Transcription
Classical Differential GeometryPeter Petersen
PrefaceThis is an evolving set of lecture notes on the classical theory of curves andsurfaces. Pictures will be added eventually. I recommend people download 3DXplorMath to check out the constructions of curves and surfaces with this app. Itcan also be used to create new curves and surfaces in parametric form. Other usefuland free apps are Geogebra, Grapher (on Mac), and WolframAlpha.At a minimum a one quarter course should cover sections 1.1, 1.2, 1.3, 2.1, 3.1,3.2 and chapters 4, 5. In a semester course it’d be possible to cover more fromchapter 2 and also delve into chapter 6. Chapters 6 and 7 can be covered in asecond quarter class. Note that section 2.2 is a necessary prerequisite for provingthe general Gauss-Bonnet in section 6.5.An excellent reference for the classical treatment of differential geometry is thebook by Struik [2]. The more descriptive guide by Hilbert and Cohn-Vossen [1] isalso highly recommended. This book covers both geometry and differential geometry essentially without the use of calculus. It contains many interesting results andgives excellent descriptions of many of the constructions and results in differentialgeometry.This text is fairly classical and is not intended as an introduction to abstract2-dimensional Riemannian geometry. In fact we do not discuss covariant differentiation or parallel translation. Most proofs are local in nature and try to use onlybasic linear algebra and multivariable calculus. The only sense in which the text ismore modern is in not using the language of differentials and infinitesimals as mostof the classical texts do.Some standard topics are not covered in the text. However, I hope most ofthem can be found among the exercises. As such, they can easily be incorporatedinto lectures as the instructor sees fit.I’d like to thank Chadwick Sprouse and Michael Williams for trying out thesenotes and providing valuable feedback.“Reading your notes is like reading poetry, and I don’t understand that either.” Reed Douglas, UCLA student.i
ContentsPrefaceiChapter 1. General Curve Theory1.1. CurvesExercises1.2. Arclength and Linear MotionExercises1.3. CurvatureExercises1.4. Integral CurvesExercises1110141922262934Chapter 2. Planar Curves2.1. The Fundamental EquationsExercises2.2. The Rotation IndexExercises2.3. Three Interesting ResultsExercises2.4. Convex CurvesExercises373740444850555658Chapter 3. Space Curves3.1. The Fundamental EquationsExercises3.2. Characterizations of Space CurvesExercises3.3. Closed Space CurvesExercises61616669717477Chapter 4. Basic Surface Theory4.1. SurfacesExercises4.2. Tangent Spaces and MapsExercises4.3. The First Fundamental FormExercises4.4. Special Maps and r 5. Curvature of Surfaces108ii
CONTENTS5.1. Curves on SurfacesExercises5.2. The Gauss and Weingarten Maps and EquationsExercises5.3. The Gauss and Mean CurvaturesExercises5.4. Principal CurvaturesExercises5.5. Ruled Chapter 6. Surface Theory6.1. Generalized and Abstract SurfacesExercises6.2. Curvature on Abstract SurfacesExercises6.3. The Gauss and Codazzi EquationsExercises6.4. The Gauss-Bonnet TheoremExercises6.5. Topology of SurfacesExercises6.6. Closed and Convex 190192Chapter 7. Geodesics and Metric Geometry7.1. GeodesicsExercises7.2. Mixed PartialsExercises7.3. Shortest CurvesExercises7.4. Short Geodesics7.5. Distance and CompletenessExercises7.6. IsometriesExercises7.7. Constant Curvature7.8. Comparison hapter 8. Riemannian Geometry224Appendix A. Vector CalculusA.1. Vector and Matrix NotationA.2. GeometryA.3. Geometry of Space-TimeA.4. Differentiation and IntegrationA.5. Differential Equations229229231232232233Appendix B. Special Coordinate Representations239
CONTENTSB.1.B.2.B.3.B.4.B.5.B.6.B.7.Cartesian and Oblique CoordinatesSurfaces of RevolutionMonge PatchesSurfaces Given by an EquationGeodesic CoordinatesChebyshev NetsIsothermal CoordinatesBibliographyiv239239242243245246247250
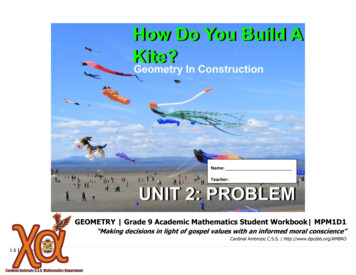
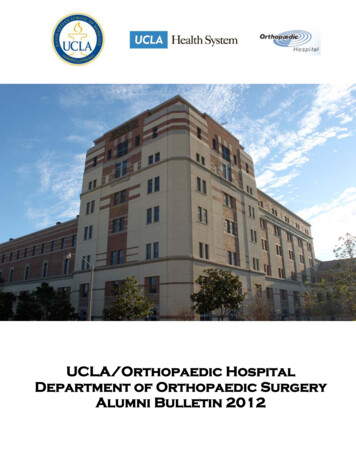
