Transcription
Medical Robotics and ComputerIntegrated Therapy Delivery: CouplingInformation to Action in 21’st Century SurgeryRussell H. TaylorDept. of Computer Science/Radiology/Mechanical EngineeringDirector, Center for Computer-Integrated Surgical Systems andTechnologyThe Johns Hopkins University3400 N. Charles Street; Baltimore, Md. 21218rht@cs.jhu.eduCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyThanks to many people J. AndersonW. BargarA. BzostekB. EldridgeG. FichtingerJ. FundaF. FrassicaR. GoldbergS. GomoryG. HagerL. JoskowiczY. KimR. KumarD. ShenC. RiviereD. YousemA. KalvinC. CuttingA. MorrisCopyright CISST ERC, 2000, 2001 J. LazarusD. LongK. MasamuneK. MurphyD. YousemB. JaramazA. DiGioiaA. LahmerM. BornerA. BauerA. BarnesP. JensenJ. YaoB. MittelstadtM. LiD. ShengD. RothbaumA. GueziecM. Talamini K. ChinzeiN. HataR. KikinisD. StoianoviciA. PatriciuL. WhitcombA. OkamuraC. DavatzikosE. AtalarE. ZerhouniL. KavoussiP. KazanzidesH. PaulJ. WenzE. DeJuanJ. Roy and many moreNSF Engineering Research Center for Computer Integrated Surgical Systems and Technology1
PredictionThe impact of computerintegrated surgicalsystems and technologyon medical care in thenext 20 years will be asgreat as the impact ofcomputer-integratedmanufacturing systemsand technology onindustrial production overthe past 20 years.Engineering Research Center for Computer Integrated Surgical Systems and TechnologyCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyBasic means for fulfilling prediction:systems that integrate information to action Provide new capabilitiesthat transcend humanlimitations in surgery Increase consistency andquality of surgicaltreatments Promote better outcomesand more cost-effectiveprocesses in surgicalpracticeCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology2
Basic means for fulfilling prediction:systems that integrate information to action Provide new capabilitiesthat transcend humanlimitations in surgery Increase consistency andquality of surgicaltreatments Promote better outcomesand more cost-effectiveprocesses in surgicalpracticeCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyComputersand networksImages & othersensor dataCommand &controlDecisionsupport &commandsInterface devicespatientCopyright CISST ERC, 2000, 2001Patientimages &treatmentplansTreatmentrecords &outcome datasurgeonNSF Engineering Research Center for Computer Integrated Surgical Systems and Technology3
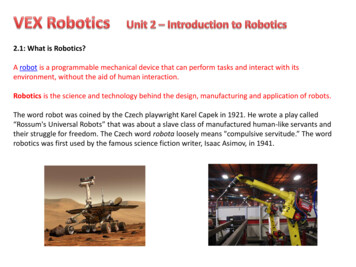
Update ModelPatient-specificModelUpdate ientCopyright CISST ERC, 2000, �CAD”Patient-specificModelAtlasPatientCopyright CISST ERC, 2000, 2001ComputerAssistedAssessmentNSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyIntraoperativeUpdate ModelUpdate uterAssistedAssessmentSurgical “TQM”PostoperativeNSF Engineering Research Center for Computer Integrated Surgical Systems and Technology4
icModelIntraoperativeUpdate ModelUpdate toperativeAtlasPatientCopyright CISST ERC, 2000, 2001ComputerAssistedAssessmentNSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyNSF Engineering Research Centerfor Computer-Integrated SurgicalSystems and Technology Multi-institution, multi-disciplinary center– Johns Hopkins University Medical Institutions– MIT Brigham & Women’s Hospital– CMU Shadyside Hospital University researchers, clinicians, industry Research, Systems, Education, OutreachCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology5
Medical ApplicationsEnabling systems,Validation & evaluationRequirements/ContextNovel therapy ideasEngineered CIS SystemsRequirements/ContextValidation of researchNovel algorithms& technologyEngineering ResearchCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyMedical robotics and CIS Systems Surgical CAD/CAMSystems Surgical assistedplanningUpdate ModelUpdate PlanSurgical ionPostoperativeAtlas Concluding remarksPatientCopyright CISST ERC, 2000Copyright CISST ERC, 2000, 2001Computer AssistedAssessmentEngineering Research Center for Computer Integrated Surgical Systems and TechnologyNSF Engineering Research Center for Computer Integrated Surgical Systems and Technology6
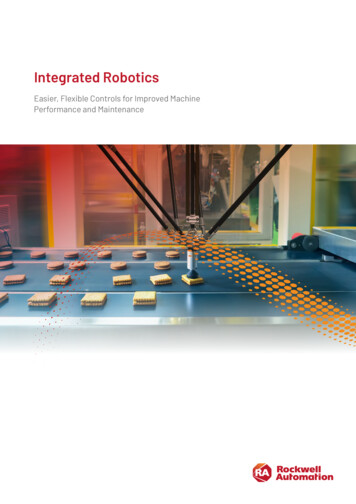
Surgical CAD/CAM Advantages Optimized planning Accurate andconsistent execution Safety Verification InformationmanagementCopyright CISST ERC, 2000, ningUpdate ModelUpdate PlanSurgical ionPostoperativeAtlasPatientCopyright CISST ERC, 2000Computer AssistedAssessmentEngineering Research Center for Computer Integrated Surgical Systems and TechnologyNSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyOrthopaedic Surgical CAD/CAMExample: Joint Replacement SurgeryPhoto: courtesy Brian DaviesCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology7
