Transcription
ABB RoboticsOperating manualTrouble shooting, IRC5
Operating manual - Trouble shooting, IRC5Robot ControllerIRC5M2004Document ID: 3HAC020738-001 Copyright 2005-2010 ABB. All rights reserved.Revision: K
The information in this manual is subject to change without notice and should not beconstrued as a commitment by ABB. ABB assumes no responsibility for any errors thatmay appear in this manual.Except as may be expressly stated anywhere in this manual, nothing herein shall beconstrued as any kind of guarantee or warranty by ABB for losses, damages to personsor property, fitness for a specific purpose or the like.In no event shall ABB be liable for incidental or consequential damages arising fromuse of this manual and products described herein.This manual and parts thereof must not be reproduced or copied without ABB's writtenpermission, and contents thereof must not be imparted to a third party nor be used forany unauthorized purpose. Contravention will be prosecuted. Copyright 2005-2010 ABB All rights reserved.ABB ABRobotics ProductsSE-721 68 VästeråsSweden Copyright 2005-2010 ABB. All rights reserved.Additional copies of this manual may be obtained from ABB at its then current charge.
Table of ContentsOverview of this manual. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51 Safety71.1 Safety signals in the manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.2 Safety symbols on the manipulator labels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.3 Safety during trouble shooting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.4 Applicable safety standards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.5 Safe Trouble Shooting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.5.1 DANGER - Robot without axes' holding brakes are potentially lethal! . . . . . . . . . . . . . . . . . . . . 161.5.2 DANGER - Live voltage inside Drive Module!. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.5.3 WARNING - The unit is sensitive to ESD! . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.5.4 CAUTION - Hot parts may cause burns! . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212 Trouble shooting Overview232.1 Documentation and references . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.2 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.3 Standard toolkit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.4 Tips and Tricks while trouble shooting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.4.1 Trouble shooting strategies. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.4.2 Work systematically . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.4.3 Keeping track of history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.5 Filing an error report. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 Copyright 2005-2010 ABB. All rights reserved.3 Troubleshooting by fault symptoms333.1 Start-up failures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.2 Controller not responding. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.3 Low Controller performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.4 All LEDs are OFF at Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.5 No voltage in service outlet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.6 Problem starting the FlexPendant. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.7 Problem connecting FlexPendant to the controller. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 433.8 Erratic event messages on FlexPendant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 443.9 Problem jogging the robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453.10 Reflashing firmware failure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 463.11 Inconsistent path accuracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473.12 Oil and grease stains on motors and gearboxes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 483.13 Mechanical noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 493.14 Manipulator crashes on power down . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 513.15 Problem releasing Robot brakes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 523.16 Intermittent errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544 Trouble shooting by Unit554.1 Trouble shooting the FlexPendant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564.2 Trouble shooting communications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574.3 Trouble shooting fieldbuses and I/O units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 584.4 Trouble shooting power supply. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 594.4.1 Trouble shooting DSQC 604 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 594.4.2 Trouble shooting DSQC 661 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 624.4.3 Trouble shooting DSQC 662 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 653HAC020738-001 Revision: K3
