Transcription
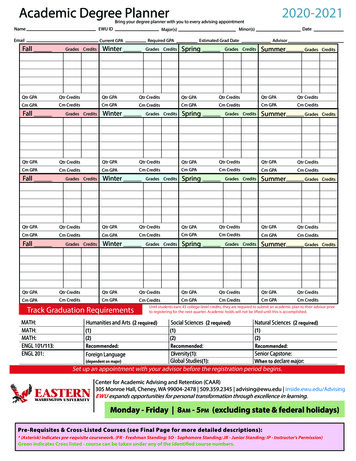
PHYSICS 110A : CLASSICAL MECHANICSHW 1 SOLUTIONS(2) Taylor 1.46(a) The equations of motion for the puck are:r R vtφ 0Assuming the puck is launched from the position φ 0. Technically with the polar coordinates this should only be correct until the puck hits the origin, but let’s assume at theorigin r turns negative and the angle stays the same.(b) Now the rotating disc only affects the φ direction. Our new equations of motion are:r0 R vt,φ0 ωtFigure 1: Plots for problem 2b with different z ωR/v. Blue: z 8, green: z 4, magenta:z 2.(3) Taylor 2.14We have from Newton’s second law:F0dv ev/Vdtm1
Separating this differential equation we come up with:ZvZtF00dv 0 e v /V dt0;mv00with the result:hivF0 t V e v/V.mv0Which reduces to:hi F t0.e v/V e v0 /V mVAnd:e v/V F0 t e v0 /V .mVAnd finally: F0 t v0 /Vv V ln e.mV(1)(b) By setting equation (1) equal to zero we get,1 F0 t e v0 /V .mVSince ln(1) 0. Solving this for t we have:t imV h1 e v0 /V .F0(c) Finally from equation (1): dxF0 t v0 /V V ln e.dtmVSeparating this we have: ZxZtF0 t00 v0 /V0dx V dt ln e;mVx00and we end up with:V 2mx (t) V t F0 F0 t e v0 /VmV lnF0 t e v0 /VmVPlugging in for t we have xmax :xmax mV 2 v01 (1 )e v0 /V .F0V2 v0 v0 /V e.V
(5) Taylor 3.11(a) Similar to text we can show:mv̇ ṁvex mg.(b) Noting that ṁ k we have:v̇ kvex g.m0 ktNote: m0 kt is the solution of ṁ k.The equation for v̇ is separable and we get:Zt v dt0kvexm0 kt0 gt.0This leads to: v vex lnm0m0 kt gt.(c) plugging in numbers we get: 900 m/s.(d) Depending on the circumstances, as noted in the discussion section, the rocket will eithernot take off at all, or will have initial negative velocity (e.g. will begin falling downward, orstay on the ground for a rocket at lift-off) and eventually overcome the gravitational forcewith its thrust.(6) Taylor 3.13Starting from 3.11 result:v vex lnmom0 kt gt.This is again separable to find x (t): Zt0x (t) x0 vex dt lnm0m0 kt0 gt2.20We can make this easier by expanding the natural log:Zt gt200x (t) x0 vex dt ln(m0 ) ln m0 kt .203
Then 1 gt2x (t) vex ln(m0 ) t (m0 kt) ln(m0 kt) (m0 kt) m0 ln(m0 ) m0 .k2Cleaning this up we get:x (t) gt2vex (m0 kt) ln(m0 ) (m0 kt) ln(m0 kt) kt .k2Which can be written as: 1 2 m(t) vexm0x (t) vex t gt .ln2km(t)Remember that m(t) m0 kt.(7) Taylor 4.2(a)Z1Z1Z1Z12W Fx (x, 0) dx Fy (1, y) dy x dx 2y dy 43 .0000(b) ZPhi Z1 22 dyW Fx (x, y) dx Fy (x, y) dy dx Fx (x, x ) Fy (x, x )dx00Thus,Z1 hi Z1 22W dx x 2x · x · 2x dx x2 4x4 01715.0(c) Z1 hZ1 i Z1 dxdy3 223 2W dt Fx (x, y) Fy (x, y) dt t · 3t 2t · t · 2t dt 3t8 4t6 dtdt0019210(8) Taylor 4.23To check if these forces are conservative they must satisfy two conditions. (1) They mustonly depend on position and (2) F 0. The first is satisfied in each case here and thesecond is satisfied for (a) and (b). Part (c) has F 2ẑ 6 0. A great way to find thepotential energy is as follows:ZxZyZz0000U (x, y, z) U (0, 0, 0) Fx (x , 0, 0) dx Fy (x, y , 0) dy Fz (x, y, z 0 ) dz 0 .0040
