Transcription
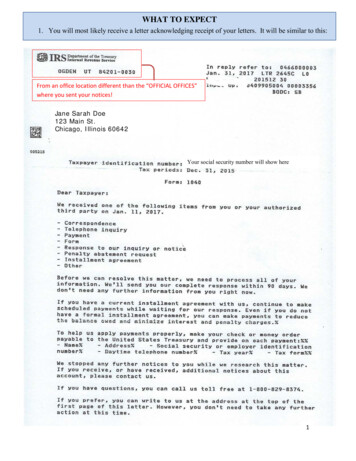
Shenzhen Yangda Security Co., LtdYANGDA gimbal protocolV1.9DescriptionsvideoTF card maxProtocol support functionsSky Eye-I 1080P10x 1080p gimbalHDMI 1080P60/AV32GCMD control YAW/ROLL/PITCH and get angles ,control camera zoom.Sky Eye-18HZ 1080P18x 1080p gimbalHDMI 1080P60/AV32G18x 1080pHDMI 1080P60/AV32GHDMI 1080P60/ AV32GHDMI 1080P60/AV32GHDMI 1080P60128GSky Eye-30HZ-S BallEagle Eye-10IE1080p gimbal30x 1080ppod30x 1080p tracking pod10x EO 19mm 640 IR trackinggimbalEagle Eye-20IE20x EO 25mm 640 IR trackingHDMI 1080P60onvif30X EO 25mm 640 IR trackingpodEagle Eye-30IE-50or RJ45onvifgimbalEagle Eye-30IEHDMI 1080P60HDMI 1080P60or RJ45or RJ45128G128G128G128GHDMI 1080P60128Gonvif30X 50mm 640 IR trackingHDMI 1080P60 or RJ45gimbalSky Eye-36SZ-IPSky Eye-Z6KSky Eye-Duo Pro36x 1080p tracking gimbal36x 1080p gimbalyaSky Eye-36SZngd12X 800M laser trackingSONY a6000/a7RII gimbalFLIRduo PRO gimbalHDMI 1080P60RJ45 ONVIF 1080P25CMD control YAW/ROLL/PITCH and get angles ,control camera zoom.CMD control YAW/ROLL/PITCH and get angles ,control camera zoom.CMD control YAW/ROLL/PITCH and get angles ,control camera zoom,OSD for ,tracking, GPS, pod statusCMD control YAW/ROLL/PITCH and get angles ,control camera zoom,OSD for ,tracking, GPS, pod status,IR camera controlCMD control YAW/ROLL/PITCH and get angles ,control camera zoom,OSD for ,tracking, GPS, pod status,IR camera controlCMD control YAW/ROLL/PITCH and get angles ,control camera zoom,OSD for ,CMD control YAW/ROLL/PITCH and get angles ,control camera zoom,OSD for ,tracking, GPS, pod status,IR camera controlCMD control YAW/ROLL/PITCH and get angles ,control camera zoom,OSD for ,tracking, GPS, pod status128GCMD control YAW/ROLL/PITCH and get angles ,control camera zoom,OSD for ,tracking, GPS, pod status128GP30HDMI 1080pCMD control YAW/ROLL/PITCH and get angles ,control camera zoom.tracking, GPS, pod status,IR camera controlonvifSky Eye-12NLCMD control YAW/ROLL/PITCH and get angles ,control camera zoom.inSky Eye-30HZ Ball30xnlSky Eye-30HZpodaoSky Eye-18HZ 1080P Balle.comModelCMD control YAW/ROLL/PITCH and get angles ,control camera zoom, have app forPC, phone.a6000 /a7RIICMD control YAW/ROLL/PITCH and get angles ,control sony a6000 /a7RiI camerazoom,picture, recordHDMITwo TF cardCMD control YAW/ROLL/PITCH and get angles ,control camera
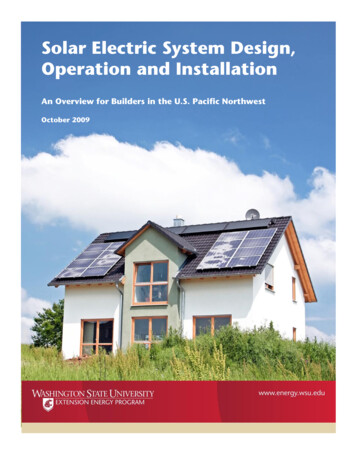
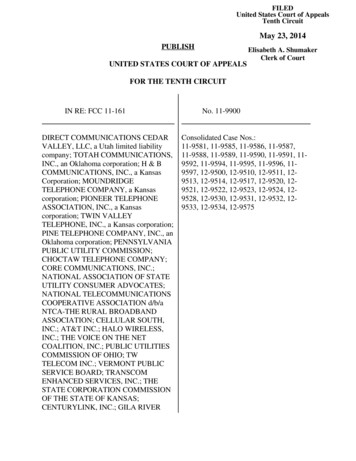