Table of Contents5 Descriptions and background information695.1 Indications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 695.1.1 LEDs in the Control Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 695.1.2 LEDs in the Drive Module for Drive System 04 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 755.1.3 LEDs in the Drive Module for Drive System 09 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 796 Trouble shooting by Event log465 Copyright 2005-2010 ABB. All rights reserved.Index8343HAC020738-001 Revision: K
Overview of this manualOverview of this manualAbout this manualThis manual contains information, procedures and descriptions, for trouble shooting IRC5based robot systems.UsageThis manual should be used whenever robot operation is interrupted by malfunction,regardless of whether an error event log message is created or not.Who should read this manual?This manual is intended for the following personnel: Machine and robot operators qualified to perform very basic trouble shooting andreporting to service personnel. Programmers qualified to write and change RAPID programs. Specialized trouble shooting personnel, usually very experienced service personnel,qualified for methodically isolating, analyzing and correcting malfunctions within therobot system.PrerequisitesThe reader should: Have extensive experience in trouble shooting industrial electro-mechanicalmachinery. Have in depth knowledge of the robot system function. Be familiar with the actual robot installation at hand, its surrounding equipment andperipherals. Copyright 2005-2010 ABB. All rights reserved.ReferencesReference:Document ID:Product manual - IRC53HAC021313-001Emergency safety information3HAC027098-001General safety information3HAC031045-001Operating manual - IRC5 with FlexPendant3HAC16590-1Operating manual - RobotStudio3HAC032104-001Operating manual - Getting started, IRC5 and RobotStudio3HAC027097-001Technical reference manual - System parameters3HAC17076-1Application manual - MultiMove3HAC021272-001Continues on next page3HAC020738-001 Revision: K5
Overview of this manualContinued6RevisionDescription-First edition.AInformation has been added.The document has been partly restructured.BInformation on how to submit error report has been changed.Information on RAPID change logs have been added.Event log messages have been added.CUpdated Event log messages.DUpdated Event log messages.EUpdated Event log messages.FMinor corrections. Updated Event log messages.GMinor corrections. Updated Event log messages.HNew information in section Serial Measurement Unit regarding the batterypack.More detailed information about trouble shooting power supplies DSQC 604,661 and 662.Removed safety I/O signals: DRV1PANCH1, DRV1PANCH2, DRV1SPEED.New drive system introduced. Drive System 04 and Drive System 09 areboth described.JReleased with RobotWare 5.13The chapter Safety updated with: Updated safety signal graphics for the levels Danger and Warning,see Safety signals in the manual on page 7. New safety labels on the manipulators, see Safety symbols on themanipulator labels on page 9. Updated the graphic in the section DANGER - Live voltage insideDrive Module! on page 17.The contents in the following sections were updated: Corrections regarding drive system information in chapter Descriptions and background information on page 65 Restructured the chapters as per the new document startergy. Updated the graphic in the Recommended actions of the section Novoltage in service outlet on page 38. Updated the Possible causes in the section Problem starting theFlexPendant on page 40. Updated the graphics in the section LEDs in the Control Module onpage 65. Updated the graphic in Possible causes of the section Problemreleasing Robot brakes on page 50.KUpdated Event log messages.3HAC020738-001 Revision: K Copyright 2005-2010 ABB. All rights reserved.Revisions