CHAPTER 1General Curve TheoryOne of the key aspects in geometry is invariance. This can be somewhat difficultto define, but the idea is that the properties or measurements under discussionshould be described in such a way that they they make sense without referenceto a special coordinate system. This idea has been a guiding principle since theancient Greeks started formulating geometry. We’ll often take for granted that wework in a Euclidean space where we know how to compute distances, angles, areas,and even volumes of simple geometric figures. Descartes discovered that thesetypes of geometries could be described by what we call Cartesian space throughcoordinatizing the Euclidean space with Cartesian coordinates. This is the generalapproach we shall use, but it is still worthwhile to occasionally try to understandmeasurements not just algebraically or analytically, but also purely descriptively ingeometric terms. For example, how does one define a circle? It can defined as aset of points given by a specific type of equation, it can be given as a parametriccurve, or it can be described as the collection of points at a fixed distance from thecenter. Using the latter definition without referring to coordinates is often a veryuseful tool in solving many problems.1.1. CurvesThe primary goal in the geometric theory of curves is to measure their shapesin ways that do not take in to account how they are parametrized or how Euclideanspace is coordinatized. However, it is generally hard to measure anything withoutcoordinatizing space and parametrizing the curve. Thus the idea will be to see ifsome sort of canonical parametrization might exist and secondly to also show thatour measurements can be defined using whatever parametrization the curve comeswith. We will also try to make sure that our formulas do not necessarily referto a specific set of Cartesian coordinates. To understand more general types ofcoordinates requires quite a bit of work and this will not be done until we introducesurfaces later in these notes.Imagine traveling in a car or flying an airplane. The route traveled will trace acurve. You can easily keep track of time and distance traveled. The goal of curvetheory is to decide what further measurements are needed to retrace the precisepath traveled. Clearly one must also measure how one turns and that becomes theimportant thing to describe mathematically.The fundamental dynamical vectors of a curve whose position is denoted by q23are the velocity v ddtq , acceleration a ddt2q , and jerk j ddt3q .The tangent line to a curve q at q (t) is the line through q (t) with directionv (t). The goal is to find geometric quantities that depend on velocity (or tangent1
1.1. CURVES2lines), acceleration, and jerk that completely determine the path of the curve whenwe use some parameter t to travel along it.Tangent LinejvaqMost of the curves we study will be given as parametrized curves, i.e.,23x (t)67q (t) 4 y (t) 5 : I ! Rn ,.where I R is an interval. Such a curve might be constant, which is equivalent toits velocity vanishing everywhere.Definition 1.1.1. A curve is called regular if it is never stationary. In otherwords, the speed is always positive, or the velocity never vanishes.Occasionally curves are given to us in a more implicit form. They could comeas solutions to first order differential equationsdq F (q (t) , t) .dtIn this case we obtain a unique solution (also called an integral curve) as long aswe have an initial position q (t0 ) q0 at some initial time t0 . In case the functionF (q) only depends on the position we can visualize it as a vector field as it givesa vector at each position. The solutions are then seen as curves whose velocity ateach position q is the vector v F (q).Very often the types of differential equations are of second (or even higherorder) d2 qdq F q (t) ,,t .dt2dtIn this case we have to prescribe both the initial position q (t0 ) q0 and velocityv (t0 ) v0 in order to obtain a unique solution curve.The next result shows how differential equations can be used to characterizecurves.Proposition 1.1.2. The following conditions are equivalent for a regular curveq (t):(1) The curve travels along a line: q (t) q0 (t) v0 , where (t) is a scalarvalued function and q0 , v0 are fixed vectors.(2) The velocities are all parallel to each other: v (t) (t) v0 , where (t) isa scalar valued function and v0 is a fixed vector.
