Transcription
ME 328: Medical RoboticsWinter 2019Lecture 1:Introduction to medical roboticsAllison OkamuraStanford University
About this class Teaching staffInstructor: Allison OkamuraCo-instructor for seminars: Federico BarbagliCAs: Lisa Yamada, Cole Simpson Who are you? Review course logisticsWeb pageSyllabus
To do Fill out the survey (handout) Sign up on piazza today:https://piazza.com/stanford/winter2018/me328 Enter your availability on this when2meet poll bytomorrow at 3 pm:https://www.when2meet.com/?7393949-lDcQJ
Robots are. 10 cm Accurate and precise; Untiring Smaller or larger than people(as needed) Remotely operated (as needed) Connected to computers, which givesthem access to information Not always able to operate autonomously in 1 cmhighly complex, uncertain environmentsNeed for humaninteraction
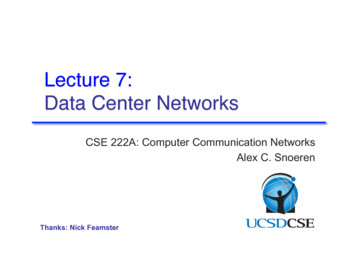
Potential Impact ofMedical RoboticsTODAY:Treatments areboth qualitatively andquantitatively limitedby human abilitieslevel ofchallengeWITH ROBOTICS:More clinicians can performmore difficult (and evennew) procedures; morepatients can berehabilitatednumber of patients treated
IntraoperativePreoperativeupdate modelcomputer-assistedplanningupdate puterassistedassessment
Surgical robotics:Giving the surgeonsuperhuman capabilities
Level of Human Input TeleoperationAutonomousDario et al.da VinciSenseiCyberKnife
STOPPED HERE
Open SurgerySurgeonPatientImage source: www.physicianphotos.com
Minimally Invasive SurgerySurgeonInstrument/CameraPatientImage source: www.womenssurgerygroup.com
Teleoperated Robot-AssistedMinimally Invasive SurgerySurgeonMaster ConsoleInformation-EnhancedRMISPatient-Side RobotInstrument/CameraPatient 2012 Intuitive Surgical, Inc.
2008 Intuitive Surgical, Inc.
Integrating ImagesLaparoscopicultrasoundintegratedwith the daVinci surgicalsystemRussell Taylor andGregory Hager (JHU)
Force Feedback for Manipulationno overlaydot overlayGraphical force feedback results in lower peakforces, lower variability of forces, and fewerbroken sutures for untrained robot-assisted surgeonsIn collaboration with D. D.Yuh of JHMI Cardiac Surgery
Force Feedback for ExplorationIn collaboration with D. D.Yuh of JHMI Cardiac Surgery and Li-Ming Su of JHMI Urology
The Sensing Challengestiffness differencesare difficult to feelthrough a rigidcontactIn collaboration with D.Yuh(JHMI Cardiac Surgery) andLi-Ming Su (JHMI Urology)stiffnessgraphicaloverlay
IntraoperativePreoperativeupdate modelcomputer-assistedplanningupdate plan. omputerassistedassessment
Modeling:Improving training andplanning (and paving theway for autonomousrobotic procedures)
From Modeling to SimulationS. DiMaio and S. E. Salcudean (University of British Columbia)
Example Commercial SimulatorsLaparoscopyEndovascularImmersion Corp.Endoscopy
Modeling Factorssimplifyingalgorithmdatarecordedreal tissuecomplextool-tissue modelForce/PositionRenderingtool-tissue modelDeveloping mechanical models from imagesIn collaboration with K. Macura(JHMI Radiology and Radiological Sciences)haptic/visualdisplayhumanEffects of materialproperties, boundaryconstraints, andgeometry
Modeling enables needle steeringrotationinsertionBicycleBicycleuse tip asymmetrysymmetricbevelpre-bent
Steering Performancedeformation1 cmteleoperationIn collaboration with N. Cowan and G. Chirikjian(JHU ME), D. Song (JHMI Radiation Oncology), M.Choti (JHMI Surgery), and K. Goldberg (UC Berkeley)
Rehabilitation Robotics:Replacing, training, orassisting to improvequality of life
Growing Healthcare ChallengesMaja Mataric (USC)
Socially Assistive RoboticsProblem: cost/population size and growth trendsNeed: personalized medium to long-term carePart of the solution: human-centered robotics toimprove health outcomes Monitoring Coaching/training Motivation Companionship/socializationRobots can be a “force multiplier” for caregivers, reducinghealth care costs and improving quality of life Maja Mataric (USC)
Movement Therapy and Assistance Over 25% of U.S. population has some functionalphysical limitation that affects normal living 6.5M people in the US have had a stroke (by 2050,cost projected to be 2.2 Trillion)
Optimizing Movement TherapyIn collaboration with A. Bastian(KKI and JHU Neuroscience)
Neurally Controlled ProsthesesJHU Applied Physics Laboratory
SafetySafety of industrial robotsis ensured by keeping humansout of the workspace.Medical robots come incontact with both patientsand clinicians/caregivers.Approaches include:- Low force and speed- Risk analysis (eliminate single points of failure)- Fault tolerance (hardware and software)- Fail safe design (system fails to a safe state)- Redundant sensingPUMA Industrial Robot
In an ideal world, medicalrobotics includes: Quantitive descriptions of patient state Use of models to plan intervention Design of devices, systems, and processes toconnect information to action ( robotics ) Incorporating human input in a natural way Goal: improve health and quality of lifeBut these are only the technical challenges.
robotics includes: Quantitive descriptions of patient state Use of models to plan intervention Design of devices, systems, and processes to connect information to action ( robotics ) Incorporating human input in a natural way Goal: improve health and quali




![Academy Cloud Foundations Course Outline [English]](/img/13/academy-20cloud-20foundations-20course-20outline-20-english.jpg)
