitiga. Motor dihubungkan bintang (Y) padawaktu pertama kali di-start, dan ketika motor telah mendekatikecepatan normal, hubungan diubah menjdi hubungansegitiga (Δ).Saat terhubung bintang, tegangan masing-masing fasadikurangi sebesar 1/ 3 (57,7 % tegangan saluran) karena itutorsi yang timbul menjadi 1/3 dari apabila motor langsungterhubung delta. Arus saluran dikurangi sebesar 1/3.I st per fasa 13.(2.3)I sc per fasadimana:Isc arus start bila motor terhubung ΔIst arus start bila motor terhubung YPrinsip Kerja Rangkaian Pengasutan Bintang - SegitigaPengasutan Y – Δ bekerja sesuai dengan Gambar2.4, yaitu apabila motor di-start maka kontaktor C1 dan C3ON, sehingga motor akan terhubung ke jala-jala secarabintang. Setelah beberapa saat kontaktor C3 OFF dankontaktor C2 ON, sehingga motor akan terhubung ke jala-jaladengan hubungan segitiga.RSTC1menunjukkan kemampuannya yang dapat dengan mudahdiubah-ubah sesuai program yang dibuat dankemampuannya dalam hal memory program yang telahdibuat. Logicmenunjukkan kemampuannya dalam memproses inputsecara aritmatik (ALU), yakni melakukan operasimembandingkan, menjumlahkan, mengalikan, membagi,mengurangi, dan negasi. Controllermenunjukkan kemampuan dalam mengontrol danmengatur proses sehingga menghasilkan output yangdiinginkan.Fungsi PLC adalah sebagai berikut:1. Kontrol Sekuensial. PLC memproses input sinyal binermenjadi output yang digunakan untuk keperluanpemrosesan teknik secara berurutan (sekuensial), disiniPLC menjaga agar semua langkah dalam prosessekuensial berlangsung dalam urutan yang tepat.2. PLC secara terus menerus memonitor status suatu sistem(misalnya temperatur, tekanan, tingkat ketinggian) danmengambil tindakan yang diperlukan sehubungan denganproses yang dikontrol (misalnya nilai sudah melebihibatas) atau menampilkan pesan tersebut kepada operator.Komponen PLCPLC atau biasa disebut PC (Programmable Controller)adalah suatu perangkat yang dapat dengan mudah diprogramyang digunakan untuk mengontrol peralatan. PLC sederhanamempunyai komponen utama berupa CPU (CentralProcessing Unit), Unit I/O, Programming Console, Rack atauMounting Assembly dan power supply. Sistem dari sebuahPLC ditunjukkan pada Gambar 2.5.PLC ProgramInput ModuleC1Central ProcessingUnitOutput ModuleC1C2C3C2C3C2C3Gambar 2.4 Pengasutan Bintang - Segitiga2.4 Sekilas Tentang PLCProgrammable Logic Control (PLC) adalah suatuperalatan elektronika digital yang dapat memprogram memoriuntuk menyimpan instruksi–instruksi dan melaksanakanfungsi khusus seperti logika, sekuensial, timer, counter danaritmatika untuk kontrol mesin dan proses.Programmable Logic Control (PLC) merupakan tipesistem kontrol yang memiliki input device yang disebutsensor, kontroller serta output device. Peralatan yangdihubungkan pada PLC yang berfungsi mengirim sebuahsinyal ke PLC disebut input device. Lalu PLC akanmengirimkan sinyal output ke output device.Konsep PLCSesuai dengan namanya, konsep PLC dapat dijelaskansebagai berikut : ProgrammablePiranti InputPiranti OutputGambar 2.5 Sistem dari suatu PLC2.5 Gangguan dan Proteksi Pada Sistem Tenaga ListrikGangguan dalam sistem tenaga listrik adalah keadaantidak normal dimana keadaan ini dapat mengakibatkantergangguannya kontinunitas pelayanan tenaga listrik.Gangguan ini dapat mengakibatkan kerusakan