Transcription
NASA Contmctor Report 3597Singular Perturbation Techniquesfor Real Time Aircraft TrajectoryOptimization and ControlAnthonyJ. Calise and Daniel D. MoerderGRANT NSG- 1496AUGUST 1982
TECH LIBRARY KAFB, NMNASA Contractor Report 3597Singular Perturbation Techniquesfor Real Time Aircraft TrajectoryOptimization and ControlAnthony J. Calise and Daniel D. MoerderDexed Universz2yPbiYudeZ %z, PennsyhuniaPrepared forLangley Research Centerunder Grant NSG- 1496National Aeronauticsand Space AdministrationScientificand TechnicalInformationBranch1982
TABLE OF CONTENTSPageSection11INTRODUCTION2PROBLEM FORMULATION AND SOLUTION Thrust.21Legs .213.4Summary of3.5AvoidanceVerticaland Liftlg.Solution.FEEDBACK IMPLEMENTATION.and sof Numerical28.34.Singularities.37.4POINT-MASSMODEL OF THE F-8 AIRCRAFT5NUMERICAL RESULTS.6CONCLUSIONS AND RECOMMENDATIONS. . . . . . . . . . . . . .75OPTIMIZATION. .77. . . . . . . . . . . . . . . . . . .7753.AppendixABOF ySolutionLayerOF ALTITUDEBoundaryENERGY AND HEADING DYNAMICS. . . . . . . . .Solution.AND FLIGHILayerSolutionLayer. . .79. . . . . . . . . . .81.84. . . . . . . . . . . .84. . . . . . . . . . .85PATH ANGLE DYNAMICS.Solution.CORDERING OF ENERGY AND HEADING DYNAMICS.DSEPARATION OF ALTITUDE. . . . . . . . .AND FLIGHT PATH ANGLE ericalComparison9393.94.of-iii-.90Eigenvalues.96
ONOF A HAMILTONIAN FUNCTION WITH ONEUNKNOWN COSTATE. . . . . . . . . . . . . . . . . . . .98ELIMINATION. . . . . . . .100. . . . . . . . . . . . . . . . . . . . . .102OF REFERENCES.OF NUMERICAL SINGULARITIES-iv-
LISTOF edSecond BoundaryLayer HorizontalLiftas aFunctionof Heading Errorfor SeveralEnergy Levels.15Second BoundaryLayer Altitudeof Heading Errorfor us 8 -8 Aircraft.2331.Summary of 3510Zero11CL as a Functionof a forM * 0.18.12CL as a Functionofa forM 0.613CL as a Functionofa forM 0.85.14CL as a Functionofa forM 0.915CL as a functionofa forM 0.98.16CL as a functionofa forM 1.117CLasaFunctionofaforM l.218(CD-CD ) as a FunctionLift8Solutionas a FunctionEnergy Levels.Profilesto DescentOrder.Solutionfor FlightPathfor E 11320 m.VerticalTransitionGeometryand Bank t M 0.18.of(a-ao)at M 0.6of(a-a,)at M 0.85.46019(CD-CD ) as a Function.47020(CD-CD ) as a Function48.021(CD-CD as a Functionof(a-a,)at M 0.922(CD-CD01as a Functionof(a-a,)at M 0.98.23(CD-CD as a Functionof(a-a,)at M 1.1.5124(CD-CD')of(a-ao)at M 1.2.52.49.500as a Function025GroundTracks26Command and Actual27Altitude28Command and cityand Bank leCase 2.Case 2 .-v-forl-3.Case 2 .PathProfile55.5759forCase 2 . .606162
orCase 4 . . . . . . . . . . . . . . . . . . 6432Command and Actual33Altitude34Command and Actual35Lift36Ground37Command and Actual38Altitude39Command and Actual40LiftVersusAltitudeVelocityforCase 4.65.66Case 4 .forFlightand Bank AngleTrackProfilePathProfileAngleforforCase 4.67Case 4 .68.69Case 5 .forVersusAltitudeVelocityProfileand Bank AnglePathProfileLISTCase 5.71.72Case 5 .forFlightforAngleforforCase 5.Case 5 .7374.OF TABLESPageTable1F-8 ClimbAltitude,2F-8 DescentAltitude,Energy.293Summary ofF-84Summary d Range as FunctionsTimeAeroand Range as FunctionsDataand Final. . . . . . . . .ConditionsforTestofEnergy. 24-27of. . . . . 38Cases. . 54of EigenvaluesAlong Climb Path for an F-8. . . . . . . . . . . . . . . . . . . . . . . . . 92ofEigenvaluesforh,y BoundaryLayerDynamics.g7