TTL 3.3v UART baud : 115200/9600(some version),8,1,none, HEXe.comShenzhen Yangda Security Co., LtdWe have connect RX1 and RX2 with yellow stubs, and connect TX1 andTX2 with stubs. DO NOT remove the stubs!Please connect your RX to RX3, your TX connect to TX3.PAY attention:1) the signals inside red frame are all TTL signal, do not connect themto power or ground, if do ,may damage our device!2) The other signals is for PWM input signals to control the gimbal,PWM inin5v outPWM in : connect to your PWM reciever signal (not include AV, AV isoutput for CVBS video signal)GNDTTL 9600/8/1/NngdRXBOARDaoUSERTXyaGNDnl5V out:for your PWM reciever power supply;GND:connect to your PWM reciever GND;
Shenzhen Yangda Security Co., LtdFF 01 0F 10RMFF 01 0F 10 RM PM YM RSL RSH RAL RAH PSL PSH PAL PAH YSL YSH YAL YAH CSe.com1)combine long cmd control:: headerroll control mode,00 mode no control,01 mode speed, 42 mode angle 45 mode angle rel frameRSL RSH roll speed (2 byte signed little-endian order),units: 0.122degree/sec;RAL RAH roll angle (2 byte signed little-endian order),units: 0.02197degreeinPM PSL PSH PAL PAH :Pitch control, same as roll control formatsYM YSL YSH YAL YAH: Yaw control, same as roll control formatsnlSL Speed Low byte , SH speed high byte, AL angle low byte , AH angle high byte ;CS body checksum, checksum is calculated as a sum of all bytes (from ‘RM’ to ‘YAH’) modulo 256;aoexample1: ROLL no control,PITCH speed mode 1.2degree/sec, YAW angle mode to 20 degree。FF 01 0F 10 00 01 05 00 00 00 00 0A 00 00 00 00 00 E8 03 FBngdExample2: ROLL no control,PITCH angle mode to 40 degree,YAW angle mode 20 degree。FF 01 0F 10 00 05 05 00 00 00 00 00 00 D0 07 00 00 E8 03 CCExample3: speed stop pitch and yaw:yaFF 01 0F 10 00 01 01 00 00 00 00 00 00 00 00 00 00 00 00 02
Shenzhen Yangda Security Co., LtdupAnglemodee.com2)visca angle mode control81 01 0A 01 VV WW 03 01 FFdown 81 01 0A 01 VV WW 03 02 FFleft81 01 0A 01 VV WW 01 03 FFright81 01 0A 01 VV WW 02 03 FFVVVV:speed0X00(0)-0X32(50)WW angle0X01(0)-0X96(150)For example:inhome 81 01 0A 01 VV WW 03 03 FF 0 , gimbal use default speedpitch up 50 degree81 01 0A 01 00 32 03 02 FFpitch down 50 degree81 01 0A 01 00 00 03 03 FFhome position3) visca speed modeUpLeft---------- 81 01 06 01 05 05 01 01 FFngdup----------------81 01 06 01 00 10 03 01 FFaonl81 01 0A 01 00 32 03 01 FFdown------------81 01 06 01 00 10 03 02 FFleft--------------- 81 01 06 01 10 00 01 03 FFright--------------81 01 06 01 10 00 02 03 FFyastop---------------81 01 06 01 00 00 03 03 FFUpRight--------- 81 01 06 01 05 05 02 01 FFDownLeft-------- 81 01 06 01 05 05 01 02 FFDownRight------- 81 01 06 01 05 05 02 02 FF