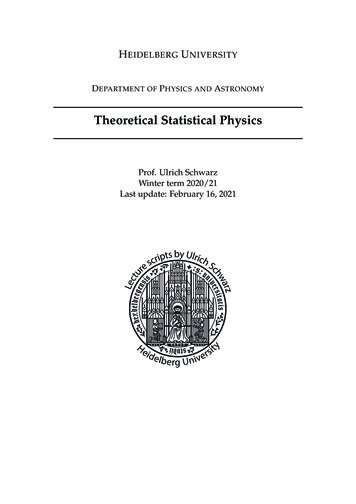
For part (a) this would look like:ZyZzZx0000U (x, y, z) U (0, 0, 0) k x dx 2k y dy 3k z 0 dz 0 .000Which leads us to:U (x, y, z) U0 21 kx2 ky 2 32 kz 2 .Which when taking the gradient brings us back to our given force. For part (b) we getU (x, y, z) U0 kxy through similar means.(9) Taylor 4.36(a) The potential may be written:Figure 2: Figure for problem 9.U M gH mgh.Substituting h b/ tan θ and H (l b/ sin θ) we have: bbU M g l mg,sin θtan θwhere l is the length of the string. This can be rearranged as: M m cos θU M gl gb M gl M gb u(θ)sin θwhereu(θ) 1 (m/M ) cos θsin θTaking the derivative with respect to θ we have: Ugb (M cos θ m) . θsin2 θ5
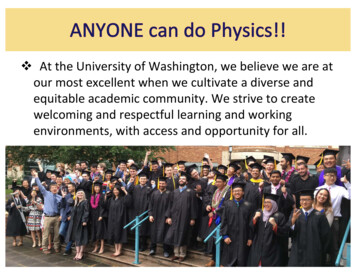
Setting this equal to zero leads to θ cos 1 (m/M ). Obviously in order to have a solutionwe must have m/M 1. However, there is another constraint we must acknowledge. Fromthe figure above it can be seen there is a minimum value for θ: θmin sin 1 (b/ ). So wesee we have three conditions (see also fig. 3): 2 1/2 1 bl2, then there is an equilibrium at angle θ cos 1 (m/M ). 2 1/2m(2) If 1 bl2 M 1, then the angle θ for which u(θ) is a minimum lies in theforbidden region θ θmin . The lowest energy configuration then occurs at the endpoint ofthe interval θ θmin , π2 , i.e.θ θmin sin 1 (b/l).(1) IfmM(3) If m M there is no solution to u0 (θ) 0. The equilibrium configuration is, as in case(2), at θ θmin sin 1 (b/l).Note that this problem can be solved with Physics 1 logic. The tension in the stringmust support both masses. For the mass m, the vertical component of the tension balancesgravity, hence T cos θ mg. For the mass M , the tension is directed vertically and T M g.Eliminating T , we have θ θ cos 1 (m/M ). If θ θmin , then the mass M is pulled allthe way up to the top. The tension in the rope still exceeds the gravitational force on themass M . But now since the mass abuts the pulley assembly, normal forces from the uppersurface are in play, and augment gravity (pushing downward) to balance the tension in therope.(10) Taylor 4.41Starting with the potential U krn we can take the gradient to find the force: nkrn 1 r̂.F UNow equating the magnitude of this force to mass times the centripetal acceleration (forcircular motion) we have:mv 2 nkrn 1 .rManipulating this we find:1nU1mv 2 nkrn 2226
Figure 3: Plot of u (θ) (Taylor 4.36) for different values of m/M with b/l 12 . Green:m/M 1; pink: m/M 1; red: cos θmin m/M 1; black: m/M cos θmin ; blue:m/M cos θmin . The dashed line shows the location of θmin sin 1 ( bl ) π6 .7
PHYSICS 110A : CLASSICAL MECHANICS HW 1 SOLUTIONS (2) Taylor 1.46 (a) The equations of motion for the puck are: r R vt 0 Assuming the puck is launched from the position 0. Technically with the polar coor-dinates this should only be correct until the puck hits the origin, but let's assume at the origin rturns negative and the angle .