1.1. CURVES3(3) The velocity and acceleration at each point are parallel to each other:a (t) (t) v (t), where (t) is a scalar valued function.Proof. (1) ) (2): Use (t) (t). (2) ) (3): Since the curve is regular (t) 6 0. Thus we can use (t) (t)(t) .(3) ) (1): The equation a (t) (t) v (t) can be written as a differentialequationdv (t) v .dtThis shows that Z t v (t) v (t0 ) exp,t0since the right hand side solves the equation and has the same initial value at t0 asthe left hand side. Thus we obtain a new differential equationdq (t) v0 ,dt R twhich shows that q (t) q (t0 ) v0 t0 , since the right hand side solves theequation and has the same initial value at t0 as the left hand side. Proposition 1.1.3. Let c (t) , c (t) : I ! Rk be two vector valued curves.(1)(2)(3)(4)d(c·c )dcdc dt dt · c c · dt .2d1 c · ċ.dt 2 c dc·ċ as long as c 6 0.dt ( c ) c d1c·ċas long as c 6 dt c c 30.Proof. (1) follows from the product rule for differentiation.2(2) follows by using (1) with c c and that c c · c. (3) follows from (2) by observing that we also have dd1dt ( c )(4) follows from (3) by using dt. c c 2ddt12 c 2 c d c dt . Remark 1.1.4. The proposition will be used freely throughout the text. It isimportant to observe that the curves c or c could be the velocity or accelerationof a curve q. For example, if a curve q has the property that its velocity always hasunit length, then v 1 and (2) shows that v · a 0.Another very general method for generating curves is through equations. Ingeneral, one function F (x, y) : R2 ! R gives a collection of planar curves via thelevel setsF (x, y) c.The implicit function theorem guarantees us that we get a unique curve as a graphover either x or y when the gradient of F doesn’t vanish. The gradient is the vector @F@xrF @F.@y
1.1. CURVES4Geometrically the gradient is perpendicular to the level sets. This means that thelevel sets themselves have tangents that are given by the directions @F@y@F@xas this vector is orthogonal to the gradient. This in turn offers us a different way offinding these levels as they now also appear as solutions to the differential equation dx @F@y (x (t) , y (t))dt .dy@Fdt@x (x (t) , y (t))In three variables we need two functions as such functions have level sets that aresurfaces:F1 (x, y, z) c1 ,F2 (x, y, z) c2 .In this case we also have a differential equation approach. Both of the gradients rF1and rF2 are perpendicular to their level sets. Thus the cross product rF1 rF2is tangent to the intersection of these two surfaces and we can describe the curvesas solutions todq (rF1 rF2 ) (q) .dtIt is important to realize that when we are looking for solutions to a first ordersystemdq F (q (t)) ,dtthen we geometrically obtain the same curves if we considerdq (q (t)) F (q (t)) ,dtwhere is some scalar function, as the directions of the velocities stay the same.However, the parametrizations of the curves will change.Classically curves were given descriptively in terms of geometric or even mechanical constructions. Thus a circle is the set of points in the plane that all have afixed distance R to a fixed center. It became more common starting with Descartesto describe them by equations. Only about 1750 did Euler switch to consideringparametrized curves. It is also worth mentioning that what we call curves usedto be referred to as lines. This terminology still appears in certain concepts weintroduce later, such as lines of curvature on a surface. However, when we refer toa line in these notes we mean a straight line.We present a few classical examples of these constructions in the plane.Example 1.1.5. Consider the equationF (x, y) x2 y 2 c.pWhen c 0 this describes a circle of radius c. When c 0 we only get the origin,while when c 0 there are no solutions. The gradient is given by (2x, 2y) and onlyvanishes at the origin.The differential equation describing the level sets is dx 2ydt .dy2xdt
1.1. CURVES5The solutions are given by q (t) R (cos (2 (t ')) , sin (2 (t '))) where the constants R and ' can be adjusted according to any given initial position. A moreconvenient parametrization happens when we scale the system to become dx ydt dyxdtso that the solutions are q ( ) R (cos ( ') , sin ( ')) with being the angleto the x-axis. Yet a further scaling is possible as long as we exclude the origin dx 1ydtp. dy2 y2xxdtThis time the solutions are given by ' 'q ( ) R cos, sinRRand we have to assume that R 0.Example 1.1.6. ConsiderF (x, y) x2y 2 c.When c 6 0 the solution set consists of two hyperbolas. They’ll be separated bythe y-axis when c 0 and by the x-axis when c 0. When c 0 the solution setconsists of the two lines y x. A tangent direction is given by (2y, 2x), whichwe observe only vanishes at the origin. Unlike the above example we seem to havea valid level set passing through the origin, however, it consists of two curves thatpass through the point of contention.A nicely scaled differential equation describing these curves is given by dx ydt dyxdtand the solutions are given by xy aet beaet bett,where a, b can be adjusted according to the initial values. There are five separatesolutions that together give us the level set x2 y 2 0. We get the origin whena 0, b 0. The two parts of y x when b 0 with the part in the first quadrantwhen a 0 and in the third quadrant when a 0. The two parts of y xsimilarly come from a 0.