Shenzhen Yangda Security Co., LtddownFF 01 00 10 00 SP CSleftFF 01 00 04 SP 00 CSrightFF 01 00 02 SP 00 CSstopFF 01 00 00 00 00 0155 01 XL XH YL YH 02 CSSpeed modecombineX, yCS: checksum from 55 to 02,example:FF 01 00 10 00 0a 1bpitch up, speed 10pitch down, speed 10ngdFF 01 00 08 00 0a 13CS : checksum calculated from byte2 to byte6 , modulo 2560xXHXL: 0 500: XLyaw low byte,XH: yaw high byte, 2 byte signed little-endian0xYHYL: 0 500: YLpitch low byte,YH: pitch high byte, 2 byte signed little-endianaomodulo 256SP: SPEED, 00 3FinseparateFF 01 00 08 00 SP CSnlSpeed modeupe.com4 ) pelco-d speed modeYpXFF 01 00 04 0a 00 0f yaw left speed 10yaw right speed 10FF 01 00 00 00 00 01stopyaFF 01 00 02 0a 00 0dGimbal goes to point P(0x60,0x60)Example: 55 01 60 00 60 00 02 18
5) cmd get anglesOutgoing Cmd: 3e 3D 00 3D 00incoming data3e 3d 36 73 { .body. } csFor examplee.comShenzhen Yangda Security Co., Ltd{3E 3D 36 73 98 FF 98 FF E6 FF FF FF 00 00 00 00 00 00 00 00 00 00 1C F7 1C F7 28 F7 FF FF 00 00 00 00 00 00 00 00 00 00 88 FF 88 FF F8 F6FF FF 00 00 00 00 00 00 00 00 00 00 4E }( 98 FF ROLL IMU angle ROLL status data, detail as followingunits: 0.02197degree98 FF ROLL RC TARGET ANGLEunits: 0.02197degreenl98 FF 98 FF E6 FF FF FF 00 00 00 00 00 00 00 00 00 00in3E 3D 36 73 header,aoE6 FF FF FF ROLL STATOR REL ANGLE camera actual Euler angle units: 0.02197degree)ngd00 00 00 00 00 00 00 00 00 00 10 bytes reserved1C F7 1C F7 28 F7 FF FF 00 00 00 00 00 00 00 00 00 00 pitch status data ,same as roll format4E body checksumya88 FF 88 FF F8 F6 FF FF 00 00 00 00 00 00 00 00 00 00 yaw status data , same as roll format
Shenzhen Yangda Security Co., Ltde.com6) camera control cmd:6.1) Sky Eye-I 1080P,Sky Eye-18HZ,Sky Eye-30HZ,Sky Eye-18HZ (Ball),Sky Eye-30HZ(ball) HDMI output version:ngdaonlinFF 01 00 40 00 00 41zoom outFF 01 00 20 00 00 21zoom inFF 01 00 00 00 00 01stop zoomFF 01 01 00 00 00 02focus inFF 01 00 80 00 00 81focus outFF 01 00 00 00 00 01stop focusFF 01 00 07 00 65 6d start rec, camera feedback 3A 77 52 65 63 31 0D 00FF 01 00 07 00 64 6c stop rec, camera feedback 3A 77 52 65 63 30 0D 00FF 01 00 07 00 67 6Fmode change (picture mode/record mode switch) no feedbackFF 01 00 07 00 55 5Drecord start/stop@record mode camera feedback 3A 77 52 65 63 31 0D 00 when start reccamera feedback 3A 77 52 65 63 30 0D 00 when stop recFF 01 00 07 00 55 5D take a picture@picture mode81 09 04 47 ffquery zoom positionZoom position feedback:90 50 0p 0q 0r 0s FFpqrs: zoom position value81 01 04 01 03 ff day mode81 01 04 01 02 ff night mode81 01 04 51 02 ff auto modezoom out viscazoom in viscaya6.2)Sky Eye-12NL,Sky Eye-20NL RJ45 onvif IP camera output version:81 01 04 07 37 FF81 01 04 07 27 FF//wide//tele