ataumempengaruhi sistem, antara lain :1. Terjadi gangguan yang tidak normal dari batas yangdiijinkan yang akan menyebabkan arus yang besarmengalir pada saluran.2. Gangguan dapat menurunkan, menghilangkan ataumenaikkan sistem tegangan diluar batas yangdiijinkan.3. Gangguan dapat menyebabkan sistem daya tigaphase menjadi tidak simetris atau tidak seimbang.4. Gangguan dapat menghalangi aliran daya.5. Gangguan dapat mengakibatkan sistem tidak stabildan menghentikan aliran daya sistem tenaga listrik.Makalah Seminar Tugas Akhir – Reza Fakhrizal
46.Gangguan hubung singkat akan menimbulkan arusgangguan yang sangat besar yang dapat dengancepat merusak peralatan generator, motor maupuntransformator.Seluruh sistem tenaga listrik pasti membutuhkanproteksi. Pilihan sistem proteksi tergantung dari beberapaaspek seperti tipe, dan rating dari peralatan yang diproteksi,kegunaan peralatan tersebut, lokasi, kondisi abnormal, biaya,dan sebagainya. Suatu sistem proteksi akan merasakankeadaan yang abnormal pada bagian dari sistem tenaga danmemberikan peringatan atau mengisolasi keadaan tersebutdari sistem yang sehat.2.5.1Relay Arus Lebih (Over Current Relay)Relay arus lebih (Over Current Relay disingkat OCR)berfungsi untuk memproteksi peralatan listrik terhadap aruslebih yang disebabkan oleh gangguan hubung singkat 2 phasaatau 3 phasa.Relay arus lebih memiliki input tunggal dalam bentukarus bolak – balik. Output dari relay adalah kontak yangnormal terbuka, yang berubah menjadi tertutup ketika relaytrip. Relay ini mempunyai dua buah setting, yaitu settingwaktu dan plug setting. Setting waktu memutuskan waktuoperasi dari relay sementara plug setting dibutuhkan bagirelay untuk pick up. Nama plug setting diambil dari relayelektromekanik. Pada relay ini, kita harus memasukansebuah plug yang pendek dalam jembatan plug setting,sehingga untuk mengubah sejumlah lilitan dari koil operasiuntuk mendapatkan nilai pick up yang khusus. Blok diagramdari OCR ditunjukan oleh gambar 2.6.Gambar 2.6 Blok diagram dari OCR2.5.2Relay Kegagalan Fasa (Phase Failure Relay)Relay kegagalan fasa (Phase Failure Relay disingkatPFR) berfungsi untuk memproteksi peralatan listrik terhadapgangguan yang disebabkan oleh lepasnya satu, dua atau tigafasa serta ganguan keseimbangan fasa dari suatu sistem.Relay arus lebih memiliki input tunggal dalam bentukarus bolak – balik. Output dari relay adalah kontak yangnormal terbuka, yang berubah menjadi tertutup ketika relaytrip. Relay ini mempunyai setting unbalance. Blok diagramdari OCR ditunjukan oleh gambar 2.7.RNormal(NO)arus yang ditimbulkan maka semakin cepat pula TOR akantrip. Apabila penyebab dari beban lebih masih terjadi, makarele akan trip kembali dan reset pada interval waktu yangditentukan. Proteksi dilakukan dengan melalui fungsikontrolnya (tidak ada pemutusan daya langsung padapengaman beban lebihnya). Blok diagram dari TORditunjukan oleh gambar 2.8.1. Setting arus2. Tombol TEST3. Tombol STOP4. Tombol RESET5. Indikator TRIP6. Tutup pengaman7. Manual / Otomatis selektorGambar 2.8 Blok Diagram TORGambar 2.9 Kurva trip TOR LDR-072.6 Konsep Dasar Sistem KontrolSistem kendali merupakan hubungan timbal balik antaraunsur-unsur yang membentuk suatu sistem untuk memberikanhasil yang dikehendaki yang disebut dengan tanggapan.Berdasarkan ada