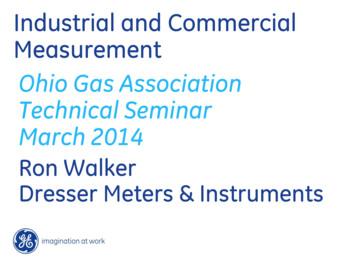
1.1. CURVES6Example 1.1.7. Consider the second order equationd2 q 0.dt2The solutions are straight lines q (t) q0 v0 (tt0 ).The next two examples show that scaling second order equations can, in contrast to first order equations, change the solutions drastically.Example 1.1.8. The first example is given by the harmonic oscillatord2 q q.dt2This is easy to solve if we look at each coordinate separately. The solutions are:q (t) q0 cos (tt0 ) v0 sin (tt0 ) .Example 1.1.9. A more subtle differential equation comes from Newton’s inverse square law:d2 qq1 q g 3 g 2 .dt2 q q q The solutions are conic sections. This is discussed in section 1.4 and the conicsections are defined in the next example.Example 1.1.10 (Conic Sections). A conic section is the curve that resultsfrom intersecting a cone with a plane. It can be a point, two lines, circles, ellipses,parabolas, or hyperbolas. Shining a flash light at a wall at different angles willyield contour shapes that are conic sections. A point or two lines only occur whenthe plane goes through the vertex of the cone. In all other cases we obtain thenon-degenerate conic sections that are ellipses, parabolas, or hyperbolas.Here we offer another classical definition that is strictly planar. A conic sectionis determined by a focal point f 2 R2 , a line l, and an eccentricity e 0. The curveis defined as the points q whose distance to f is e times the distance to l. Whenf 0 is at the origin the curve is given by the equation q e (q · n q) ,where n is a unit normal to l and q · n q measures the distance from q to the linel. We can rewrite this as q q · k p.Below is a picture of several conic sections with the same p. Note that the hyperbolahas both of its branches.
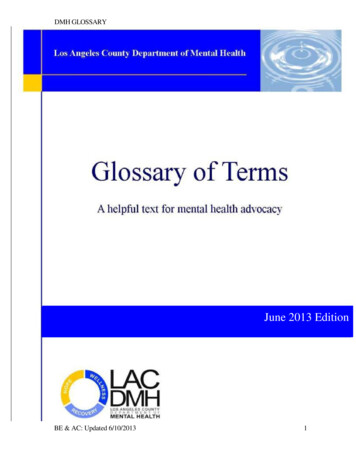
1.1. CURVES7To convince ourselves that this really yields conic sections we further assumethat the coordinate axes are rotated so that k (e, 0). The line is then given byx pe . The equation in Cartesian coordinates now becomespx2 y 2 ex p.This can be rewritten as1e2 x22epx y 2 p2 .When e 1 this gives a sideways parabola. When e 6 1 we can further rewrite itas 2x 1 epe2y2 2 p2 1.p1 e21 e2When e 0, this is the equation for a circle centered at the origin with radiusp. When 0 e 1 it becomes an ellipse with major axis a 1 pe2 , minor axis 2b p1p e2 , and center 1 epe2 , 0 . Finally when e 1 it is a hyperbola as 1 p e2 0.In polar coordinates the equation takes the simple formr er cos porr (1e cos ) p.Example 1.1.11. Finally we mention a less well known ancient example. Thisis the conchoid (shell-like) of Nicomedes. It is given by a quartic (degree 4) equation:x2 y 2 (yb)2R2 y 2 0.Descriptively it consists of two curves that are given as points (x, y) whose distancealong radial lines to the line y b is R. The radial line is simply the line thatpasses through the origin and (x, y). So we are measuring the distance from (x, y)to the intersection of this radial line with the line y b. As that intersection isxy b, b the condition is xxby 2 (y2b) R2 ,which after multiplying both sides by y 2 reduces to the above equation.The two parts of the curve correspond to points that are either above or belowy b. Note that no point on y b solves the equation as long as b 6 0.A simpler formula appears if we use polar coordinates. The line y b isdescribed asb(x, y) (b cot , b) (cos , sin )sin and the point (x, y) by b(x, y) R (cos , sin ) .sin This gives us a natural parametrization of these curves.