Shenzhen Yangda Security Co., Ltd81 01 04 08 27 FF}stop zoom visca//neare.comfocus in visca81 01 04 08 37 FF//far81 01 04 07 00 FFstop focus visca81 01 04 08 00 FF55 02 07 aastart record55 02 05 aastop record55 02 06 aaZoom direct pos81 01 04 47 0p 0q 0r 0s FFquery zoom position90 41 fffinished cmd: 90 51 ff81 09 04 47 ffZoom position feedback:aoCamera feedback :get cmd:nlstart pictureinfocus out visca90 50 0p 0q 0r 0s FF0xpqrs: zoom position valuengd6.3)Sky Eye-12NL laser light cmdzoom in laser{FF 01 01 04 00 1a 20} zoom out laserlaser on{FF 01 01 01 01 00 04}laser offya6.4) Z6K cmd for sony a6000/a7Riipoweron a6000FF 01 00 50 00 00 51zoom tele a6000FF 01 00 20 00 00 21picture a6000ff 01 00 07 00 66 6Ezoom wide a6000stop zoom a6000record a6000{FF 01 01 04 01 1a 21}{FF 01 01 01 00 00 03}FF 01 00 40 00 00 41FF 01 00 00 00 00 01FF 01 00 07 00 55 5D6.5) Sky Eye-30HZ-S,Sky Eye-36SZ,Eagle Eye-10IE,Eagle Eye-20IE,Eagle Eye-30IE tracking
Shenzhen Yangda Security Co., Ltd81 01 04 07 37 FFzoom in visca81 01 04 07 27 FFfocus out visca81 01 04 08 37 FFfocus in visca81 01 04 08 27 FF}stop zoom visca//tele//near//far81 01 04 07 00 FF81 01 04 08 00 FF81 09 04 47 ffZoom position feedback:90 50 0p 0q 0r 0s FFpqrs: zoom position valuenlquery zoom positioninstop focus viscarec start tracker//widee.comzoom out visca7e 7e 44 00 00 7c 01 00 00 00 00 00 00 00 00 00ao00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 0000 00 00 00 00 00 00 00 00 00 00 00 00 00 00 bd7e 7e 44 00 00 7c 00 00 00 00 00 00 00 00 00 00ngdrec stop tracker00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 0000 00 00 00 00 00 00 00 00 00 00 00 00 00 00 bc7e 7e 44 00 00 7c 02 00 00 00 00 00 00 00 00 00yapicture tracker00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 0000 00 00 00 00 00 00 00 00 00 00 00 00 00 00 be
For tracking protocol,please contact with our technical support.As to the protocol, we send a 48bytes data to the tracker: cmd data[]Gimbal function1. Picture in pictureinProtocol: cmd data[5] 0X78; // video setting0x01:IR;ngdIR only[] ao0x02:IR EO(Pip);nlCmd data[14] 0x00:EO IR(Pip)0x03:EO。e.comShenzhen Yangda Security Co., x00,0x00,0x00,0x00,0x00,0x00,0x00,0IR EO[] ,0x00,0xb9};
Shenzhen Yangda Security Co., EO only[] 00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xbb};nlEO IR[] 00,0x00,0x00,0x00,0x00,0x00,0x00,02. Color 00,0x00,0x00,0xb8};Protocol: cmd data[5] 0X78; // video setting0x00 cmd data[15] 0 white hot/ 1 black hotyaCmd data[6] 0x01:color1;0x02:color2;