Urologic Surgical CAD/CAM Example:Robotic TURPPhoto: courtesy Brian DaviesCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyOptimized Local Therapy Deliver optimized patterns of localtreatments (e.g., radiation seeds,injections) with an image-guidedrobot Applications– Prostate, brain, spine, liver, bone,kidney .Photo: D. Stoianovici, L. Kavoussi Advantages–––––Accuracy of doseCost and time of procedureLower morbidityAvoid complicationsEnable new treatmentsCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology8
Example: Stereotactic NeurosurgeryNeuromate (ISS)IGOR (Lavallee, Troccaz, et al)Copyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyExample: RadiosurgeryAccuray Cyberknife Varian Clinac Copyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology9
Current ERC focus applicationsProstateLiverSpine 210,000 new/year25% men in lifetimeMets from colorectal130,000 new /year60,000 death /year 120 billion cost70% in lifetime 30-40% prostatectomy 20% radiation seeds 30-40% extracapsularCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyOne endpoint: 1-stop shoppingPre-opScreeningImagepatientand reatmentReimagevolume Follow up Statistics ProcesslearningCopyright CISST ERC, 2000, 2001MaintainTreatmentLogPost-opimagingNSF Engineering Research Center for Computer Integrated Surgical Systems and Technology10
Key Enablers Imaging– Image-based modeling & analysis– Integration of image sensors with deliverydevices for guidance and monitoring– Design points set for interventionsCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyExample: integrated MRI imagingand therapy delivery78 µm resolution !Beagle prostateCanine urethraPhoto: E. Atalar, JHUCombined endoscopic MRI coil & RF ablatorCoaxial transmission lineSurface coilLCRRF electrodesScannerE. Atalar, JHUCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology11
Statistical atlas of prostate cancerChristos Davatzikos & Dinggang Shen Labeled images* of 20 subjectsfor cancer and normal tissue Deformably registered imagesto average prostate (red) Computed spatial distribution ofcancer (green) Computed 5 needle positionsto maximize probability ofdetection Use statistical correlation ofcancer spatial distributions tooptimize pattern* Images provided by Jianchao Zeng , Georgetown U.Copyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyKey Enablers Imaging Robots & delivery aids– Modular designs– Compatible with imagingdevice– End effectorsSketch: Kirby Vosberg, Ferenc JoleszCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology12
Remote Center of Motion (RCM) 2 DOF Mechanicallyconstrainedmotion center Maintains entrysiteR. Taylor, D. Stoianovici, L. Whitcomb, A. BarnesCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyRemote Center of Motion (RCM) 2 DOF Mechanicallyconstrainedmotion center Maintains entrysiteR. Taylor, D. Stoianovici, L. Whitcomb, A. BarnesCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology13
Alternate RCM implementations:Parallel linkagesGoniometer arcsDavies, et al.NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyCopyright CISST ERC, 2000, 2001Clinical example Percutaneous access to kidney Radiolucent needle driver Robot aligns needle under x-rayfluoroscopy guidance Has been done both locally andremotelyD. StoianiviciPhotos: D. Stoianovici, L. KavoussiEngineering Research Center for Computer Integrated Surgical Systems and TechnologyCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology14
Photo: D. Stoianovici, JHU Urology DeptCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyX-ray/CT compatible robotsR. Susil, K. Masamune , R. Taylor, D. Stoianovici, G. FichtingerCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology15
CT-Compatible End-EffectorR. Susil, R. Taylor, J. Anderson, D. StoianoviciCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyPhantom Experiment Standard prostate phantom Demonstrated 1mm accuracywith robot from single CTimage targetingR. Susil, G. Fichtinger, K. Masamune, A.Patriciu, D. Stoianovici, E. DeWeese, R. TaylorCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology16
Clinical example Kidney biopsy Robot registered to CTfrom single image usingmarkers on end -effectorPhotos: D. Stoianovici, L. Kavoussi,A. Patriciu, S. Solomon(JHU Bayview)Other contributors: R. Susil, G.Fichtinger, K. Masamune,R. Taylor (JHU WSE)Copyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyClinical example Lung biopsy Robot registered to CT manuallyusing scanner alignment laserCredit: D. Stoianovici, L. Kavoussi ,A. Patriciu, S. Solomon,JHU BayviewCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology17