1.1. CURVES8y bR bR bFigure 1.1.1. ConchoidsAnother parametrization is obtained if we intersect the curve with the linesy tx and use the slope t instead of the angle as the parameter. This correspondsto t tan in polar coordinates. Thus we obtain the parameterized form bR(x, y) p(1, t) .t1 t2As we have seen, what we consider the same curve might have several differentparametrizations.There is also a way of characterizing curves that are radial lines. We offertwo proofs that highlight some of the characterizations of curves that we have seenabove.Proposition 1.1.12. If the velocity is always radial relative to a point c, thenthe curve lies on a line through c.Proof. The condition tells us that the curve satisfies a differential equationof the formv (t) (t) (q (t)c) .A solution to the this equation with q (t0 ) q0 is given by Z t q (t) (q0 c) exp c.t0By uniqueness of solutions this is also the only such solution.Alternately we can characterize radial curves as curves whereq (t) q (t)cc
1.1. CURVES9is constant. Note that this can be written as an equation. When we assumev (t) (t) (q (t) c) the derivative of this ratio isd q (t)dt q (t)cc v (t) q (t) c (t) 0.(q (t)q (t) q (t)cc q (t) q (t)is constant when the velocity is radial.cc c)(q (t)(q (t)c) · v (t)3 q (t) c (t)c) q (t) c Thus Definition 1.1.13. Two parametrized curves q (t) and q (t ) are reparametrizations of each other if it is possible to write t t (t ) as a function of t and t t (t)such thatq (t) q (t (t)) and q (t (t )) q (t ) .If both of the functions t (t ) and t (t) are differentiable, then it follows from thechain rule thatdt dt 1.dt dtIn particular, these derivatives never vanish and have the same sign. We shall almostexclusively consider such reparametrizations. In fact we shall usually assume thatthese derivatives are positive so that the the direction of the curve is preservedunder the reparametrization.Lemma 1.1.14. If q (t ) q (t (t )) and t (t ) is differentiable with positivederivative, then q is a reparametrization of q.Proof. The missing piece in the definition of reparametrization is to showthat we can also write t as a differentiable function of t. However, by assumptiondt dt 0 so the function t (t ) is strictly increasing. This means that for a givenvalue of the function there is at most one point in the domain yielding this value(horizontal line test). This shows that we can find the inverse function t (t).Graphically, simply take the graph of t (t ) and consider its mirror image reflectedin the diagonal line t t . This function is also differentiable with derivative att t0 is given by1.dt dt (t (t0 )) It is generally too cumbersome to use two names for curves that are reparametrizations of each other. Thus we shall simply write q (t ) for a reparametrization ofq (t) with the meaning being thatq (t) q (t (t)) and q (t (t )) q (t ) .With that in mind we shall always think of two curves as being the same ifthey are reparametrizations of each other.
