Transcription
PROPUESTA DE AUTOMATIZACIÓN DE UNPROCESO FINAL PARA ENGRANESAUTOMOTRICESTESISPARA OBTENER EL GRADO:MAESTRO EN MANUFACTURA AVANZADAPRESENTAJOSÉ FELIPE MARTÍNEZ VALLEQUERÉTARO, QRO, JUNIO 2015.
1
2
3
4
5
6
Dedicatoria-Agradecimiento.Dedico este trabajo a mi esposa Treicy Evelyn Lopez Anaya, mi hijo Carlos EstebanMartinez López, a mi madre Maria Valle Oropeza, mi tío Luis David Martinez,familiares y amigos, que gracias a su apoyo me han motivado a seguir progresandode manera personal y profesional.De igual forma a la empresa TREMEC al Ing. Eloy Xaman Ek Castro Cárdenas y alIng. Eduardo Nicolas Soto Gonzalez y al centro de estudios CIATEQ, por dejar quelas personas continúen con su progreso, de manera especial al Dr. Guillermo Frades,al Ing. Rafael Ávila que fue quien reviso mi tesis junto el Dr. Raúl Ramirez Lopez, alIng. Fernando Talavera, a Geovani Gonzalez y Cesar Reséndiz.De igual forma agradezco a Dios por permitirme dar un paso más en esta vida.7
Índice de ContenidoPagina1.2.3.4.Introducción41.1. Antecedentes41.2. Definición del problema51.3. Hipótesis8Marco Teórico92.1. Concepto de manufactura92.2. Sistemas de visión102.2.1. Percepción natural y percepción artificial112.2.2. El sistema visual humano y los sistemas de visiónartificial.142.2.3. Esquema físico de un Sistema de visión artificial.152.2.4. Esquema lógico de un Sistema de Visión Artificial.212.3. Lavadoras de refacciones automotrices Industriales.242.4. Conceptos básicos de estadística.27Formulación del problema.323.1. Etapas del proceso de empacado de los engranes.323.2. Descripción de la operación.35Análisis de los procesos.458
4.1. Introducción.454.2. Ventajas y desventajas del modelo de simulación.474.3. Procedimiento484.4. Análisis numérico de pulido.525.Análisis de tiempos y movimientos de datos medidos.586.Simulación677.Simulación del modelo867.1. Actual867.2. Propuestas del modelo optimizado91Propuesta de mejora918.1. Propuesta 1928.2. Propuesta 2938.3. Propuesta 3948.4. Propuesta 4958.5. Propuesta 5968.6. Propuesta 6968.7. Propuesta complementaria978.9.Análisis económico10010.Retorno de inversión10811.Modelo Bibliografía12315.Anexos1259
1. INTRODUCCIÓN1.1. AntecedentesEn la actualidad diferentes competidores tanto nacionales como extranjeros hanestado llegando a nuestro país, por lo que el auge por las empresas automotricesy aeronáuticas ha crecido como nunca antes se había pensado, todo estodemanda más recursos, talentos y tecnologías que tienen que ser desarrollados ennuestro país.La automatización de los procesos industriales se ha convertido en una de lasmejores herramientas que han ayudado a la reducción sistemática de costos ytiempos de producción, logrando mayor productividad, con mejor calidad ydisminución de recursos.Con los modelos de manufactura integrada por computadora (CIM, ComputerIntegrated Manufacturing) en los que se basa esta tesis, pueden llegarse a simulardiferentes procesos cotidianos como: una planta industrial, la organización de loscarros en un estacionamiento, el flujo de personas en un centro comercial, el flujode carros en una ciudad, el tráfico aéreo, la entrega de correspondencia en unagran ciudad donde se desee minimizar distancias, etc. Todo esto se puede logrardiseñar por medio de herramientas electrónicas que nos proveen de manerarápida, confiable y económica un resultado para posteriormente tomar unadecisión y continuar con la integración de dicho análisis.En este trabajo se realizó la simulación de un proceso automotriz ayudado por elsoftware “FlexSim 6”, y un análisis de tiempos y movimientos que puede ser utilizadocomo base para un cambio en piso.El proceso a analizar es dentro de la empresa “Tremec” que pertenece al grupo“KUO” siendo una de varias empresas, uno de ellos es de giro automotriz,Transmisiones y Equipos Mecánicos SA de CV por sus siglas en español “TREMEC”ubicada en la ciudad de Querétaro, dedicada al ensamble y diseño de loscomponentes de transmisiones para equipos pesados; tiene instalaciones en10
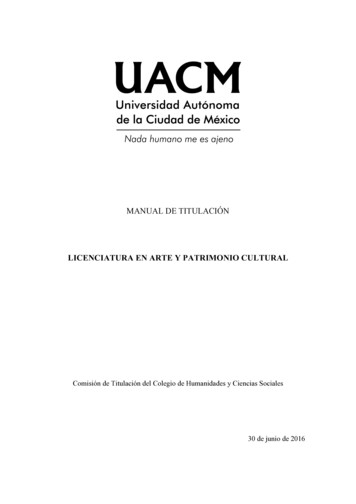
Loppem Bélgica y una representación comercial en Estados Unidos con alrededorde un total de 1,430 colaboradores, Exporta piezas a Estados Unidos, Canadá,Australia, Venezuela, China, Japón, India, Corea del Sur y varios países de Europa.Se especializa en el diseño y producción de soluciones para la transferencia detorques para la industria automotriz, agrícola e industrial. Los productos incluyentransmisiones manuales y automáticas, transmisión de clutch, engranes, flechas,clutches, sincronizadores y sistemas mecatrónicos con clutch integrado y softwarede control.