1 Safety1.1. Safety signals in the manual1 Safety1.1. Safety signals in the manualIntroduction to safety signalsThis section specifies all dangers that can arise when doing the work described in this manual.Each danger consists of: A caption specifying the danger level (DANGER, WARNING, or CAUTION) and thetype of danger. A brief description of what will happen if the operator/service personnel do noteliminate the danger. An instruction on how to eliminate the danger to simplify doing the work.Danger levelsThe table below defines the captions specifying the danger levels used throughout s that an accident will occur if the instructionsare not followed, resulting in a serious or fatal injuryand/or severe damage to the product. It applies towarnings that apply to danger with, for example,contact with high voltage electrical units, explosionor fire risk, risk of poisonous gases, risk of crushing,impact, fall from height, etc.WARNINGWarns that an accident may occur if the instructionsare not followed that can lead to serious injury,possibly fatal, and/or great damage to the product. Itapplies to warnings that apply to danger with, forexample, contact with high voltage electrical units,explosion or fire risk, risk of poisonous gases, risk ofcrushing, impact, fall from height, etc.ELECTRICALSHOCKWarns for electrical hazards which could result insevere personal injury or death.CAUTIONWarns that an accident may occur if the instructionsare not followed that can result in injury and/ordamage to the product. It also applies to warnings ofrisks that include burns, eye injury, skin injury,hearing damage, crushing or slipping, tripping,impact, fall from height, etc. Furthermore, it appliesto warnings that include function requirements whenfitting and removing equipment where there is a riskof damaging the product or causing a breakdown.danger Copyright 2005-2010 ABB. All rights reserved.warningElectrical shockcautionContinues on next page3HAC020738-001 Revision: K7
1 Safety1.1. Safety signals in the OSTATIC Warns for electrostatic hazards which could result inDISCHARGE (ESD) severe damage to the product.Electrostatic discharge(ESD)NOTEDescribes important facts and conditions.TIPDescribes where to find additional information orhow to do an operation in an easier way.Note Copyright 2005-2010 ABB. All rights reserved.Tip83HAC020738-001 Revision: K
1 Safety1.2. Safety symbols on the manipulator labels1.2. Safety symbols on the manipulator labelsIntroduction to labelsThis section describes safety symbols used on labels (stickers) on the manipulator.Symbol are used in combinations on the labels, describing each specific warning. Thedescriptions in this section are generic, the labels can contain additional information such asvalues.Types of labelsBoth the manipulator and the controller are marked with several safety and informationlabels, containing important information about the product. The information is useful for allpersonnel handling the manipulator system, for example during installation, service, oroperation.The safety labels are language independent, they only use graphics. See Symbols on safetylabels on page 9.The information labels can contain information in text (English, German, and French).Symbols on safety labelsSymbolDescriptionWarning!Warns that an accident may occur if the instructions are notfollowed that can lead to serious injury, possibly fatal, and/orgreat damage to the product. It applies to warnings that apply todanger with, for example, contact with high voltage electricalunits, explosion or fire risk, risk of poisonous gases, risk ofcrushing, impact, fall from height, etc. Copyright 2005-2010 ABB. All rights reserved.xx0900000812xx0900000811Caution!Warns that an accident may occur if the instructions are notfollowed that can result in injury and/or damage to the product.It also applies to warnings of risks that include burns, eye injury,skin injury, hearing damage, crushing or slipping, tripping,impact, fall from height, etc. Furthermore, it applies to warningsthat include function requirements when fitting and removingequipment where there is a risk of damaging the product orcausing a breakdown.ProhibitionUsed in combinations with other symbols.xx0900000839Continues on next page3HAC020738-001 Revision: K9
1 Safety1.2. Safety symbols on the manipulator labelsContinuedSymbolDescriptionProduct manualRead the product manual for details.xx0900000813Before dismantling see product manualxx0900000816Do not dismantleDismantling this part can cause injury.xx0900000815Extended rotationThis axis has extended rotation (working area) compared tostandard.Brake releasePressing this button will release the brakes. This means that themanipulator arm can fall down.xx0900000808Tip risk when loosening boltsThe manipulator can tip over if the bolts are not securelyfastened.xx0900000810CrushRisk for crush injuries.xx0900000817Continues on next page103HAC020738-001 Revision: K Copyright 2005-2010 ABB. All rights reserved.xx0900000814