Shenzhen Yangda Security Co., Ltde.com0x03:color3;0x04: color4color 1[] k hot[] ng mode A)ngd3. How to enter tracking mode----there are two tracking modeProtocol: cmd data[5] 0X71; // tracking use ‘ ’ cursor0x00 ; re-select tracking targetyaCmd data[11] 0x01:Tracking of target (question 4 and question 5)Cmd data[13] 0x24 ; tracking size 1
0x28:tracking size 20x30:tracking size 30x2c. tracking size1 and size2 auto selecte.comShenzhen Yangda Security Co., Ltd0x3c tracking size1 and size2 and size3 auto selectin0x38 , tracking size2 and size 3 auto selectnltarget tracking[] select target[] ng mode B)Protocol: cmd data[5] 0X86; //finger tracking modecmd data[7] 0xXL ; X LOW BYTEcmd data[11] 0X01;
Shenzhen Yangda Security Co., Ltd0xXH ; X HIGT BYTEcmd data[9] 0xYL ;Y LOW BYTE0xYH ; Y HIGH BYTE960,540yangdTrack the target at position :(257,257)7e 7e 44 00 00 86 00 01 01 01 01 01 00 3c 00 0000 00 00 00 00 00 00 00 00 00 00 00 00 00 00 0000 00 00 00 00 00 00 00 00 00 00 00 00 00 00 07inTrack the target at position :(1025,769)7e 7e 44 00 00 86 00 01 04 01 03 01 00 3c 00 0000 00 00 00 00 00 00 00 00 00 00 00 00 00 00 0000 00 00 00 00 00 00 00 00 00 00 00 00 00 00 0C4. Tracking of target - refer question 35. Lock target - refer question 3X 19200,0nlTrack the target at position :(769,769)7e 7e 44 00 00 86 00 01 03 01 03 01 00 3c 00 0000 00 00 00 00 00 00 00 00 00 00 00 00 00 00 0000 00 00 00 00 00 00 00 00 00 00 00 00 00 00 0baocmd data[10] cmd date[13] track sizee.comcmd data[8] Y 1080
6. Change target,move cursor to the new targete.comShenzhen Yangda Security Co., LtdStep1: First send Re-select target[] ; entering the re-select target modeStep 2: move the cursor x,y.Protocol: cmd data[5] 0X71; // tracking use ‘ ’ cursor0xXH ;X HIGT BYTEcmd data[9] 0xYL ;Y LOW BYTEdown cursor 2[] 0xYH ;Y HIGH BYTEngdcmd data[10] incmd data[8] cmd data[11] 0X00;nlX LOW BYTEaocmd data[7] 0xXL x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xb3};
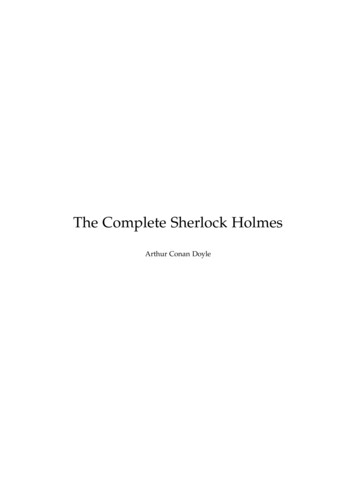
7. Stop trackingProtocol: cmd data[5] 0X00; // normal video modevideo mode[] e.comShenzhen Yangda Security Co., ,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x40};IR D ZOOM 1X0x81:1x ;0x82:2x; 0x83:3x ; 0x84 4x7e 7e 44 00 00 7D 81 00 00 00 00 00 00 00 00 00ngdCmd data[6] aoProtocol: cmd data[5] 0X7d; // IR digital Zoomnl8. thermal camera Digital Zoom cmd00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 0000 00 00 00 00 00 00 00 00 00 00 00 00 00 00 3E7e 7e 44 00 00 7D 82 00 00 00 00 00 00 00 00 0000 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00yaIR D ZOOM 2X00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 3F
ShenzhenYangdaSecurityCo.,Ltd 4)pelco-d_speed_mode Speed_mode _separate up FF01000800SPCS SP:SPEED,00 3F