SINGULARPERTURBATIONTECHNIQUESFOR REAL TIME AIRCRAFTTRAJECTORYOPTIMIZATIONAND CONTROLAnthonyandJ. Calise*DrexelUniversity,DanielD. neswhichand ragek tingseparabilityforcontrolexamined.arethem areon-boardtheAn pt.of Mechanicalcan be den-parti-load.algorithm,executionNumeri-and nimumgivenThisformulation,quantitiestheproblemas a baseline.to numericalwithmethodsand optimizeinterceptdynamicsto identifyingto illustratetimeareleadingdealingtoperturbationto ationsituationsisand stored,datatimeand proceduresofA minimumissuestoto implementation,cularcomputerand ries.withinquestionstheand Mechanicsand
SECTION ntsminimum-timeminimum-timewas derivedcontrollogicusingareby a serieshavingtimebenefits.ofextremeina .procedureand slowproblemsand second,controlaircraftreductionfastsolutionThe resultingF-8an orderhigher-orderlower-orderthethea feedbacktheory.separatedFirst,toan on-lineTherecan be tems,solvedon n.and reducedwereterms,problemsdate,arcshaveInhas beenstudiedand thoseorderordera blemsand to-climbfeedbacklayerthattechniqueoptimiza-in daryflightexpansionsto obtaintheofwithflightappearedseparatea steepestsequenceway includeinvolvingusingof papersproblem,welltoon aircraftwithminimum-time-to-climbbeena moreprimarilymodelling,matchedtheorya numberto olvingordertheresultingmethodareofAn insingularperturbationa system'sand evaluationproblem,was evaluatedtwo majorderivationintercept.interceptThe singularwheretheproblemsFeedback
controlofa "statedescribedoftheinart"theThebya alsobeenThe for[17].theoryon theinwas examinedminimunrtimeperturbationbased.inthisgame problemsThe msthree-dimensionalarewas isworkprovideswithshortrangebeingmaximum velocitycruisearc.A elativethatusedpositioninto ialenergyinthisproblem,largethatoptimalthatand rethe[lo],inIndeed,rateratheranddynamicssolvingand descent,orderinghas beenand terminaland headingfor[lltheThisby climbbe notedthaton-line.betweenabe calculatedattemptingto be resolvedofsuchcases,ofsolutionmatchingand aracterizedItreversemajorand separationhas beenturning.case,by thewas derivedproblemboundarysingularand inalas one ofThe hisreportdue totheispre-
4.A iswhileby singular5.theseThe controlF-8realtiontimeinprepareda classicalhad notyieldedaThe essentialand energydynamics.Itcompletelyseparable,csn be wnthatofthea penaltyindex.as a flightdirectorResultsand a NASA technicalon thiswhen consideredinclusionat NASA Langley.