Transcription
Using the VEX Robotics SystemIntroduction to VEXRoboticsArchbishop McCarthy High SchoolRobotics Team 2013-2014
Types Of Control Remote Control Wireless using some type of joystick Uses radio frequencies to communicate Autonomous Performs without human guidance A computer program tells it what to do Has sensors to respond to its environment Tethered Remote but wired control
Power Our primary power source will be a battery Portable Heavy Steady DC voltageNeeds to be recharged or replacedMay need multiple batteries with differentvoltages One for propulsion and microcontroller andone for the controller (joystick)
Movement Wheels and pulleys use DC motors A DC motor continuously rotates (360⁰) Speed is controlled by the amount of DC voltage Direction is controlled by polarity of DC voltage Arms and grippers can use servo’s A servo goes to a position and holds there Typically minus 90 degrees to plus ninety degrees Position is controlled by an electronic signal
DC Motor Voltage amountgiven by pulse widthmodulation Longer “on” timemeans higher voltage Higher voltage equalshigher speed Direction of rotationcontrolled by polarity
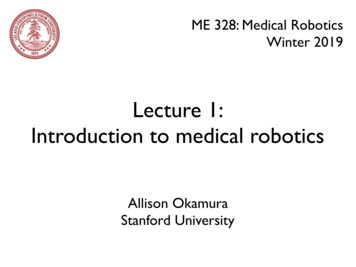
VEX Motor 2 wire motor connects directly tothe Cortex ports 1 and 10 2-Wire Motor 269 Requires a motor controller toconnect to any 3 wire port Motor Controller 29 3 wire ports produce a servotype RC signal output Ports 2-9 on the VEX Cortex
Motor Specs Free Speed: 100 rpmStall Torque: 8.6 in-lbsStall Current: 2.6AFree Current: 0.18AAll motor specifications are at 7.2 voltsCustom designed to connect to theVEX structural system Square drive shaft 2 screw connectionsNote that screw connections are 6-32, not the more common 832
Servo A servo is a motorconnected to abuilt-in electroniccontrol unit The control unitcoverts the inputsignal to a position The input signal isa form of pulsewidth modulation
More Servo’s Pulses are always 20 ms apart 50 pulses per second Pulse width varies between 1 and 2 ms 18-19 ms of “dead time” A DC motor getting this signal would spin veryslowly, if at all The pulse width determines the servo position 1 ms full ccw (usually - 90⁰) 1.5 ms middle (or null) position 2 ms full cw (usually 90⁰)
VEX Servo 3 wire servo connection Orange wire is 5 VDC power ALWAYS the middle wire Black wire is ground (0 VDC) White wire is PWM signal Connects directly to ports 29 on the VEX Cortex
Servo Specs Rotation: 100 degreesStall Torque: 6.5 in-lbsVoltage: 4.4 - 9.1 Volts Motor life will be reduced operating outsidethis range Current Draw: 20mA to 1.5 A per Servo 2 screw connections Square drive shaft Requires a clutch so gears don’t strip
VEX Cortex Controller More powerful than the PIC Advanced STMicroelectronics ARMCortex-M3 microprocessor Programmable with EasyC V4VEXnet wireless technology Ethernet communications protocol802.11 b/g USB Adapter Keys
Cortex Controller Specs Built-in VEXnet Technology Wireless driving, wireless debugging, and wirelessprogram downloading (8) standard 3-wire Motor or Servo ports(2) high current 2-wire Motor ports(8) high-res Analog Inputs, (12) fast Digital I/Os All can be used as interrupts Support for two 75 MHz transmitters and receivers Rx1 and Rx2 Ports I2C Smart Sensor Port Will connect to multiple new smart sensors in the future