Ultrasound-Guided Robotically-AssistedProstate BrachytherapyBurdetteMedicalCISSTERCG. Fichtinger, D. Stoianovici, C. BurdetteCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyAdvantages Throughput Accurate andconsistent dosedelivery Verification Data capture ImproveddocumentationCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology18
Goal: An “Ideal” Brachytherapy System Safely performs allroutine tasks– Imaging– Volume definition– Dose calculation &visualization– Robotically-assistedseed placement– Data logging Leaves clinician freeto focus on therapyCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyIn-MRI Biopsy (FZK)Photos: Harald FischerFZ KarlsruheCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology19
Key Enablers Imaging Robots & delivery aids Integrated systemsCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyIntegration Example: Open-MRBrachytherapy System (BWH/MEL) MR-compatiblemechanicalmanipulator Pneumatic andultrasound motors 5 DOF holderCredit: K. Chinzei & N. HataEngineering Research Center for Computer Integrated Surgical Systems and TechnologyCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology20
LaserpointerProvided by Hata, Peters, Chinzei et al.Copyright CISST ERC, 2000, 2001Tempanyet al .Copyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyNSF Engineering Research Center for Computer Integrated Surgical Systems and Technology21
Open MRI robot system overviewRobot control PCSecuritymonitoring hostMR Compatible RobotHigh-Bandwidth NetworkIntraoperative MRI SystemVisualizationWorkstationPlanning SystemChinzei, Hata,Bzostek, Fichtinger, et al.Copyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyCT-guidedOpen MRI robot system overviewRobot control PCSecuritymonitoring hostCT Compatible RobotHigh-Bandwidth NetworkIntraoperative CT SystemVisualizationWorkstationPlanning SystemChinzei, Hata, Stoianovici, Fichtinger, Susil, Masamune Patriciu, Taylor, et al.NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyCopyright CISST ERC, 2000, 200122
Ultrasound-guidedOpen MRI robot systemRobot control PCSecuritymonitoring hostUltrasound RobotHigh-Bandwidth NetworkVisualizationWorkstationIntraoperative ultrasoundPlanning SystemChinzei, Hata, Stoianovici, Fichtinger, Susil, Masamune Patriciu, Taylor, et al.NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyCopyright CISST ERC, 2000, 2001Surgical CAD/CAM Examples Robot-assistedexecutionPreoperative– Joint replacement– Percutaneous ate ModelSurgical CAD/CAMPatient-specificModel Navigation-assistedexecution– Navigation systems forbrain, spine, ENT– Evolution: Informationenhanced minimallyinvasive surgeryCopyright CISST ERC, 2000, 2001Update ientCopyright CISST ERC, 2000Computer AssistedAssessmentEngineering Research Center for Computer Integrated Surgical Systems and TechnologyNSF Engineering Research Center for Computer Integrated Surgical Systems and Technology23
Update ModelPatient-specificModelUpdate ientCopyright CISST ERC, 2000, 2001ComputerAssistedAssessmentNSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyCutting, Bookstein, Taylor, et al.Copyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology24
Navigation SystemsPhoto: VTI Inc.Copyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyExample: “Virtual Fluoroscopy”Source: Sofamor Danek, Inc.Copyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology25
Example: Pedicle Screw PlacementPhotos: Orthosoft, Inc .Copyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyExample: Cup Placement in THR Navigation systemto set angle of cupcomponent in hipreplacement Potential to reducedislocations Used clinically atShadyside HospitalCopyright CISST ERC, 2000, 2001Source: Center for OrthopaedicResearch, Shadyside HospitalNSF Engineering Research Center for Computer Integrated Surgical Systems and Technology26
Example: Cup Placement in THRSource: Center for Orthopaedic Research, Shadyside HospitalCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyExample: “Virtual Fluoroscopy” Computer tracks patient,instruments, and x-ray c-arm Computer overlays real-timegraphics onto x-ray images Advantages– Reduced x-ray exposure– Easy to learn & use Limitations– 2D projections– Relies on accuratetrackingCopyright CISST ERC, 2000, 2001Source: Sofamor Danek, Inc.NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology27
Copyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyExample: Advanced Image OverlayPhoto: CMU and Shadyside HospitalCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology28