[23],implementationstheisperformancewas timearebeingpathistheare highlyperturbationon flightdynamicsto uespathpathmechanics,thatfromand flightand as been made ofofreportThe majorissuesaddressedas researcheffort.The onpracticalSectionaircraft.Sectionbe foundheadingDetailedindynamics.orderingofthe6 givestheofzerotheorderon-lineofthe2 F-85 presentsoftheaircraftthesolutionThe firstsecond,AppendixC presentstheenergyand olforrelatinginposition,and employednumericaland sA and B.and theofduringpoint-massSectionas follows.thea summaryresults.Appendicesisand summarizesderivationsdynamics,reportencountered4 describesnumericalthis3 tionenergy2 mayandangleseparationandD presentsa means3
--- . . . .-- - --. -. .- . . ---by whichtheseparatetimeAppendixE providesforcomputedofpathand eangledynamicsa detaileda descriptiona Hamiltonianseveraldescriptionand flightscales,minimizingemployedthealtitude-.-. -.-.---. . - .-.- --.-. .- .analysistakenisanalysiscan be analyzedofand justificationwithinone sfora procedureadjointA and B.numericalF.oninvolved.variable,A detailedsingularitiesfrom
SYMBOLScD DragCoefficient ZeroLift LiftCoefficientDragCoefficientcDOcL‘aDDOEEOEO* Slopeof Lift Drag,N Dragfor TotalEnergy Pseudoper UnitCruise Gravitational Altitude,mK InducedDragk FlightL Lift,Path Vertical Horizontal Mass,mLevel,mm/s2WeightingParameterin CostComponent,NComponent,Nkg EnergyStateand Costate HeadingState DynamicPressure, Range,and CostateEigenvalues,Eigenvalues,N/m2mS ReferenceT Thrust,t Time,Area,m2Ns Time-To-Go, Velocity,sm/sW Weight,x9 Ya Horizontala Zero0AngleLiftm AngleEnergymParameterLift Mach y Long Range Cruise HamiltonianpECurve,L W, NgHL1CoefficientNPositionof Attack,LiftAngleVariables,mradof Attack,radl/sl/sFunction
Symbols(cont.)6 Heading,radY3 Flight6C.lAssociatedE- Perturbation3 Perturbationrl3 InducedParameterx Line-of-Sight'El 'h3 PathDragEnergy0radwitha tate, ng%2 x FlightCostate,Paths/radAngleCostate,s/rady4P 1 Bank Angle,P AirII Stretched5’T2radDensity, Timekg/m3TimeConstants,Scale,ssSubscriptsC Climbd DescentD DesiredfE FinalP Relatingmax Maximummin MinimumT Target0f Outer1,2,3,4to ProportionalSolution SolutionSuperscripts(3 Nominal0 Artificially6ValuePerturbedVariableLiftVariable
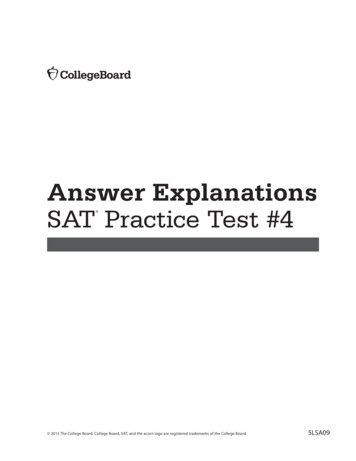
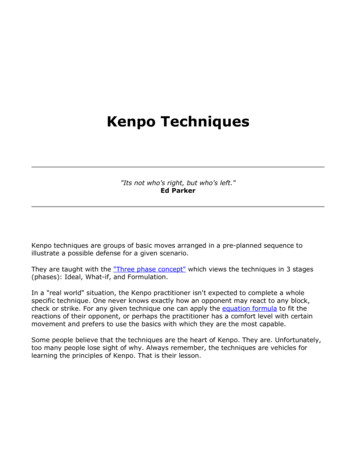
SECTION 2PROBLEM FORMULATION AND ionmay be foundto dicescontrolformulationoffortheNumericalA and B.solutionand thea tgivenconditions.ofmotionare writtenina horizontal,targetcenteredframe:% v cos y cos (29 V cos y sinB - VT cos yT(2.2).BE (T-D)v/w(2.3)E2i L sinu/m V cos y(2.4) E3i4.EY Vsiny(2 05)f(L cos p - W cos y /mV(2.6)The variablessubscriptforproblemFormulationThe hrustDrag(D)"T"a flatconstantweight.aredefinedto designatethe(T)istheaidalongto haveofThesetarget.directedassumedD qs CD 9s(CD 17 CLwiththeFigurea conventional1)1, rm(2.7)a2)awhichcan alsoD qswhereq isbe writtenas(CD KL2/qs),thedynamicq PV2/2pressure,p is(2.8)theairdensityandK n/CL(2.9)aL qs CL qs(CLThe variableE isthea)atotal(2.10)aircraftenergy(kineticand potential)perunitweight. In thisreport,w/xyzisto be interpretedas w/(xyz .7
YA,, '7 'OS YT00v cos y00b0’/ 0X---Figure1.Horizontalplaneinterceptgeometry
