Transcription
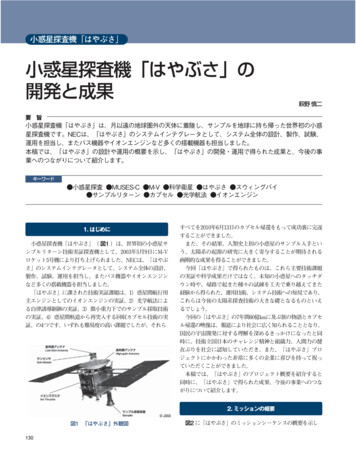
�機「はやぶさ」の開発と成果萩野 慎二要 す。キーワード 小惑星探査 MUSES-C M-V 科学衛星 はやぶさ スウィングバイ サンプルリターン カプセル 光学航法 イオンエンジン1. � 図1 について紹介します。2. ミッションの概要図1 「はやぶさ」外観図130図2 �スの概要を示し
宇宙特集表1 システム主要諸元表2 バス系サブシステム設計概要図2 �という難易度の高いものでした。3. システム設計概要3.1 全体設計「はやぶさ」は1m 1.5m の推進系(化学燃料)RCS(Reaction Control の代表的システム主要諸元を 表1 �環境条件に適合すること、2) �バス系サブシステムの設計概要を 表2 に示します。(1) た ( 図3 ) 。(2) ��れ以前のNiMH(Nickel Metal ��しました。NEC技報 Vol.64 No.1/2011 ------- 131
�機「はやぶさ」の 開発と成果図3 SSR-CV方式電源制御(3) �ンクは2 n を採用しました。(4) ��きました。(5) ��(6) �フトウェア制御のH C E (H eater C o n t ro �ことができました。動作実績例を 図4 に示します。
rt �た( 図5 ヒータ電力を削減できます。(7) イオンエンジン探査機は常に �、太陽方向と直角方向である を 写真1 �行いました。図4 �績例図5 �1 �報 Vol.64 No.1/2011 ------- 133
�機「はやぶさ」の 開発と成果3.2 示します。(1) 地球は ��テナは ��機器の詳細な搭載状況を 図6 ��を測るレーザ測距装置(LIDAR: 写真2 上述のONC-Tの他、小惑星の図6 探査機-Z面の機器実装134写真2 NIRS:Near ットマーカ(TM: 写真3 �せた状態を 写真4 ��(LRF-S1: 写真5 するため Y面に搭載されています。(2) 物のない-X面に搭載しました。
宇宙特集写真3 ターゲットマーカ(TM)写真4 TMをFLAで光らせた状態写真5 LRF-S1(左)、S2(右)4. �す。(1) ric Delta-V Earth Gravity えます。(2) のカメラ画像情報の一例を 図7 に示します。(3) � 図8 ��センシングでイトカワ表面のNEC技報 Vol.64 No.1/2011 ------- 135
�機「はやぶさ」の 開発と成果図7 �報図8 献することができました。(4) �。1) ��。2) ��を 図9 �す。(5) 、
宇宙特集図9 ��( 図10 )。図10 ) 010年6月9日にオーストラリア ��ることができました。5. �果です。そNEC技報 Vol.64 No.1/2011 ------- 137
�機「はやぶさ」の 野 �テム事業部シニアマネージャー138
�システムインテグレータとし