EXERCISES10Definition 1.1.15. We say that a curve q : I ! Rk is closed if there is aninterval [a, b] I such that q (a) q (b) and q (I) q ([a, b]). We say that a closedcurve is simple if it is regular and [a, b] can be chosen so that q : [a, b) ! Rk isone-to-one.Example 1.1.16. A circle (cos t, sin t) is a simple closed curve where we canuse the interval [a, 2 a] for any a.Example 1.1.17. The figure “1” is an example of a curve that is closed, butnot simple. It can be described by an equation1x2 x2 y 2 .Note that as the right hand side is non-negative it follows that x2 1. Whenx p1, 0, 1 we get that y 0. For other values of x there are two possibilities fory (1 x2 ) x2 .Exercises(1) Show that if a curve q satisfies q (t) R for all t and a constant R, thenq · v 0.(2) Show that the following properties for a regular curve are equivalent.(a) The curve is part of a straight line(b) All its tangent lines are parallel.(c) All its tangent lines pass through a fixed point c.(3) Show that lines in the plane satisfy equations of the form r cos ( 0 ) r0 inpolar coordinates. Describe what the two constants 0 , r0 mean.(4) Show that three points that don’t lie on a line determine a unique conic sectionwith focus at the origin.(5) Show that a curve q (t) : I ! R2 lies on a line if and only if there is a vectorn 2 R2 such that q (t) · n is constant.(6) Show that for a curve q (t) : I ! R3 the following properties are equivalent:(a) The curve lies in a plane.(b) There is a vector n 2 R3 such that q (t) · n is constant.(c) There is a vector n 2 R3 such that v (t) · n 0 for all t.(7) Show that a curve q (t) : I ! R3 lies on a line if and only if there are twolinearly independent vectors n1 , n2 2 R3 such that q (t) · n1 and q (t) · n2 areconstant.(8) Show that if a curve q (t) : I ! R3 satisfies q 0 on I, then it lies in a plane.n(9) Show that for a curve q (t) : I ! R the following properties are equivalent.(a) The curve lies on a circle (n 2) or sphere (n 2.)
EXERCISES11(b) There is a vector c such that q c is constant.(c) There is a vector c such that (q c) · v 0.(10) Consider a curve q (t) : I ! Rn and fix t0 2 I. Show that the curve lies on acircle (n 2) or sphere (n 2) if and only if the curveq (t) q (t)q (t0 ) q (t)q (t0 ) 2lies on a line (n 2) or hyperplane (n 2). Hint. The hyperplane is given bythe points x that satisfy:(q (t0 )c) · x 1,2where c is the center of the sphere.(11) Consider a curve of the form q ( ) r ( ) (cos , sin ) where r is a function ofboth cos and sin r ( ) p (cos , sin ) .(a) Show that this curve is closed.(b) Show that if r ( ) 0, then it is a regular and simple curve.(c) Let 0 1 2 2 and 2 6 1 . Show that if r ( 1 ) r ( 2 ) 0,ṙ ( 1 ) 6 0 6 ṙ ( 2 ), then it is not simple. In case 2 1 the curve isnot simple as long as ṙ ( 1 ) 6 ṙ ( 2 ).(d) Show that if r ( 0 ) ṙ ( 0 ) 0, then its velocity vanishes at 0 .(e) By adjusting a in r ( ) 1 a cos give examples of curves that satisfythe conditions in (b), (c), and (d).(12) Consider a curve of the form q (t) x (t) (1, t).(a) Show that v (ẋ, x tẋ).(b) Show that if x (t0 ) ẋ (t0 ) 0, then its velocity vanishes at t0 .(c) By adjusting a ina t2x (t) 1 t2give examples of curves that are not regular.(13) Consider a curve in R2 whose velocity never vanishes and intersects all the radiallines from the origin at a constant angle 0 . These are also called loxodromes.Determine what this curve must be if 0 0 or 2 . Show that logarithmicspiralsq (t) aebt (cos t, sin t)have this property.(14) Show that if we parametrize the spherex2 y 2 z 2 R 2byxy R sin cos ,R sin sin ,z R cos ,then great circles satisfy tan cos ( 0 ) tan 0 . A great circle is the intersection of the sphere with a plane ax by cz 0 through the origin.
EXERCISES12(15) Show that the two equationsx2 y 2 z 2(x2R) y 2 4R2 , R2define a closed space curve that intersects itself at x 2R by showing that itcan be parametrized as tq (t) R cos (t) 1, sin (t) , 2 sin.2(16) The cissoid (ivy-like) of Diocles is given by the equationx x2 y 2 2Ry 2 .(a) Show that this can always be parametrized by y, but that this parametrization is not smooth at y 0. Hint: A cubic equation ax3 bx2 cx d 0has a unique root if the derivative of the left hand side is positive.(b) Show that if y tx, then we obtain a parametrization(x, y) 2Rt2(1, t) .1 t2(c) Show that in polar coordinates 1r 2Rcos cos .(17) The folium (leaf ) of Descartes is given by the equationx3 y 33Rxy 0.In this case the curve really does describe a leaf in the first quadrant.(a) Show that it can not be parameterized by x or y near the origin.(b) Show that if y tx, then we obtain a parametrization3Rt(1, t)1 t3that is valid for t 6 1. What happens when t (c) Show that in polar coordinates we have(x, y) r 1?3R sin cos .sin3 cos3 (18) Given two planar curves q1 and q2 we can construct a cissoid q as follows: Assume that the line y tx intersects the curves in q1 (x1 (t) , tx1 (t)) and q2 (x2 (t) , tx2 (t)), then define q (t) x (t) (1, t) so that q (t) q1 (t) q2 (t) .(a) Show that x (t) (x1 (t) x2 (t)).
