Transcription
Introduction toAlgebraicGeometry
Introduction toAlgebraicGeometrybyJustin R. Smith
This is dedicated to mywonderful wife, Brigitte.c 2014. Justin R. Smith. All rights reserved.ISBN-13: 978-1503381537 (CreateSpace-Assigned)ISBN-10: 1503381536
Also by Justin R. Smith Eye of a Fly (Kindle edition). Constance Fairchild Adventures (published by Silver Leaf Books):– The Mills of God, hardcover.– The Well of Souls, (Kindle edition and paperback).Justin Smith’s home thauthor@gmail.com
Foreword“Algebraic geometry seems to have acquired the reputation of beingesoteric, exclusive, and very abstract, with adherents who are secretlyplotting to take over all the rest of mathematics. In one respect thislast point is accurate.”—David Mumford in [120].This book is intended for self-study or as a textbook for graduate studentsor advanced undergraduates. It presupposes some basic knowledge of pointset topology and a solid foundation in linear algebra. Otherwise, it developsall of the commutative algebra, sheaf-theory and cohomology needed to understand the material. This is the kind of background students might have ata school that emphasizes applied mathematics, or one where enrollment is notsufficient to run separate courses in commutative algebra.The first chapter is an introduction to the algebraic approach to solving aclassic geometric problem. It develops concepts that are useful and interestingon their own, like the Sylvester matrix and resultants of polynomials. It concludes with a discussion of how problems in robots and computer vision canbe framed in algebraic terms.Chapter 2 on page 35 develops classical affine algebraic geometry, providing a foundation for scheme theory and projective geometry. it also developsthe theory of Gröbner bases and applications of them to the robotics problemsfrom the first chapter.Chapter 3 on page 117 studies the local properties of affine varieties —material that is relevant for projective varieties as well.Chapter 4 on page 159 is an introduction to the language of schemes andgeneral varieties. It attempts motivate these concepts by showing that certainnatural operations on varieties can lead to objects that are schemes but not varieties.Chapter 5 on page 215 covers projective varieties, using material from chapter 3 on open affines. In the section on Grassmanians, it has a complete treatment of interior products.In the section on intersection theory, it revisits the classical problem introduced in chapter 1 and provides a modern treatment.In chapter 6, the book culminates with two proofs of the Riemann-Rochtheorem. The first is classical (Brill-Noether) and reasonably straightforward— introducing some elegant geometric concepts and results. The second proofis the modern one using the heavy machinery of sheaf cohomology and SerreDuality. Both are included because they give an instructor flexibility in approaching this subject. In particular, the sheaf cohomology of the second proofgives students a good idea of how the subject is done today.vii
Appendix A on page 329 develops almost all of the commutative algebraneeded to understand the rest of the book (specialized material is provided asneeded): students are only required to have an understanding of linear algebraand the concept of a group. Students with some commutative algebra can skipit and refer back to it as needed (page-references are used throughout the bookto facilitate this). It ends with a brief treatment of category theory.Appendix B on page 479 is an introduction to sheaves, in preparation forstructure sheaves of schemes and general varieties. It also develops the theoryof vector-bundles over an affine variety.Appendix C on page 491 develops the topological concept of vector bundles.Appendix D on page 503 develops basic concepts of homological algebraand applies this to sheaves and rings. It culminates with a proof of the SerreDuality theorem. Sections marked with a “dangerous bend” symbol are more advanced and maybe skipped on a first reading.Answers to roughly half of the exercises are found at the end of the book.Chapters 1 and 2 (with a sidelong glance at appendix A) may be suitablefor a semester of an undergraduate course. Appendix A has been used as thetext for the second semester of an abstract algebra course.Chapters 3 and 4 (or even chapter 5, skipping chapter 4) could make up thetext for a second semester.I am grateful to Patrick Clarke and Thomas Yu for many helpful and interesting discussions. Their insights and comments have improved this bookconsiderably. I am also grateful to people at mathoverflow.net for theircomments. The list includes (but is not limited to): Matthew Emerton, WillSwain, Nick Ramsey, and Angelo Vistoli.I am indebted to Noel Robinson for pointing out a gap in the proof of corollary 2.8.30 on page 111. Correcting it entailed adding the material on catenaryrings in section 2.8.2 on page 100. His questions also resulted in simpler and(hopefully) clearer proof of theorem 2.5.27 on page 86.I am grateful to Darij Grinberg for his extremely careful reading of the manuscript. He identified several significant errors.I am also grateful to Matthias Ettrich and the many other developers of thesoftware, LYX — a free front end to LATEX that has the ease of use of a wordprocessor, with spell-checking, an excellent equation editor, and a thesaurus. Ihave used this software for years and the current version is more polished andbug-free than most commercial software.LYX is available from http://www.lyx.org.