VEXnet Joystick Joystickcommunicateswith Cortex controller viawireless 802-11g Two X/Y joysticks plus 12programmable buttons Ports on the back are:- Partner – phone cord toanother Joystick sharescontrol (buddy system)- Program – programmingcable from PC USB port- Competition port On/Off power switchTop view802.11 AdapterBack-side view
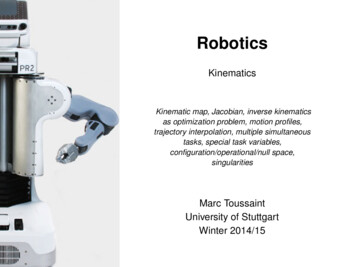
Cortex M3 VEXnet Controller802.11 AdapterTwo UART (data) portsOne 12C (sensor) port8 Analog ports12 Digital I/O ports10 motor/servo ports 2 built-in speedcontrollers 2 external speedcontrollersOn/Off SwitchBackup power port(9V battery)Rx 2Rx17.2 V battery port
Cortex Controller Wiring PlanBlack, - GndRed, 5White, control/signal- Gnd 5VRx (clock for 12CTx (Data for 12CBlack, - GndRed, White, Control/SignalTwo WireBlack –Red
Gears Gears are used for several things: To increase the speed of rotation To increase the torque, or the rotatingforce applied to a load Gears trade one for the other If you use gears to increase speed, torquewill decrease If you use gears to increase torque, speedwill decrease
More Gear Info Gears use teeth to transmit torqueTeeth must be the same size, even on differentsize gears The number of teeth varies for different sizegears A smaller gear has fewer teeth A larger gear has more teeth A big gear driving a small gear increases speedA small gear driving a big gear increases torque
Gear calculations
Structural System The structural subsystem of the robotis responsible for physical support.Holds everything in placeThe durable “skeleton” of the robot towhich all the other subsystems areattached.The Structure and Motion subsystems are tightly integratedto form the chassis of the robot.
Additional Info 2 types of screw 6-32 and 8-32 Keps nuts Square drive shaft Bearing flat Spacers and friction reducers Metal sized by number ofholes5 X 151 X 25
Programming To program the robot you need both softwareand hardwareThe software is the computer program weuse to write the program that goes into theVEXThe hardware has two pieces: The VEX controller itself The cable that connects the computer to thecontroller so you can download the program youwrite into the microcontroller
Programming The VEX Cortex isprogrammed with easyC V4 easyC uses graphics baseddrag and drop programming Includes a full C text editorfor advanced programming Download to the robotwirelessly over VEXnet ordirectly using USB
EasyC V4 The programs you write are a form of usercode called project files A robot only does what the program tells it to do Select “new project” to create a brand new program Select “open project” to open an existing project VEX includes a couple of programs built in toEasyC The default code and the test code These programs will set up or restore your robot toan “out of box” condition
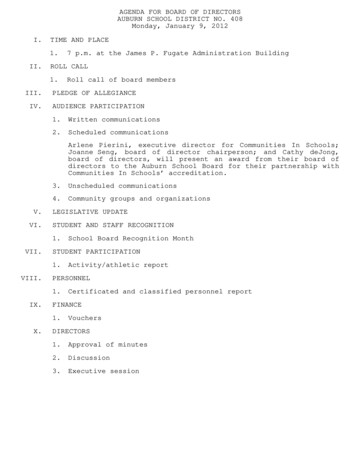
Opens IFI/IntelitekLoader windowScreenshot ofeasyC V4 startupwindow
“C” Code WindowShows code in textformatFunction Block WindowDrag and drop these into theprogramming windowBlock ProgrammingWindowShows your code in a graphic blockdiagram format
Mapping Your Robot This is the fullrange of speedcontrol for bothmotors and servo’s 127 full ccw(servo) or fullspeed reverse(motor) -127 full cw(servo) or fullspeed forward(motor) 0 null (servo) oroff (motor)
EasyC V4 The programs you write are a form of user code called project files A robot only does what the program tells it to do Select “new project” to create a brand new program Select “open project” to open an existing project VEX includes a couple of programs built in to EasyC The default code and the test