E-h whereh is(L),theaircraftbank angleL,(2.11)v2/2gu, T that(P) and thrust(1 wherek 0 forstateand controlL WGThe controlvariablesThe objective(T).isare aircraftto findthe controlsk sin2y)dtminimum,time.variablek 10(2.12)The minimizationissubjectto thefollowingconstraints:(2.13)max(2.14)L 2 qs CL a maxaT(h,V)minwherethe T- max (h,3 MIMmaxisGmaxand Tthe maximum loadIllaXinitialx(t,)for T-q 2 qmaxTminof aircraftliftminimizetfoJ laltitude.areVI(h)factor,is the stallmaxthe minimum and maximum thrustlevelsaltitudeand velocityaircraftstate Y(t, intercept,ais(V).fully- 0 , h(tf)The boundaryspecified,angleof attack,thatareconditionsfunctionsare such thatand we require(2.17) hT(tf)when h (t ) isT ftakenas theprojectedtargetmotioninaltitudehT(tf) hT(0) (VT sinThe objectiveheremate the open loopsolutionin(2.1-2.6)optimalfeedbackinthe systemwithsmallsuccessAn exampleby writtingisgivenfield.aboutof aircraftThe approachWhilethisthisisdepartsend,thethatof motionina naturalsepara-liketo identifyinexperienceresultsspiritvaryingin a non-dimensionalselectedto seek a solutionfromimplyto.approxi-controlcan be done withof motiondynamics,isa near-optimalone wouldThisThe orderingmethodsthe equationsIdeally,and the earlierherewithof E, whichparameters.[15].optimization, 0.exists.the equationsinon an understandingtrajectoryby sicalsingularcontrolform.(2.18)tfusinghave been scaledtionofinY,)offor 1is ininthisby an expansionof asymptoticexpansions,9
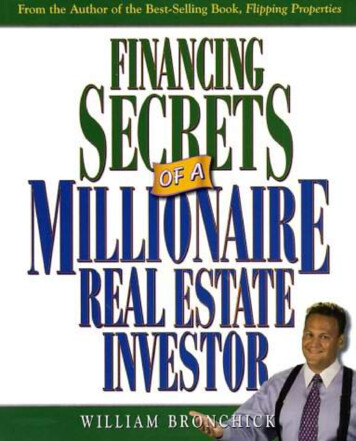
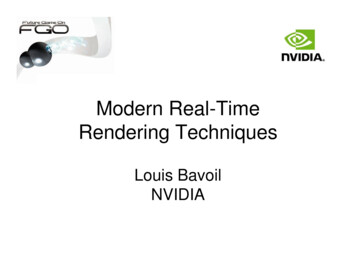
whereE issolutionregardeddependsas "sufficientlymOre on theThe particularbasis.orderingLong rangecruiseand descentboundarylayersand altitude,energy)and rallyand descentinitialsatisfyisarcsfirsttheclimbtimecan be consideredconstraintsaltitudescale,inand low speed o theas slowermaneuversillustratedthe orderingthecomparison6 dynamicsason(toand the optimalSelectingerrors.on a physicslincreasedterminalpathresultingmade up of climb,and terminalenergyhighheadingcan be arguedareenergy.in Appendicesouterinthanduringthetheresultsof E, f3 and h, y dy-C and D.thesolution,coursecontrolledat a constantThe problem(2.1-2.6).The stateplane.In orderh sndE.are separated.optimalA detailedon a fixedE 0 indynamicstheSolutionIn theellingthe(toor loseat largegivento whichon a much shorterallows2.4.degreewhichto theto gainturnofto satisfydecreasedh and y dynamicsaccuracyThe optimalsmall",isvariablesto satisfyaircraftspeed,reducedto optimalinterceptassumed to be trav-as can be seen by lettingare x and y,theisinterceptand therequirementincontrolsare(see Fig.the hori8,l),wemust haveVsin(B-X)or, VT cos yT cos Xin otherwords,horizontalplanedeterminedasho’ E. wheretherearg maxh,EDaxis.motionallowedThe tto theconstraintsin(2.13-2.16)toisdragfor O,Lo(2.21) WL W0(2.22)Do qs CD &qs0and4 dho)VE/2,V(2.23) g(Eo--ho)010- . -.-.--.----- .- .- .---. .--.-to theho and E. are(V)To Do, p, 0, y,whereno relativeline-of-sightthe maximizationand subjectis(2.19)-.- . ,,.,.