tidaknya acuan untuk melakukan aksikendali terhadap proses, maka sistem kendali dapat dibedakanmenjadi dua sistem yaitu sistem loop terbuka (open loop) dansistem loop tertutup (close loop). Pada Tugas Akhir inidigunakan sistem kendali loop tertutup (close loop).Sistim kendali loop tertutup (Close Loop)Sistem kendali loop tertutup merupakan sistem kendaliyang mengunakan keluaran sebagai pembanding denganacuan sehingga aksi kontrol yang keluar dari controler akanberpengaruh terhadap error. sistem ini mengacu pada suatusistem yang mempunyai gangguan, dimana sistem akancenderung mengurangi perbedaan yang terjadi pada masukandan keluaran sehingga kestabilan akan tercapai.MasukanFail(NC) PengendaliPlantKeluaran-SGambar 2.10 Diagram blok sistem pengendali loop tertutupWTGambar 2.7 Blok diagram dari PFR2.5.3Relay Beban Lebih (Overload Relay)Untuk melindungi peralatan seperti motor induksiterhadap kerusakan akibat beban lebih (overload) diperlukansuatu pengaman overload relay atau biasa disebut ThermalOverload Relay (TOR). Pemanfaatan TOR salah satunyadigunakan untuk mengetahui arus lebih yang ditimbulkanoleh beban, sehingga nantinya TOR akan trip sesuai denganbesarnya arus yang ditimbulkan oleh beban. Semakin besarIII. PERANCANGAN DAN PEMBUATAN ALATGambaran umum tentang alat dapat dilihat pada blokdiagram berikut ini. Personal KomputerMakalah Seminar Tugas Akhir – Reza Fakhrizal
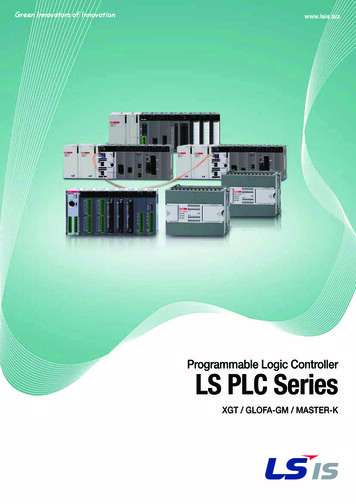
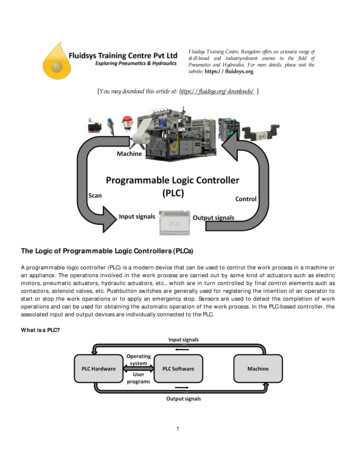
5Gambar 3.1 Blok diagramPenjelasan secara umum dari blok sistem pengasutan danproteksi bintang (Y) – segitiga (Δ) motor induksi tiga fasadengan PLC diatas adalah sebagai berikut : Motor Induksi Tiga FasaSebagai plant sistem yang dikendalikan. Motor induksitiga fasa yang digunakan adalah motor induksi tiga fasa 1HP rotor sangkar tupai dengan tegangan kerja Y / Δ 220 /127 V. Generator DC 1 HP Penguatan TerpisahBerfungsi sebagai beban yang dikopelkan ke motorinduksi tiga fasa. Sistem Sensor KecepatanBerfungsi untuk mengetahui kecepatan motor induksitiga fasa dan sebagai umpan balik dari sistem kendali.Menggunakan piringan sensor dengan 360 lubang,rangkaian optokopler, rangkaian F to V, parator), serta rangkaian driver rele. Personal KomputerBerfungsi sebagai piranti untuk membuat program PLC.Antara komputer dengan PLC dihubungkan oleh kabelserial RS232. PLCDigunakan sebagai kontroler motor induksi tiga fasa.Yang menentukan operasi yang akan dilakukan motorinduksi apabila terjadi gangguan dari program yangdibuat. Antara PLC dengan panel kontrol dihubungkandengan tiga header 10 pin, satu untuk input dan duauntuk output. Panel KontrolBerfungsi untuk mengontrol motor induksi melaluitombol on, tombol off, tombol gangguan dan tombolreset yang terdapat pada blok TOMBOL INPUT. Padapanel kontrol juga terdapat blok lampu LAMPUINDIKATOR yang akan mengindikasikan operasi dangangguan yang sedang terjadi pada motor induksi tigafasa serta blok RANGKAIAN TENAGA yang terdiridari kontaktor 3 fasa yang telah dirangkai sesuai dengandiagram pengawatan pengasutan dan proteksi bintang(Y) – segitiga (Δ) motor induksi tiga fasa.Spesifikasi dan Motor Induksi Tiga Fasa danGenerator DC Penguat TerpisahAdapun untuk perancangan pengaturan kecepatanmotor DC penguatan terpisah ini dibutuhkan data spesifikasiyang