1 Safety1.2. Safety symbols on the manipulator labelsContinuedSymbolDescriptionHeatRisk of heat that can cause burns.xx0900000818Moving robotThe robot can move unexpectedly.xx0900000819Brake release buttonsxx0900000820Lifting bolt Copyright 2005-2010 ABB. All rights reserved.xx0900000821Lifting of robotxx0900000822OilCan be used in combination with prohibition if oil is not allowed.xx0900000823Continues on next page3HAC020738-001 Revision: K11
1 Safety1.2. Safety symbols on the manipulator labelsContinuedSymbolDescriptionMechanical stopxx0900000824Stored energyWarns that this part contains stored energy.Used in combination with Do not dismantle symbol.xx0900000825PressureWarns that this part is pressurized. Usually contains additionaltext with the pressure level.xx0900000826Shut off with handleUse the power switch on the controller. Copyright 2005-2010 ABB. All rights reserved.xx0900000827123HAC020738-001 Revision: K
1 Safety1.3. Safety during trouble shooting1.3. Safety during trouble shootingGeneralAll normal service work; installation, maintenance and repair work, is usually performed withall electrical, pneumatic and hydraulic power switched off. All manipulator movements areusually prevented by mechanical stops etc.Trouble shooting work differs from this. While trouble shooting, all or any power may beswitched on, the manipulator movement may be controlled manually from the FlexPendant,by a locally running robot program or by a PLC to which the system may be connected.Dangers during trouble shootingThis implies that special considerations unconditionally must be taken when troubleshooting:All electrical parts must be considered as live. The manipulator must at all times be expected to perform any movement. Since safety circuits may be disconnected or strapped to enable normally prohibitedfunctions, the system must be expected to perform accordingly. Copyright 2005-2010 ABB. All rights reserved. 3HAC020738-001 Revision: K13
1 Safety1.4. Applicable safety standards1.4. Applicable safety standardsStandards, EN ISOThe manipulator system is designed in accordance with the requirements of:StandardDescriptionEN ISO 12100 -1Safety of machinery - Basic concepts, general principles fordesign - Part 1: Basic terminology, methodologyEN ISO 12100 -2Safety of machinery - Basic concepts, general principles fordesign - Part 2: Technical principlesEN ISO 13849-1Safety of machinery, safety related parts of control systems Part 1: General principles for designEN ISO 13850Safety of machinery - Emergency stop - Principles for designEN ISO 10218-11Robots for industrial environments - Safety requirements -Part 1RobotEN ISO 9787Manipulating industrial robots, Coordinate systems and motionnomenclaturesEN ISO 9283Manipulating industrial robots, Performance criteria and relatedtest methodsEN ISO 14644-12Classification of air cleanlinessEN ISO 13732-1Ergonomics of the thermal environment - Part 1EN 61000-6-4(option 129-1)EMC, Generic emissionEN 61000-6-2EMC, Generic immunity3Arc welding equipment - Part 1: Welding power sources3EN IEC 60974-10Arc welding equipment - Part 10: EMC requirementsEN 60204-1Safety of machinery - Electrical equipment of machines - Part 1General requirementsIEC 60529Degrees of protection provided by enclosures (IP code)1. There is a deviation from paragraph 6.2 in that only worst case stop distances and stoptimes are documented.2. Only robots with Protection Clean Room.3. Only valid for arc welding robots. Replaces EN 61000-6-4 for arc welding robots.European standardsStandardDescriptionEN 614-1Safety of machinery - Ergonomic design principles - Part 1:Terminology and general principlesEN 574Safety of machinery - Two-hand control devices - Functionalaspects - Principles for designEN 953Safety of machinery - General requirements for the design andconstruction of fixed and movable guardsContinues on next page143HAC020738-001 Revision: K Copyright 2005-2010 ABB. All rights reserved.EN IEC 60974-1
1 Safety1.4. Applicable safety standardsContinuedOther standardsDescriptionANSI/RIA R15.06Safety Requirements for Industrial Robots and Robot SystemsANSI/UL 1740(option 429-1)Safety Standard for Robots and Robotic EquipmentCAN/CSA Z 434-03(option 429-1)Industrial Robots and Robot Systems - General Safety Requirements Copyright 2005-2010 ABB. All rights reserved.Standard3HAC020738-001 Revision: K15