ContentsForewordviiList of FiguresxiChapter 1. A classical result1.1. Bézout’s Theorem1.2. The projective plane1.3. The Sylvester Matrix1.4. Application to Bézout’s Theorem1.5. The Mystic Hexagram1.6. Robotics11310152528Chapter 2. Affine varieties2.1. Introduction2.2. Hilbert’s Nullstellensatz2.3. Computations in polynomial rings: Gröbner bases2.4. The coordinate ring2.5. specm 2.6. Applications to optimization theory2.7. Products2.8. Dimension353539456271919398Chapter 3. Local properties of affine varieties3.1. Introduction3.2. The coordinate ring at a point3.3. The tangent space3.4. Normal varieties and finite maps3.5. Vector bundles on affine varieties117117117119145153Chapter 4. Varieties and Schemes4.1. Introduction4.2. Affine schemes4.3. Subschemes and ringed spaces4.4. Schemes4.5. Products4.6. Varieties and separated schemes159159161167180196203Chapter 5. Projective varieties5.1. Introduction5.2. Grassmannians215215222ix
xCONTENTS5.3.5.4.5.5.5.6.5.7.5.8.5.9.Invertible sheaves on projective varietiesRegular and rational mapsProductsNoether NormalizationGraded ideals and modulesBézout’s Theorem revisitedDivisors229237241256262269279Chapter 6. Curves6.1. Basic properties6.2. Elliptic curves6.3. The Riemann-Roch Theorem6.4. The modern approach to Riemann-Roch299299307317324Appendix A. AlgebraA.1. RingsA.2. FieldsA.3. Unique factorization domainsA.4. Further topics in ring theoryA.5. A glimpse of category theoryA.6. Tensor Algebras and variants329329373398406435470Appendix B. Sheaves and ringed spacesB.1. SheavesB.2. Presheaves verses sheavesB.3. Ringed spaces479479482486Appendix C. Vector bundlesC.1. IntroductionC.2. Vector-bundles and sheaves491491498Appendix D. CohomologyD.1. Chain complexes and cohomologyD.2. Rings and modulesD.3. Cohomology of sheavesD.4. Serre Duality503503518529545Appendix E.559Solutions to Selected ndix.Bibliography625
List of Figures1.1.1 A quadratic intersecting a quadratic21.1.2 Intersection of a quadratic and cubic21.2.1 Two circles81.4.1 Intersection in example 1.4.3 on page 17.181.4.2 A factor of multiplicity 2 in example 1.4.4 on page 19.201.4.3 Perturbation of figure 1.4.2 on page 20201.4.4 Intersection of multiplicity 2211.4.5 Intersection of multiplicity 3231.4.6 Intersection of a union of curves241.5.1 Hexagrammum Mysticum261.5.2 Grouping the lines into two sets261.5.3 Another Pascal Line271.6.1 A simple robot arm281.6.2 A more complicated robot arm302.1.1 An elliptic curve362.1.2 Closure in the Zariski topology382.2.1 An intersection of multiplicity 2432.3.1 Reaching a point572.3.2 Points reachable by the second robot arm602.5.1 Fibers of a regular map752.5.2 Flat morphism792.5.3 A rational function on a unit circle822.5.4 Parametrization of an ellipse882.5.5 Rationalization of the two-sphere892.8.1 Minimal prime ideal containing ( x )1103.3.1Tangent space1203.3.2Steiner’s crosscap1273.3.3A neighborhood1303.3.4Tangent cone1313.3.5Tangent cone becomes the tangent space132xi
xiiLIST OF FIGURES3.3.6A connected, reducible variety1393.4.1Normalization of a curve1524.2.1 Spec Z with its generic point1634.3.1 A nilpotent element1684.4.1 Gluing affines, case 11834.4.2 Gluing affines, case 21845.1.1 Affine cone of an ellipse2195.5.1 Blowing up2445.5.2 Blowing upA22455.5.3 Shrinking an affine variety2535.8.1 Minimal prime decomposition2715.9.1 Topological genus 22986.2.1 Three points that sum to zero315A.1.1 Relations between classes of rings349B.2.1 Branch-cuts483C.1.1A trivial line-bundle over a circle493C.1.2Constructing a vector bundle by patching494C.1.3A nontrivial line-bundle over a circle494C.1.4A nontrivial bundle “unrolled”496E.0.1 Perspective in projective space564E.0.2 Hyperbola projected onto a line571E.0.3575Steiner’s Roman surface
Introduction toAlgebraicGeometry
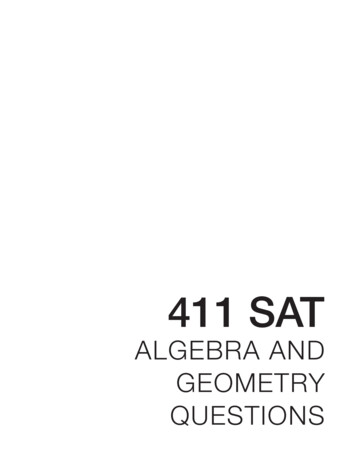