lengkap. Tabel 3.1 menunjukkan spesifikasi dari motorinduksi tiga fasa yang dikopel dengan generator DCpenguatan terpisah yang digunakan :digunakan dalam Tugas Akhir ini yaitu sebesar 220 mbangkan tegangan kerja maksimal motor padakondisi segitiga (Δ) adalah 220 V.3.2Perancangan Perangkat KerasPerancangan perangkat karas (hardware) terdiri atasperancangan setiap blok yang menyusun sistem kontrolsecara keseluruhan.3.2.1 Perancangan Blok Rangkaian KontrolBlok rangkaian kontrol terdiri dari frequency to voltageconverter (f to v), operational amplifier, rangkaianpembanding (comparator), dan driver rele.Sedangkan pada blok power supply, power supply 24Volt digunakan sebagai suplai PLC dan suplai lampuindikator. Power supply 5 Volt digunakan untuk menyuplaiinput optocoupler. Power supply 12 Volt digunakan untukmenyuplai input F to V. Power supply /-15 Volt digunakanuntuk menyuplai input operational amplifier dan comparator.Penjelasan tiap blok rangkaian kontrol diperlihatkanGambar 3.2.MOTOR INDUKSI 3ØRANGKAIAN TENAGA&PANEL MONITORINGOVERCURRENTRELAYINPUTRANGK. KONTROLDANPOWER SUPLAIPHASEFAILURERELAYPLCCQM1 – CPU21 Gambar 3.2 Diagram rangkaian kontrolBlok rangkaian kontrol yang telah mengalami proseswiring diperlihatkan Gambar 3.3.MotorInduksi 3Rang. Kontrol&Power SuplaiPLCCQM1-CPU21PFRTORGambar 3.3 Blok rangkaian kontrol setelah proses wiring3.2.2 Perancangan Rangkaian TenagaDiagram pengawatan rangkaian tenaga diperlihatkanGambar tx1K34uOCRSesuai dengan spesifikasi seperti yang terlihat padaTabel 3.1 dari plant yang digunakan berupa motor induksitiga fasa 1 HP, dapat ditentukan tegangan kerja yangTombolInputOCRPanelMonitoring&Rang. tenaga3.1Tabel 3.1 Spesifikasi Motor Induksi Tiga Fasa dan Generator DC PenguatanTerpisahMotor Induksi Tiga FasaGenerator DC Penguatan TerpisahTegangan Output: 380 / 220 VDaya: 1 HPTegangan Medan: 198 VDCArus: 2,0 / 3,45 A: 190 VDCDaya: 1 HP / 0,75 KW Tegangan JangkarFrame: 90 BRpm: 1380Tahun: 1994Frekuensi: 50 Hz: 1750Merk: MEZ MohelniceRpm 1220v2w2380RSTMakalah Seminar Tugas Akhir – Reza FakhrizalPFR
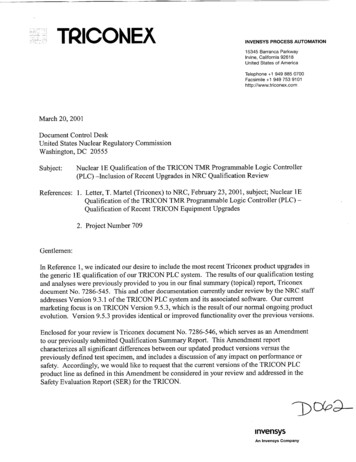
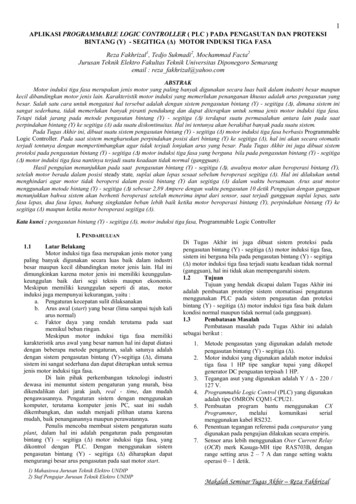
6tombol gangguan ditekan. Pilihan pertama, apabila yangditekan adalah tombol gangguan suplai lepas, maka motorGambar 3.4 Diagram pengawatan rangkaian tenagainduksi kembali ke keadaan siap dinyalakan atau dalamDari gambar 3.4 dapat dijelaskan, K1 merupakankeadaan mati. Apabila yang ditekan tombol gangguan 1 fasakontaktor yang berfungsi sebagai tanda kalau motor siaplepas, maka PLC akan menunggu masukan dari PFR untukdioperasikan, dengan kata lain motor dalam keadaan standby.mematikan motor induksi, bila tidak maka apakah yangK2 merupakan kontaktor yang digunakan saat simulasiditekan tombol gangguan 2 fasa lepas, bila iya maka PLCgangguan suplai lepas, K3 digunakan pada saat simulasiakan menunggu masukan dari PFR untuk mematikan motorgangguan dua fasa lepas, K4 digunakan pada gangguan satuinduksi. Apabila gangguan berupa tombol gangguan hubungfasa lepas, K5 digunakan untuk gangguan hubung singkat,singkat yang ditekan, maka PLC akan menunggu masukanKΔ digunakan saat motor akan beroperasi dalam keadaan Δdari OCR untuk mematikan motor induksi, bila tidak maka(segitiga) dan KY digunakan saat motor beroperasi dalamPLC akan mematikan motor induksi. Apabila mempunyaikeadaan Y (bintang).logika ’1’ maka motor akan beroperasi dalam kondisi Δ.Sedangkan bila mempunyai logika ’0’ maka motor induksi3.2.3 Perancangan Panel Monitoringakan dalam kondisi siap dinyalakan. Setelah motor induksiPerancangan Panel Monitoring diperlihatkan padaberoperasi Δ terdapat 2 pilihan, apakah tombol gangguangambar 3.5.