Medical robotics and CIS Systems Surgical CAD/CAMSystems Surgical ngPatient -specificModelIntraoperativeUpdate stoperativeAtlasComputerAssistedAssessmentPatient Some concludingremarksCopyright CISST ERC, 2000, 2001Update PlanCopyright CISST ERC, 2000Engineering Research Center for Computer Integrated Surgical Systems and TechnologyNSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologySurgical Assistant Examples Navigation-assistedexecution– May be viewed as“informationassistants” for surgery Robotic systems– Endoscopic surgery– Microsurgery Evolution: a grand fusionCopyright CISST ERC, 2000, 2001PreoperativeComputerassistedplanningPatient -specificModelIntraoperativeUpdate ModelSurgicalUpdate veAtlasPatientCopyright CISST ERC, 2000ComputerAssistedAssessmentEngineering Research Center for Computer Integrated Surgical Systems and TechnologyNSF Engineering Research Center for Computer Integrated Surgical Systems and Technology29
Skilled Tasks Situation assessment Task strategy & decisions Sensory-motor coordinationR. TaylorCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologySkilled Task Augmentation Situation assessment Task strategy & decisions Sensory-motor coordination Sensor processingModel ences &decision support Manipulationenhancementatlases Cooperative controland “macros”atlaseslibrariesR. TaylorCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology30
Research & Technology BarriersPerformance assessment Metrics & measurements Human baseline data System evaluationTask & task elementcharacterizationAugmentationSystemSystem infrastructure,integration, and enduser experienceatlaseslibrariesHuman-machine interfaces Displays & visualization Haptic input/output VoiceR. TaylorCopyright CISST ERC, 2000, 2001Robotics &cooperativecontrolSensor processing,modeling, andanatomical atlasesNSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyExample: Robotic endoscope Holders Robot holds endoscope Surgeon controls viewthrough various interfaces– Joystick or foot pedal– Voice recognition– Head or eye tracking Main current justifications– Labor cost saving– Somewhat steadier viewPhoto: Computer Motion, IncCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology31
R. Taylor, K. Gruben, J. FundaCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyR. TaylorCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology32
Example: Robotic retraction assistantCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyUltrasound Manipulation RobotsSalcludean ultrasoundsystemCopyright CISST ERC, 2000, 2001Hippocrate RobotE.Degoulange, et alNSF Engineering Research Center for Computer Integrated Surgical Systems and Technology33
High Dexterity End-EffectorCredit: Randy GoldbergR. GoldbergCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyHigh Dexterity End-Effector for UltrasoundCredit: Randy GoldbergCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology34
Copyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyVolume Scan DemonstrationCredit: Randy GoldbergCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology35
Volume Scan Demonstration - RotationCredit: Randy GoldbergCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyVolume Scan Demonstration - FanCredit: Randy GoldbergCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology36
Volume Scan Demonstration TranslationCredit: Randy GoldbergCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyApplications/Future Development Image volumereconstruction Real time tracking ®istration Ultrasonography skillenhancement “Third hand” forultrasound-guidedinterventionsPhoto: Randy GoldbergCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology37
Robotic Assistants for MicrosurgeryCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyMicrosurgical Assistant Develop human augmentationsystems to assist surgeons indelicate microsurgicalprocedures Applications– Eye, ENT, Neurosurgery, Vascular Advantages– Tremor, precision, force feedback– Information integration– New procedures (e.g., injectionsinto retinal vessels)Photo: D RothbaumrCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology38
Limitations of microsurgerySurgical microscopes– Resolution ( 30 mm)– Visible lightHuman sensory-motorperformance– Precision ( 15 – 20 mm)– Dexterity– Force/tactile sensitivityCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyReducing limitations will Increase performance Make new surgicalprocedures possible Make surgery better,safer, faster, cheaperCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology39
Current focus: mostly Eye & ENTEye:– Retinal vein cannulation– Retinal translocation– ENT:– Stapes prosthesis– Cochlear implant– MicrovascularNeurosurgery2 mm .Retina with occludedretinal veinCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyExample ProcedureRetinal Vein Cannulation: the insertion of a needleinto the lumen (interior) of a retinal vein or artery inorder to introduce theraputic drugs.Micropipette0.5 µmRetinal Vein100 um2 mmRetina with occluded retinalveinCopyright CISST ERC, 2000, 2001Cross Section of RetinaNSF Engineering Research Center for Computer Integrated Surgical Systems and Technology40