CHAPTER 1A classical resultAwake! for Morning in the Bowl of NightHas flung the Stone that puts the Stars to Flight:And Lo! the Hunter of the East has caughtThe Sultan’s Turret in a Noose of Light.—The Rubaiyat of Omar Khayyam, verse IAlgebraic geometry is a branch of mathematics that combines techniquesof abstract algebra with the language and the problems of geometry.It has a long history, going back more than a thousand years. One early(circa 1000 A.D.) notable achievement was Omar Khayyam’s1 proof that theroots of a cubic equation could be found via the intersection of a parabola anda circle (see [88]).It occupies a central place in modern mathematics and has multiple connections with fields like complex analysis, topology and number theory. Today,algebraic geometry is applied to a diverse array of fields including theoreticalphysics, control theory, cryptography (see section 6.2.2 on page 315), and algebraic coding theory — see [31]. Section 1.6 on page 28 describes an applicationto robotics.1.1. Bézout’s TheoremWe begin with a classical result that illustrates how algebraic geometry approaches geometric questions. It was stated (without proof) by Isaac Newtonin his proof of lemma 28 of volume 1 of his Principia Mathematica and was discussed by MacLaurin (see [106]) and Euler (see [44]) before Bézout’s publishedproof in [16].Étienne Bézout (1730–1783) was a French algebraist and geometer credited withthe invention of the determinant (in [14]).Let’s examine graphs of polynomials and the points where they intersect.Two linear curves — straight lines — intersect in a single point. A line and aquadratic curve intersect in two points and figure 1.1.1 on page 2 shows theintersections between4x2 y2 1andx2 4y2 1at 4 points.1The Omar Khayyam who wrote the famous poem, The Rubaiyat — see [47].1
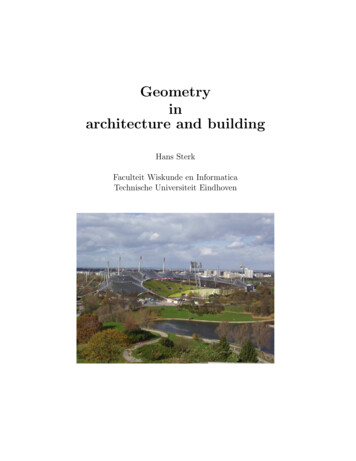
21. A CLASSICAL RESULTF IGURE 1.1.1.A quadratic intersecting a quadraticFigure 1.1.2 shows the intersection of the quadratic curve 1 23 1( x 2)2 25 y 510with the cubic curvey x3 6 x2 11 x 6at 6 points.F IGURE 1.1.2.Intersection of a quadratic and cubic
1.2. THE PROJECTIVE PLANE3Leonhard Euler (1707 – 1783) was, perhaps, the greatest mathematician all time.Although he was born in Switzerland, he spent most of his life in St. Petersburg,Russia and Berlin, Germany. He originated the notation f ( x ) for a function andmade contributions to mechanics, fluid dynamics, optics, astronomy, and musictheory. His final work, “Treatise on the Construction and Steering of Ships,” isa classic whose ideas on shipbuilding are still used to this day.To do justice to Euler’s life would require a book considerably longer thanthe current one — see the article [52]. His collected works fill more than 70volumes and, after his death, he left enough manuscripts behind to providepublications to the Journal of the Imperial Academy of Sciences (of Russia) for47 years.We arrive at the conjecture (that Newton, MacLaurin and Euler regardedas self-evident):C ONJECTURE 1.1.1. If f ( x, y) is a polynomial of degree n and g( x, y) is a polynomial of degree m, the curves defined by f 0 and g 0 intersect in m · n points.As soon as we state this conjecture, some problems immediately becomeclear:(1) The set of points that satisfy x2 y2 0 consists of the union of theline y x and the line y x. So, if f ( x, y) x2 y2 and g( x, y) x y then the intersection of the curves defined by them has an infinitenumber of points, namely the entire line y x.(2) the parabola y x2 1 does not intersect the line y 0 at all.(3) two parallel lines y 2x 1 and y 2x 3 do not intersect.The first problem can be solved by requiring f and g to have no common factor.In light of the second and third problem, one might be tempted to limitour conjecture to giving an upper bound to the number of intersections. On theother hand, the second problem can be easily solved by passing to the complexnumbers — where we get two intersections ( i, 0).We can deal with the third problem too, but we need to address anotherimportant geometric development.1.2. The projective planeProjective geometry extends euclidean geometry by adding “points at infinity” where parallel lines intersect. It arose in an effort to understand themathematical aspects of perspective — in effect, it is the geometry of the visualworld. It was also one of the first non-Euclidean geometries to be studied.The early development of projective geometry in the 1600’s was along thelines of Euclidean geometry, with axioms and theorems
“Algebraic geometry seems to have acquired the reputation of being esoteric, exclusive, and very abstract, with adherents who are secretly plotting to take over all the rest of mathematics. In one respect this last point is accurate.” —David Mumford in [120]. This book is intended for self-study or as a textbook for graduate students or advanced undergraduates. It presupposes some basic .