1 Safety1.5.1. DANGER - Robot without axes' holding brakes are potentially lethal!1.5 Safe Trouble Shooting1.5.1. DANGER - Robot without axes' holding brakes are potentially lethal!DescriptionSince the robot arm system is quite heavy, especially on larger robot models, it is dangerousif the holding brakes are disconnected, faulty, worn or in any way rendered non-operational.For instance, a collapsing IRB 7600 arm system may kill or seriously injure a person standingbeneath it.EliminationActionInfo/illustration1. If you suspect that the holding brakes arenon-operational, secure the robot armsystem by some other means beforeworking on it.Weight specifications etc. may be found inthe Product manual of each robot model.2. If you intentionally render the holdingbrakes non-operational by connecting anexternal voltage supply, the utmost caremust be taken!How to correctly connect an externalvoltage supply is detailed in the Productmanual of each robot model.DANGER! Copyright 2005-2010 ABB. All rights reserved.NEVER stand inside the robot workingarea when disabling the holding brakesunless the arm system is supported bysome other means!DANGER!Under no circumstance stand beneath anyof the robot’s axes!163HAC020738-001 Revision: K
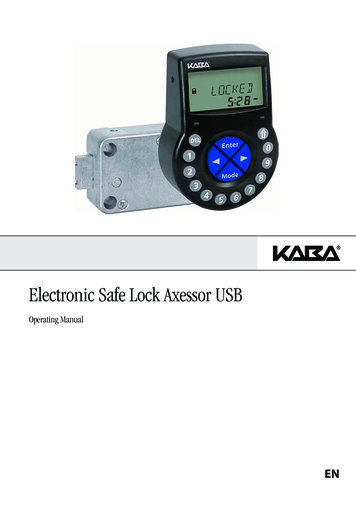
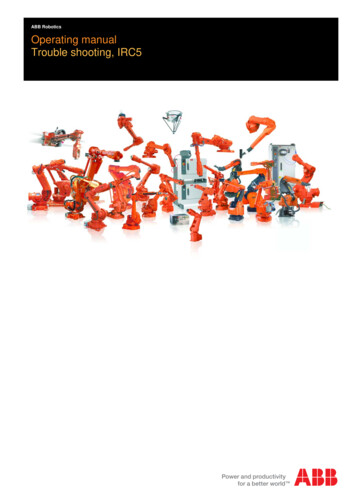
1 Safety1.5.2. DANGER - Live voltage inside Drive Module!1.5.2. DANGER - Live voltage inside Drive Module!DescriptionThe Drive Module has live voltage potentially accessible directly behind the rear covers andinside the front cover, even when the main switches have been switched off.Aen1000000049 Copyright 2005-2010 ABB. All rights reserved.Ben1000000050ALive voltage at transformer terminals even if the main power switches have beenswitched off.BLive voltage at Motors ON terminals even if the main power switches have beenswitched off.Continues on next page3HAC020738-001 Revision: K17
1 Safety1.5.2. DANGER - Live voltage inside Drive Module!ContinuedEliminationRead this information before opening the rear cover of either module.StepAction1. Make sure the incoming mains power supply has been switched off.2. Use a voltmeter to verify that there is not voltage between any of the terminals. Copyright 2005-2010 ABB. All rights reserved.3. Proceed with the service work.183HAC020738-001 Revision: K
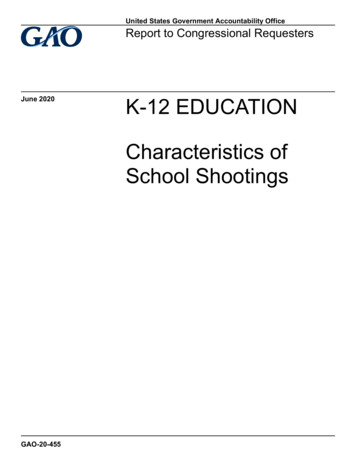
1 Safety1.5.3. WARNING - The unit is sensitive to ESD!1.5.3. WARNING - The unit is sensitive to ESD!DescriptionESD (electrostatic discharge) is the transfer of electrical static charge between two bodies atdifferent potentials, either through direct contact or through an induced electrical field. Whenhandling parts or their containers, personnel not grounded may potentially transfer high staticcharges. This discharge may destroy sensitive electronics.EliminationActionNote1. Use a wrist strapWrist straps must be tested frequently to ensurethat they are not damaged and are operatingcorrectly.2. Use an ESD protective floor mat.The mat must be grounded through a currentlimiting resistor.3. Use a dissipative table mat.The mat should provide a controlled discharge ofstatic voltages and must be grounded.Location of wrist strap buttonThe location of the wrist strap button is shown in the following illustration.IRC5 Copyright 2005-2010 ABB. All rights reserved.The wrist strap button is located in the top right corner.xx0500002171AWrist strap buttonContinues on next page3HAC020738-001 Revision: K19
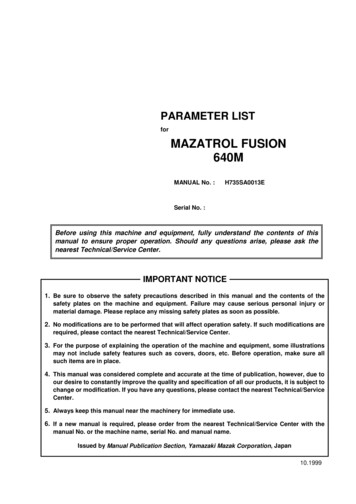
1 Safety1.5.3. WARNING - The unit is sensitive to ESD!ContinuedPanel Mounted Controllerxx0600003249Panel Mounted Control ModuleBPanel Mounted Drive ModuleCWrist strap button NOTE! When not used, the wrist strap must always beattached to the wrist strap button. Copyright 2005-2010 ABB. All rights reserved.A203HAC020738-001 Revision: K
1 Safety1.5.4. CAUTION - Hot parts may cause burns!1.5.4. CAUTION - Hot parts may cause burns!DescriptionDuring normal operation, many manipulator parts become hot, especially the drive motorsand gears. Sometimes areas around these parts also become hot. Touching these may causeburns of various severity.Because of a higher environment temperature, more surfaces on the manipulator get hot andmay result in burns.NOTE!The drive parts in the cabinet can be hot.EliminationThe instructions below detail how to avoid the dangers specified above:ActionInfo1. Always use your hand, at some distance, to feel if heat isradiating from the potentially hot component beforeactually touching it.2. Wait until the potentially hot component has cooled if it isto be removed or handled in any other way. Copyright 2005-2010 ABB. All rights reserved.3. The Bleeder can be hot upto 80 degrees.3HAC020738-001 Revision: K21