Stapedotomy drilling Have established surgicalsimulation station forevaluating stapedotomies Clinical problem is makingvery small hole in stapes(bone in middle ear)without damaging innerear Quantitative outcomemeasures– Compare robot-assistedversus unaidedprocedureCopyright CISST ERC, 2000, 2001D. RothbaumNSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyCooperative force guiding of surgical robotsPhoto: BGUPhoto: JHUCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology41
Steady Hand Guiding for MicrosurgeryKvHandleforceR. TaylorCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyR. Taylor, R. Kumar, P. Jensen, L. Whitcomb, J. RoyNSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyCopyright CISST ERC, 2000, 200142
Steady Hand Force Scaling ConceptKvHandleforceTip forceKhandleKtip -R. TaylorCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyR. KumarCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology43
High-resolution visualization sensorsOperating Microscope1 mm500 µm250 µm100 µmNext-generation endeffectorForce sensorsGRIN Lens EndoscopeGRIN LensMovieP. JensenCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyRobot as stable platform forintraoperative sensingFree hand motionSteady-hand motionMovies: CISST ERC, MADLAB, JHUR. Kumar, P. Jensen, G. HagerCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology44
positionsimagesR. KumarNSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyCopyright CISST ERC, 2000, 2001Real time imagefusion & overlayInformation-EnhancedMicrosurgeryGRIN lensendoscopy; OCT;tissue sensorsTissue & taskcharacterizationand modelingSurgicalknowledge stantSteady-handrobotic systemsMicrosurgeryAugmentationCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology45
Evolution: Integrate imaging and robots In-scanner visualization and guidance Steady-hand robots for ultrasound & instrument manipulation Applications include biopsies, ablations, MISR. TaylorCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyEvolution: Integration with imaging Combine robotic system with intraoperative imagersand navigation systems Applications include ENT, Brain, Spine, Bone, Misc. percutaneous*********Copyright CISST ERC, 2000, 2001X-ray US*****NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology46
Telerobotic Surgical Augmentation Surgeon manipulates“master” robot “Slave” robot mimicsmotions Typically systems have:– Force & positionscaling– Remote visualizationvia video Can be expensive butprovide improvedcapability for minimallyinvasive proceduresPhoto: Intuitive SurgicalCopyright CISST ERC, 2000, 2001Copyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyNSF Engineering Research Center for Computer Integrated Surgical Systems and Technology47
Evolution: Augmented Teleoperation Situation assessment Task strategy & decisions Sensory-motor coordination Sensor processingModel ences &decision support Manipulationenhancementatlases Cooperative controland “macros”atlaseslibrariesR. TaylorCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyExample: Robotic Knot TyingJohn Wen , et al., RPICopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology48
Medical robotics and CIS Systems Surgical CAD/CAMSystems Surgical AssistantSystems Concluding remarksCopyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyMedical robotics and CIS Systems Robots are simplyinformation-drivensurgical tools Their real potentialwill come from theiruse within thecontext of computerintegrated surgicalsystems. There is muchresearch to be done.Copyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology49
Research and technology barriersModeling & analysis Segmentation Registration Atlases Optimization Visualization Task characterization etc.Interface Technology Sensing Robotics Human-machineSystemsinterfaces Safety & verifiability Usability & maintainability Performance and validationNSF Engineering Research Center for Computer Integrated Surgical Systems and TechnologyCopyright CISST ERC, 2000, 2001How can we get there?Strong and committedteams– Surgeons– Engineers– IndustryFocus on systems thataddress important needsRapid iteration withmeasurable goalsHave fun!Copyright CISST ERC, 2000, 2001NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology50
The real bottom line: patient care Provide new capabilitiesthat transcend humanlimitations in surgery Increase consistency andquality of surgicaltreatments Promote better outcomesand more cost-effectiveprocesses in surgicalprac
Systems Computer-Computer Computer-Surgical "information Computer-Computer-Computer-