Δditekan. Pilihan pertama, apabila yang ditekan adalah tombolgangguan suplai lepas, maka motor induksi kembali kekeadaan siap dinyalakan atau dalam keadaan mati. Apabilayang ditekan tombol gangguan 1 fasa lepas, maka PLC akanY menunggu masukan dari PFR untuk mematikan motorinduksi, bila tidak maka apakah yang ditekan tombolgangguan 2 fasa lepas, bila iya maka PLC akan menunggumasukan dari PFR untuk mematikan motor induksi. Apabilagangguan berupa tombol gangguan hubung singkat yangditekan, maka PLC akan menunggu masukan dari OCR untukmematikan motor induksi, bila tidak maka PLC akanmematikan motor induksi. Apabila dalam keadaan beroperasiGambar 3.5 Panel MonitoringΔ, motor induksi mendapatkan beban yang berlebih, makaPanel monitoring bertujuan untuk memudahkanPLC akan mendapat masukan dari TOR untuk mematikanpengamatan ketika proses sedang berlangsung. Lampu hijaumotor induksi. Proses akan berhenti jika tombol stop ditekan.digunakan sebagai indikator bila kontaktor yang terhubungFlowchart dari program dapat dilihat pada Gambardengan lampu tersebut aktif, sedangkan lampu merah3.6.digunakan sebagai indikator operasi motor, baik ketika dalamkeadaan normal maupun terjadi DBYSUPLAI LEPASK2U1HUBUNG SINGKATOVERLOAD1 FASA LEPASRESET2 FASA LEPASSTOP3.3Perancangan ProgramPenjelasan dari flowchart program adalah sebagaiberikut, pada saat motor induksi siap dinyalakan terdapat 2pilihan, yaitu apakah tombol start ditekan. Pilihan pertamatombol start tidak ditekan, maka motor induksi tidak akanbekerja dan menunggu sampai tombol start ditekan. Pilihankedua tombol start ditekan, maka motor induksi siapdioperasikan. Lalu terdapat pilihan lagi yaitu apakah tombolY – Δ normal ditekan. Pilihan pertama tombol Y – Δ normaltidak ditekan, maka motor induksi dalam kondisi siap untukdioperasikan. Pilihan kedua tombol Y – Δ normal ditekan,maka motor induksi akan beroperasi dalam keadaan Y selaman detik. Pada saat motor induksi beroperasi dalam keadaan Y,terdapat 2 pilihan, apakah tombol gangguan ditekan. Pilihanpertama, apabila yang ditekan adalah tombol gangguan suplailepas, maka motor induksi kembali ke keadaan siapdinyalakan atau dalam keadaan mati. Apabila yang ditekantombol gangguan 1 fasa lepas, maka PLC akan menunggumasukan dari PFR untuk mematikan motor induksi, bila tidakmaka apakah yang ditekan tombol gangguan 2 fasa lepas, bilaiya maka PLC akan menunggu masukan dari PFR untukmematikan motor induksi. Apabila gangguan berupa tombolgangguan hubung singkat yang ditekan, maka PLC akanmenunggu masukan dari OCR untuk mematikan motorinduksi, bila tidak maka PLC akan mematikan motor induksi.Pilihan kedua adalah, PLC menunggu selama n detikmasukan dari driver transistor. Dalam proses menunggumasukan dari driver transistor terdapat 2 pilihan, apakahMakalah Seminar Tugas Akhir – Reza Fakhrizal
