Transcription
Cinemática del RobotCI-2657 RobóticaProf. Kryscia Ramírez Benavides
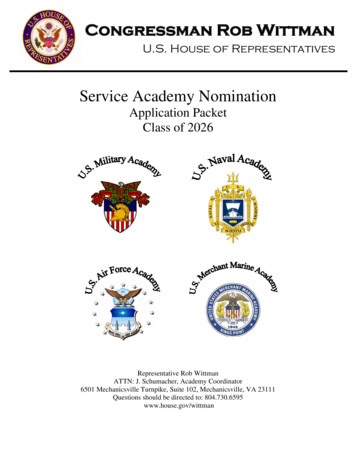
Sistema RobóticoCinemáticaDinámicaHardwareDiseño MecánicoActuadoresPlaneamientode TareasSistema de ControlSoftwareSensoresCI-2657 RobóticaCinemática del Robot2
IntroducciónCon el fin de controlar y programar un robotse debe tener conocimiento tanto de sudisposición espacial y un medio de referenciadel entorno.CINEMÁTICA. Estudio analítico de lageometría del movimiento de un brazorobótico:Con respecto a una referencia fija de un sistemade coordenadas.Sin tener en cuenta las fuerzas o momentos quecausan el movimiento.CI-2657 RobóticaCinemática del Robot3
Introducción (cont.)La cinemática del robot estudia elmovimiento del mismo con respecto a unsistema de referencia.Se interesa por la descripción analítica delmovimiento espacial del robot como unafunción del tiempo, y en particular por lasrelaciones entre la posición y la orientacióndel extremo final del robot con los valoresque toman sus coordenadas articulares.CI-2657 RobóticaCinemática del Robot4
odos de Control de MovimientosCI-2657 RobóticaCinemática del Robot5
Control Punto a PuntoUna secuencia de puntos discretos.Soldadura por puntos, recoger y colocar, carga ydescargaCI-2657 RobóticaCinemática del Robot6
Control de Trayectoria ContinuaSeguir un camino prescrito, control de la rutadel movimiento.Rociador de pintura, soldadura de arco, encolado.CI-2657 RobóticaCinemática del Robot7
o RobóticoCI-2657 RobóticaCinemática del Robot8
Brazo RobóticoSe puede definir como el conjunto deelementos electromecánicos que propician elmovimiento de un elemento terminal(gripper o herramienta).La constitución física de los mismos tienecierta similitud con la anatomía de lasextremidades superiores del cuerpo humano,por lo que, en ocasiones, para hacerreferencia a los distintos elementos quecomponen al robot, se usan términos como:cintura, hombro, brazo, codo, muñeca, etc.CI-2657 RobóticaCinemática del Robot9
Brazo Robótico (cont.)CI-2657 RobóticaCinemática del Robot10
Brazo Robótico (cont.)Una especificación general comprende: susgrados de libertad, su configuración y sucinemática directa e inversa.Estas especificaciones son dadas desde eldiseño propio de cada robot y su aplicación.Hay una clasificación de robotsmanipuladores la cual presenta lasdiferencias de diseño, precisión, precio, etc.CI-2657 RobóticaCinemática del Robot11
Brazo Robótico (cont.)CI-2657 RobóticaCinemática del Robot12
Brazo Robótico (cont.)También se le conoce con el nombre demanipulador mecánico o brazo manipulador.El brazo es una secuencia de cuerpos rígidosllamados elementos, conectados mediantearticulaciones prismáticas o de revolución.Cada par articulación-elemento constituye ungrado de libertad.Un concepto clave en robótica es el de grado delibertad (DOF – degree of freedom).Grado de libertad significa la capacidad de moverse alo largo de un eje o de rotar a lo largo de un eje.Entre más grados de libertad mayor dificultad paracontrolar al robot.En general un cuerpo libre en el espacio tiene 6 DOF,tres de traslación (x,y,z) y tres de orientación/rotación(roll, pitch and yaw).CI-2657 RobóticaCinemática del Robot13
Brazo Robótico (cont.)La mayoría de los brazos robóticos tienen6DOF, es la capacidad de moverse haciadelante/atrás, arriba/abajo,izquierda/derecha (traslación en tres ejesperpendiculares), combinados conla rotación sobre tres ejes perpendiculares(giro, elevación, desviación).El movimiento a lo largo de cada uno de los ejeses independiente de los otros, y cada uno esindependiente de la rotación sobre cualquiera delos ejes.CI-2657 RobóticaCinemática del Robot14
Brazo Robótico (cont.)CI-2657 RobóticaCinemática del Robot15
Brazo Robótico (cont.)Las articulaciones y elementos se enumeranhacia afuera desde la base; así la articulación1 es el punto de conexión 1 y la base.Cada elemento se conecta, a lo más, a otrosdos, así no se forman lazos cerrados.CI-2657 RobóticaCinemática del Robot16