Theseconstraints(2.20)forarisetheaircraft'sF-8 aircraftflightforT 2 D, 6).in Figurebe notedwouldlieenergyat therateThe cruise2, superimposedthat,q or Mach boundarieswouldThisperfor-be encounteredof theispointon thein a higherintersectionboundary.cruiseheading(8,)is{VT cos yT cos A/VIcomputedconstraintillustratedforare used insubsequentusingan(2.19): h(2.24)Aand 7rassociatedwithYY 'solution,Chile not explicitlyoutersolution,E-HI[25].B0 sin -lThe costatesisthesolutionThe optimalinwhichtheF-4 aircraftsettingenvelope.mance aircraftwhilefromthe the outersolutions.controlThesetaketheform xxdentX-cosB,/No-VT-sinSo/(Vo-VTY, Itshouldbe notedoftargetmotionto be calculatedperformed2.3YT cos B,)(2.25)cos yT cos 8,)(2.26)cos0areBoundaryThe firstthecruiseand and stored.forThisThe onlyho and ionaddressesenergydynamics.Theconstraints% 0, y1 0, Llin additionistointroducedheading(81)linearlyinT1 (2.13-2.16),and we letis w(2.27)ariseE O.to thatthe dynamics,we haveT1 Tmin(h,V)timeThe controlsidenticalTmax (h,V)when thefortheoutertransformationare T, h,solution.'t t/sand 8.SinceThe optimalT appears,c 0AE1(2.28),hEl '(2.29.)011
istheenergycostatecorrespondvariable.to climbThe solutionsand descent.inOptimization(2.28)withand (2.29)respectto hyields0 --Do)V arg minjhhl(2.30)1v-v0E EIforascent,and arghlcurrentT Dmin{,h-CTmin-Do)VIv-v0(2.31)E EcurrentT Dfordescent.The climbflightenvelopealongthecostatepathto cruiseas a boldq,,,lineforintheFigure2.The optimalfortheThe expressionboundary.superimposedF-8 isfirston (2.32)outersolutionHamiltonianevaluatedat the {xxvCOSB xy0cVsin6-vTcosyT) (2.33)l’0E EhSincethe solutionbe boundary,isindependentas a functionof nvariableon-line.layerisobtained 0.thisL2 Lt2 w2istheinthisboundaryneartheplacehi(E) hLayerand lettingy2 oforand storedSecond BoundaryT t/E2firstconditions:Ho(E,hl)2.4totalliftinitialby 2.34)and L22 islayertimethe horizontalare T, h,whereand L22.hE 0,liftcomponent.Assumingthe optimalthatthrustTheallturningis1T2 Tmax (h2'12islayerhEl - o(E,hl)/Vl(Tl-Do inaircraftv2)(2.35)
city(m/s)envelope300for the F-8 aircraft.350400
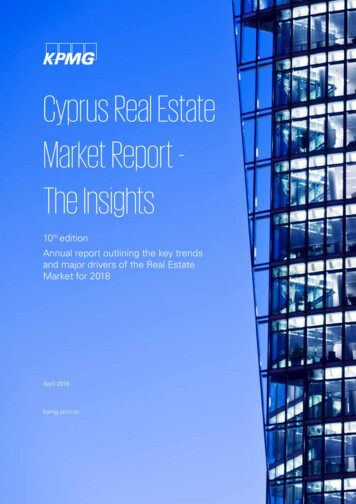
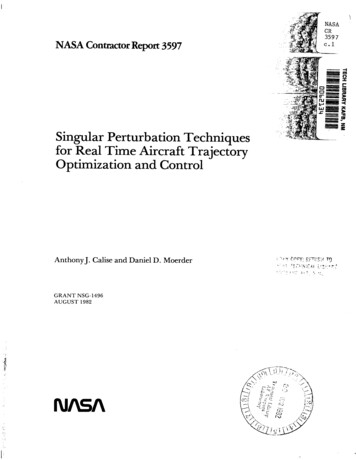
h 2 iswheredefinedbyh2 arg min I-p/KVhHl(E,h,valuesB) istheh,firstB) 1E Ecurrentf3 B currentIboundaryItof E, h and tcurrentasv cos B AyXHamiltonian[VsinB-VTCOSYTl 00x(T-Do)V/w(2.37) 1E1The solutionforL22 isanalytic,and is/VKXEL22 J- qs W Hl(E,h,B)given. signby(2.38)(go-B)1Afterisperformingcomputedthe minimization-2 Hl(E,h,8)ininisupdated,as a startingpoint.Numerical(2.36),resultsforvaluesItof E.errors,energyratelow