1 Safety Copyright 2005-2010 ABB. All rights reserved.1.5.4. CAUTION - Hot parts may cause burns!223HAC020738-001 Revision: K
2 Trouble shooting Overview2.1. Documentation and references2 Trouble shooting Overview2.1. Documentation and referencesGeneralA great deal of effort was put into writing the event log messages as well as the technicaldocumentation. Though imperfect, they may give vital clues. They are also constantly beingupgraded.The product documentation is available in several languages.Read the documentation!Do not wait until nothing else works to read the manual!References to document numbers are specified in the chapter Reference information inProduct manual - IRC5.Read the circuit diagram!The complete electrical circuitry of the controller is documented in Product manual - IRC5.It contains a lot of information useful, or even essential, to a trained trouble shooter.Read the logs! Copyright 2005-2010 ABB. All rights reserved.The error event logs which may be viewed on either the FlexPendant or RobotStudio, containlots of information about any malfunction detected by the system.en0300000547Check the electronical unit's LEDs!If a fault is thought to be caused by an electronic unit (circuit board in the controller or other),the LEDs on the unit front may give leads.These are described in section Indications on page 65.3HAC020738-001 Revision: K23
2 Trouble shooting Overview2.2. Overview2.2. OverviewHow to use this manual when trouble shootingThe illustration and description detail how to put the information in this manual to best useduring trouble shooting the robot system.en0400001200Trouble shooting manual Each fault or error is first detected as a symptom, for which an error event log messagemay or may not be created. It could be an error event log message on the FlexPendant,an observation that the gearbox on axis 6 is getting hot or that the controller can notbe started. The faults displaying an event log message are listed in the end of thismanual.Instructions, how to correct faults: 24The instructions are divided into two main categories: descriptions of how to correctlyhandle the different parts of the system and instructions of how to remedy faultscausing the symptoms specified above. The latter category is divided into two sub-3HAC020738-001 Revision: K Copyright 2005-2010 ABB. All rights reserved.Fault symptoms and malfunctions:
2 Trouble shooting Overview2.2. Overviewcategories, depending on whether to trouble shoot a specific symptom or a suspectedunit causing the problem. The first category contains information on how to use theevent log to facilitate trouble shooting, etc.Recommended working procedures: Here, you will find a procedure for how to correctly perform certain specific tasks.These may be used to make sure the seemingly irrational behavior of the system is notdue to incorrect handling.Basic reference info: This section contains information about what tools to use, references to documentsthat may be useful when trouble shooting, etc.Description, systems: The different systems and sub-systems are described to give a better understanding ofits function when it works “as it’s supposed to”. This enables the trouble shooter tobetter see and understand the differences between a system that’s functional and onethat’s not.Description, components and details: Specific details of the system are described with regards to their function, etc.Description, functions: Contains descriptions on how specific functions within the system work, e.g the RUNchain, and what signals and other systems affect that particular function. This providesfor a better understanding of the relations and mechanisms of the robot system.Indications All indication LEDs and other indications (as found on the Control and Drive Modulesas well as separate circuit boards, etc) are described in this section along withinformation about their indication modes and significances respectively.Recommended actions are often specified or references containing such instructions. Copyright 2005-2010 ABB. All rights reserved.Event log messages: This section is basically a printout of all available event log messages. These may bedisplayed either on the FlexPendant or using RobotStudio. Having access t
Updated Event log messages. H New information in section Serial Measurement Unit regarding the battery pack. More detailed information about trouble shooting power supplies DSQC 604, 661 and 662. Removed safety I/O signals: DRV1PANCH1, DRV1PANCH2, DRV1SPEED. New drive system introduced. Drive System 04 and Drive System 09 are