Brazo Robótico (cont.)CI-2657 RobóticaCinemática del Robot17
Brazo Robótico (cont.)Articulación. Conexión de dos cuerposrígidos caracterizados por el movimiento deun sólido sobre otro.Grado de libertad. Rotacional o prismático.Enlace. Cuerpo rígido que une dos ejesarticulares adyacentes del manipulador.Posee muchos atributos. Peso, material,inercia, etc.CI-2657 RobóticaCinemática del Robot18
Brazo Robótico (cont.)CI-2657 RobóticaCinemática del Robot19
máticaCI-2657 RobóticaCinemática del Robot20
Dos Tópicos de CinemáticaCinemática directa (ángulos a posición).Datos de entrada:Longitud de cada enlace (elemento).Ángulo de cada articulación.Datos de salida:Posición de cualquier punto (es decir, las coordenadas(x,y,z)).Cinemática Inversa (posición a ángulos).Datos de entrada :Longitud de cada enlace.Posición de un punto en el robot.Datos de salida:Ángulos de cada articulación necesarios para obtener esaposición.CI-2657 RobóticaCinemática del Robot21
Dos Tópicos de Cinemática (cont.)Cinemática directa.Cinemática InversaCI-2657 RobóticaCinemática del Robot22
Marcos de ReferenciaMarcos de referencia del robot:Marco del mundoMarco de articulaciónMarco de la herramientaCI-2657 RobóticaCinemática del Robot23
Planeamiento de TrayectoriasConsidere un robot con un único enlace.Cinemática da una configuración para B.Elección de dos trayectorias para llegar allí.Es posible que desee especificar un puntointermedio, tal vez para evitar un obstáculo.CI-2657 RobóticaCinemática del Robot24
CinemáticaExisten dos problemas fundamentales pararesolver la cinemática del robot:Problema cinemático directo. Consiste endeterminar cual es la posición y orientación delextremo final del robot, con respecto a unsistema de coordenadas que se toma comoreferencia, conocidos los valores de lasarticulaciones y los parámetros geométricos delos elementos del robot.Problema cinemático inverso. Resuelve laconfiguración que debe adoptar el robot para unaposición y orientación del extremo conocidas.CI-2657 RobóticaCinemática del Robot25
Cinemática (cont.)Soluciones múltiples:Este manipulador de dos enlaces tienen dosposibles soluciones.Este problema se agrava más con los grados delibertad.Redundancia de movimiento.CI-2657 RobóticaCinemática del Robot26
Cinemática (cont.)No existencia de una solución:Una meta fuera del área de trabajo del robot notiene solución.Un punto inaccesible también puede estar dentrodel área de trabajo del manipulador, restriccionesfísicas.CI-2657 RobóticaCinemática del Robot27
Cinemática (cont.)CinemáticaCinemá ca directa Valor de lascoordenadas articulares(q0, q1, ., qn)Posición y orientacióndel extremo del robot(x, y, z, α, β, γ) Cinemá ca inversaCI-2657 RobóticaCinemática del Robot28
Cinemática Directa vs. CinemáticaInversaCI-2657 RobóticaCinemática del Robot29
Referencias BibliográficasFu, K.S.; González, R.C. y Lee, C.S.G.Robotics: Control, Sensing, Vision, andIntelligence. McGraw-Hill. 1987.Cinemática. r166/r78/r78.htmMartínez A. G. M.; Jáquez O. S. A.; Rivera M.J. y Sandoval R. R. “Diseño propio yConstrucción de un Brazo Robótico de 5GDL”. URL:http://antiguo.itson.mx/rieeandc/vol4p1 archivos/Art2Junio08.pdfCI-2657 RobóticaCinemática del Robot30
CI-2657 RobóticaCinemática del Robot31
¡Gracias!Dra. Kryscia Daviana Ramírez BenavidesProfesora e InvestigadoraUniversidad de Costa RicaEscuela de Ciencias de la Computación e InformáticaSitio Web:E-Mail:Redes Sociales:CI-2657 RobóticaCinemática del c.crkryscia.ramirez@ecci.ucr.ac.cr32
Hay una clasificación de robots manipuladores la cual presenta las diferencias de diseño, precisión, precio, etc. CI-2657 Robótica Cinemática del Robot 11. . es independiente de los otros, y cada uno es independiente de la rotación sobre cualquiera de los ejes. CI-2657 Robótica Cinemática del Robot 14.