energyplaced14verysignificantlyand closurelevels1.2 rad.fartheThisfigurestyperatefrom hlisheadingFor largererror.headingFigures3 and ifth2 increasesseverallevels,isthateven forboundaryerrors,isbehaviorto preserveconsiderablyinstantat allindicatesfirstcontrolof A.B go-B forNoteand thatL22theinof asymptoticLfromgiventhat,solution.thetimeas functionsThismax.solutionattemptsthe situationreducingareTo accelerateon line.each timethe previousrespectively,belowzero-orderon rapidlyAB reachesfromperturbationdigressperformedthe F-8 aircraftas A8-9.singulartheenergies,must be performediscan be seen fromand h2 hliswhichthe solutionL22 and h2,h2 does notvariable(2.39)(2.36-2.39)These displaya vslidcostateI h h2the minimizationforthe headingmV/L22The calculationsL22 0(2.36),usingb2 solutioninnecessaryat higherlargeenergies,headingat aturatedso thatbeforethe
E 4696 mFigure3.Normalizedsecond boundarylayerhorizontallift as a functionof headingerror for several energy levels.15
1*b38 t4E 17946mE 14633m/*8O03E 1021 7 m.4 0&JmFigure164.Second boundarylayer altitudeas a functionof heading errorseveralenergy levels.solutionfor
aircraftismidrangeenergy,remainsdrivenclosethe maximum troducingtheforlayerand turncase.resultsrateAt aThe hisfornoteafterillustratethattakesL23 isboundaryof y, min'23foraltitudetheplacetrade-offindynamics.r t/c3layeristhe penaltytheare horizontalgiventhattheItand lettingconstrainedarisesE 0.Theto be(2.40)valueshereh2encountering w cos yon the solutioncontrolsmixed.level.SolutiontimeL13 forDue to non-zeroeffectrateenergythe low energyboundary.LayerboundaryL13inthatsolution.The thirdliftforand te,velocityare more evenlylongeron bothbetweencornerprioritiesto hlL22 can take2.5to thethirdliftterm k sin2and fourth(L23)y inboundaryand y.(2.12)has anlayers.TheThe axItforLiax- Lf3(2.42)can be seen thaty iny3 the second L23 L22 as y - 0boundaryarg max i&ny/H2(h,E,S,y))H is the second boundary2conditionsfor its arguments:fH2hEAy)*sign A(T-D)V/Wforthe constrainedvaluey3 is(h2-h)(2.43)resultserrorThe costateevaluatedat thecurrentcos y - Xy0 vT cos yT(2.44)L23 g/WV cos y 1 ksin2yB2NumericalincreasingHamiltonian0 xE1shown.layer(Ax COSB Xy sinB)V0alsoisYwhereheadingwhichThe expressionlayer.isNotey3 as a functionshown in Figurethatk decreasesforforthis5.The effecty3 0 as h2 hlthe magnitudeborrndarylayerof altitudeofand that,of y3 at allis ,errorforthe parameteras mightzerok isbe expected,flightconditions.determinedfrom317
k .3600 rnThird boundarylayer solutionfor flightpath angle versus altitudeerrorforE 11320 m.18-.-2900. -. -. . .-. - . -.- .- .-.-. -.