7dan PLC, terlihat bahwa tegangan pada power supplymengalami penurunan. Hal ini karena adanya pembebananoleh rangkaian kontrol motor induksi dan PLC. Namunpenurunan tegangan ini masih dalam toleransi, sehinggamasih dapat menyuplai rangkaian kontrol motor induksi danPLC dengan baik.4.1.2 Pengujian Input dan Output PLCPengujian terhadap input dan output PLC dilakukandengan cara mengukur tegangan yang merupakan teganganDC. Hasil pengujian ditunjukkan pada Tabel 4.2 sebagaiberikut.Tabel 4.2 Hasil pengujian input dan output PLCPLCTegangan yangdibutuhkanInputOutputTegangan hasilpengukuran24 Volt23.94 Volt220 Volt235.4 Volt12 Volt11.97 VoltDari hasil pengujian pada Tabel 4.2, didapat bahwaterdapat perbedaan antara tegangan yang dibutuhkan dengantegangan hasil pengukuran yang digunakan untuk menyuplaiinput dan output PLC. Namun perbedaan tegangan ini masihdalam toleransi, sehingga masih dapat digunakan untuk inputdan output PLC dengan baik.Gambar 3.6 Flowchart programIV. PENGUJIAN DAN ANALISAPengujian dan analisa yang dilakukan dalam TugasAkhir ini adalah pengujian terhadap hardware, software dankerja rangkaian kontrol motor induksi.4.1Pengujian HardwarePengujian hardware meliputi pengujian power supply,input dan output PLC, input sensor F to V, input pengkondisisinyal serta input dan tegangan pembanding comparator.4.1.1 Pengujian Power SupplyPengujian terhadap power supply dilakukan dengancara mengukur tegangan keluaran yang merupakan teganganDC. Pengukuran dilakukan dengan 2 kondisi yaitu kondisisaat power supply terpisah dengan rangkaian kontrol motorinduksi dan PLC serta saat power supply dihubungkandengan rangkaian kontrol motor induksi dan PLC. Hasilpengujian ditunjukkan pada Tabel 4.1 sebagai berikut.Tabel 4.1 Hasil pengujian power supplyPower supplySaat terpisah denganrangkaian kontrol motorinduksi dan PLCSaat terhubung denganrangkaian kontrol motorinduksi dan PLC24 Volt15 Volt-15 Volt12 Volt5 Volt23.95 Volt15.10 Volt-15.68 Volt11.98 Volt5.103 Volt23.87 Volt15.05 Volt-15.90 Volt11.89 Volt5.098 VoltDari hasil pengujian pada Tabel 4.1, didapat bahwapower supply tersebut dapat digunakan untuk menyuplairangkaian kontrol motor induksi dan PLC. Pada saat powersupply terhubung dengan rangkaian kontrol motor induksi4.1.3 Pengujian Tegangan Input Sensor Frequency toVoltage (F to V)Pengujian terhadap input sensor frequency to voltage(F to V) dilakukan dengan cara mengukur tegangan yangmerupakan tegangan DC.Hasil pengujian ditunjukkan pada Tabel 4.3 sebagaiberikut :Tabel 4.3 Hasil pengujian tegangan input transmitter sensor frequency tovoltage (F to V)F to VTegangan yangTegangan hasildibutuhkanpengukuranInput12 Volt11.98 VoltDari hasil pengujian pada Tabel 4.3, didapat bahwaterdapat perbedaan antara tegangan yang dibutuhkan dengantegangan hasil pengukuran yang digunakan untuk menyuplaiinput frequency to voltage (F to V). Namun perbedaantegangan ini masih dalam toleransi, sehingga masih dapatdigunakan untuk input frequency to voltage (F to V) denganbaik.4.1.4 Pengujian Tegangan Input Pengkondisi SinyalPengujian
Pada Tugas Akhir ini, dibuat suatu sistem pengasutan bintang (Y) - segitiga (Δ) motor induksi tiga fasa berbasis Programmable Logic Controller. Pada saat sistem mengharuskan perpindahan posisi dari bintang (Y) ke segitiga (Δ), hal ini akan secara otomatis terjadi tentunya dengan mempertimbangkan agar tidak terjadi lonjakan arus yang besar.