EXERCISES13(b) Show that the conchoid of Nicomedes is a cissoid. Hint: q1 is a circleof radius R centered at the origin and q2 the line y b. However, theparametrization of the circle is so that it is its lower half that gives theupper part of the conchoid.(c) Show that the folium of Descartes is a cissoid. Hint: Use an ellipsex2xy y 2 R (x y)and linex y R.(19) Let q be a cissoid where q1 is the circle of radius R centered at (R, 0) and q2a vertical line x b.(a) Show that when b 2R we obtain the cissoid of Dioclesx x2 y 2 2Ry 2 .
1.2. ARCLENGTH AND LINEAR MOTION(b) Show that when b R214we obtain the trisectrix (trisector) of Maclaurin2x x2 y 2 R 3x2y2 .(c) Show that when b R we obtain a strophoidy 2 (Rx) x2 (x R) .(d) Show that the change of coordinates x u v, y trisectrix of Maclaurin into Descartes’ folium.p3 (uv) turns the1.2. Arclength and Linear MotionThe arclength is the distance traveled along the curve. One way of measuringthe arclength geometrically is by imagining the curve as a thread that can bestretched out and measured. This, however, doesn’t really help in formulating howit should be measured mathematically. Archimedes succeeded in understanding thearclength of circles by relating it to the area of the circle. The idea of measuringthe length of general curves is relatively recent, going back only to about 1600.Newton was the first to give the general definition that we shall use below. As weshall quickly discover, it is generally impossible to calculate the arclength of a curveas it involves finding anti-derivatives of fairly complicated functions.From a dynamical perspective the change in arclength measures how fast themotion is along the curve. So if there is no change in arclength, then the curveis stationary, i.e., you stopped. More precisely, if the distance traveled is denotedby s (we can’t use d for distance as it is used for differentiation), then the relativechange with respect to the general parameter is the speeddsdq v .dtdtThis means that s is the anti-derivative of speed and is defined up to an additiveconstant. The constant is determined by where we start measuring from. Thismeans that we should define the length of a curve on [a, b] as followsZ bbL (q)a v dt s (b) s (a) .aUsing substitution this is easily shown to be independent of the parameter t as longas the reparametrization is in the same direction. One also easily checks that acurve on [a, b] is stationary if and only if its speed vanishes on [a, b]. We usuallysuppress the interval and instead simply write L (q).Example 1.2.1. If q (t) q0 v0 t is a straight line, then its speed is constant v0 and so the arclength over an interval [a, b] is v0 (b a).Example 1.2.2. If q (t) R (cos t, sin t) c is a circle of radius R centered atc, then the speed is the constant R and so again it becomes easy to calculate thearclength.Example 1.2.3. Consider the hyperbola x2 y 2 1. It consists of two components separated by the y-axis. The component with x 0 can be parametrizedusing hyperbolic functions q (t) (cosh t, sinh t). The speed isppds p sinh2 t cosh2 t 2 sinh2 t 1 cosh 2t.dt
1.2. ARCLENGTH AND LINEAR MOTION15While this is both a fairly simple curve and a not terribly difficult expression forthe speed it does not appear in any way easy to find the arclength explicitly.Proposition 1.2.4. If F : Rk ! Rk is of the form F (x) Ox c, where O isan orthogonal transformation and c 2 Rk , then L (q) L (F q) for all curves.Proof. An orthogonal transformation is by definition a linear map or matrixthat preserves dot products: (Ov) · (Ow) v · w, for all v, w 2 Rk . The prooffollows from the simple observation that the differential of F is given by DF O.Using the chain ruledF q DF (q̇) O (q̇) q̇ dtit follows that F preserves the speed of q and hence also the length. Definition 1.2.5. A curve is said to be parametrized by arclength if its speedis always 1. Such a parametrizati
This book covers both geometry and differential geome-try essentially without the use of calculus. It contains many interesting results and gives excellent descriptions of many of the constructions and results in differential geometry. This text is fairly classical and is not intended as an introduction to abstract 2-dimensional Riemannian .