- - H2(h,E,B,y3)/Vsin(2.45)y3%32.6FourthIn theof liftBoundary Layerfourthboundaryrespectively)(L14 and L24,angleAs longdynamics.Solutionthe verticallayer,arerefinedtheas L c Lmax,* w cos y - H3(h,E,B,y)qsW/XEL14and horizontalliftcomponentsto reflectthecomponentsare:flightKV2 cos ypath(2.46)1KV2 cos yL24 'B2 gd2hEThese are(2.47)1used to definethefinalliftand bank anglecommands:(2.48)l.l tan -lIfL in(2.48)exceedslJ (Atan/A82In this BhLmax, we setcos y . signL Lmax and obtainan 24/L14 Xy4'thecostatefory,is evaluatedas a root CQOof(2.51-a)y42/w2- cos2y)Iv2A g2(Lmax(2.51-b)B 2@ cos yglv(2.51-c)c (X6 Lmax g/WV cos y 2 - (P22(2.51-d)4 s2y)KV/qsW ahV siny(2.51-e)3in Appendixthus1X 1 - signy4isXy4{y3-y)B 2.52)19p:
GiventhisquadrantItinthethatD for20valuePAy4'to signforappropriateshouldthirdnaturallychoosingbe notedand fourthexistsk inthatcomputedISboundary(2.12)(2.53)placingJJ inthe{y3-y).thebetweenusingarbitrarylayerstheseso thatseparationfailsstates.thisof h and y dynamicsto accountA methodproblemisisforgivenalleviated.thecouplingin Appendix
SECTION 3FEEDBACK omsolutionsdescribedof climband descentthrusttheand liftcontrolthefeedbackthe cent,and the overallofoutertopicsan d lavoidanceof singularitiesorganizationlayerof imband DescentLong rangeothertransients,cruiseat theisa cruisetargetIttargetaltitudeisrangeisIn ch constraintwillforIn r.as occurringcruisecontrolwhen thea longrangeor on theclimbdesignforlongclimbrangethe predictedrangeforispathmust selectdynamicthesepoints,sn interceptIn theto matchtheFor example,profile.Henceforth,rangewhen the horizontalrangecruise1).logicthe ltitude.stageIfand descentclimbT Tmax,thewhetherclimbto flyto as pseudointointerceptand descent.0for(see Fig.elementa climbwould consistof climb and descent*and velocityonthan E at an altitudelessdeterminingsuch thatcruiselevelandThe secondrangealtituderequiredtrajectorybe referredrequiredrangeenergyboundaryAn importantlevelrangelongof thelong(Et).- notare definedthe optimalcase,pointsthe(constantisturningone of two forms.thatof energya portionabovemeet at sn energytheisduringforto notestageenergycan takealtitudeand lossa zoom climbShorttheimportantto gaincruisestageinitialThe firststages.optimalbelowisdecreasesstagethreeThe lowerorenergyEo.theisa pseudodecisionionglogicor shortcruiseand descentEz israngeto heused and afrom E. matchesDescenttheto intercept.21
As was mentionedare independenttionsinof interceptare oftheand thedescent,the d hd(E)altitudeSectionresults(2.31)forofand descentparameters.storedinEo representsthethehd resultsselectedinpseudoSeveralincruisevaluesform hc(E,Eo)selectedare illustratedFigureenergyon thesolutionsThe cdcula-case we have hc(E,Ez).the F-8 aircraftindependentcruiseand icpressureboundary.tc(E,Eo),The time,climbfromand horizontalE to E. wereEOdeterminedtc(E,Eo) IErc(E,Eo)E / E" (Vl/i)dEdistance,rc(E,Eo),by herev1 &E-hl(E,Eo))2gand i istheenergytc(E,Eo)and rc(E,Eo)(3.3)ratecomputedat hc(E,Eo).ispresentedin TableTabular1 fordataforEI and severalhc(E,Eo),pseudoenergies.The expressionsare slightlyforclimb,used htused inpathaltitudeand nd rangeto be ignored.We have:tdW lE*(i/i)dE(3.4)E0rd(E) IEE* (i-,/i)dE0where.'dvl'd22 v1 cos yd h-hd(E) 12g(3.7) sin-l{(dhd/dE)i/Vl}(3.8)cruise
IOoi- 1100012000.I 8000.EiMjI---Figure6.lISeveralclimb altitudethe F-8 aircraft.II1GOOO.profiles20009.for23
TABLE 1F-8 CLIMB ALTITUDE, TIXE AND RANGEAS FUNCTIONSOF .00.00.00.00.00.00.00.0ENERGY 0ENERGY 8.50.00.00.00.00.00.00.00.00.00.00.00.0
TABLE1 (CONTINUED)ASCENTVARIABLES9HtHiENERGY(H)0.00.0.o .48822.961615.442407.923139.444065.64,o . 00.00.00.00.00.00.00.0.o . 0VARIABLES,CRUISE9112.65ENERGY 0o*oENERGY 11320.95Eh;ERGY .00.00.00.00.00.00.00.00.025
TABLE 1 (C NTI WED).ASCENTVARIABLES9CRUISE ENERGY ENERGY 86.406096.007193.287034.380.00.00.00.00.0CRUISET
Applications of singular perturbation theory to flight mechanics problems have, to date, centered primarily on aircraft trajectory optimiza- tion. In the early seventies, a number of papers appeared in which energy state and reduced