“TREMEC” fue fundado en 1964, la compañía se enfocaba en la tomóvilesdepasajerosconvencionales, luces de camiones y vehículos comerciales. Al día de hoy TREMECestá posicionado en el mercado como el único proveedor en la gran demanda deproductos innovadores con una excelente calidad y precio.La empresa provee soluciones a los grandes cambios de la industria de maneraeficiente reduciendo emisiones al medio ambiente, con productos de bajo peso ytamaño compacto.Cuenta con múltiples certificaciones y reconocimientos tanto a nivel nacionalcomo internacional, su principal mercado son los vehículos ligeros, medianos apesados. Algunos de sus puntos clave son: El incremento de la eficiencia en lagasolina, reducir emisiones de gases tóxicos al ambiente, reducir el peso de laspiezas, un desempeño adecuado, costos competitivos, la disminución del ruido,vibración y amarre de las piezas dentro del carro.1.2. Definición del problemaEn la figura 1 se puede observar la transmisión completa y se ha señalado con unaflecha color negro el engrane (Figura 2) cuyo proceso final se analiza en estetrabajo. El objetivo es automatizar y optimizar su proceso final.11
Figura 1. Caja de transmisión de un camión de carga [1].Figura 2, Diseño de engrane producido.12
El proceso completo de fabricación del engrane se ilustra en la figura ntotermoquímicoRectificadode dientesEmpaqueMaquinadoen diámetrode carasLimpiadodeperdigonadoFigura 3. Proceso general de manufactura del engraneEl proceso a analizar es manual, el enfoque inicial es estudiar los movimientosinvolucrados como son los tiempos actuales, el proceso como tal y las habilidadesde los operadores para lograr una propuesta a un proceso automatizado, con elfin de mejorar el sistema productivo y poder aumentar la productividad del área,ahorrar espacio y tener un área más limpia.Debido a que los procesos manuales ocasionan “cuellos de botella” por la altademanda que se ha tenido en los últimos años, surge la necesidad de laautomatización.El proceso completo mostrado en la figura 3 es el siguiente: el material llega en forjapor parte del proveedor, es maquinado en CNC (Control Numérico porComputadora) para darle una primera forma, posteriormente se lava donde sequita el soluble de los CNC, se realiza un pre-tratamiento de fosfatizado para evitarla corrosión; después se realiza un tratamiento termoquímico para brindarle mayordureza al material y se realiza otra limpieza de éste a mayor detalle, en seguida semaquinan las caras de manera más fina mediante los CNC para dar el acabadocorrecto, posteriormente se da forma final a los dientes de los engranes y por últimoes empacado para ser exportado al cliente.13
La etapa de estudio a ser analizado y mejorado será el empaque, siendo el últimoproceso de la etapa en la figura 3, teniendo ya el producto terminado.1.3. Hipótesis.H1. Mejora del 20% en la producción y reducción de piezas mal manufacturadasde engranes sobre el proceso de empaque, mediante el uso de software desimulación.H2. Mejorar los tiempos y movimientos del proceso de empaque, pasando delsistema manual a uno automático en un 20%.H3. Lugar más limpio y ordenado con la implementación del nuevo layout.H4. Retorno de inversión menor a 2 años para poder llevar a cabo un proyectoformal dentro del área de empaque, cotizando con diferentes proveedorespara las diferentes etapas del proceso de empaque.14
2. MARCO TEORICO2.1. Concepto de Manufactura.La manufactura se deriva de las palabras latinas manus (manos) y factus (hacer);esta combinación de términos significa hacer con las manos. La palabra inglesa“manufacturing” tiene ya varios siglos de antigüedad, y la expresión “hecha amano” describe precisamente el método manual que se usaba cuando se acuñóla palabra [11]. Gran parte de la manufactura actual se realiza con máquinascomputarizadas y automáticas que son supervisadas mediante personal.La manufactura como campo de estudio en la actualidad, puede definirsemediante dos maneras: tecnológica y económica. Tecnológicamente es laaplicación de procesos químicos y físicos que alteran la geometría, laspropiedades, o el aspecto de un determinado material para elaborar partes oproductos terminados; incluye también el ensamble de múltiples partes. Losprocesos para realizar la manufactura involucran una combinación de máquinas,herramientas, energía y operaciones manuales, ésta se realiza con operacionessucesivas y ordenadas.Económicamente, es la transformación de materiales en artículos de mayor valor,a través de una o más operaciones o procesos de ensamble; el punto clave es quela manufactura agrega valor al material original, cambiando su forma o propiedad,o al combinarlo con otros materiales que han sido alterados en forma similar. Elmaterial se vuelve más valioso conforme se agreguen más operaciones a él.La palabra producción y manufactura se usan frecuentemente en forma indistinta.Producción tiene un significado más amplio que manufactura, producciónconlleva estudiar una parte de las operaciones, mientras que manufactura es unavisión con menor detalle.Aunque la manufactura es una actividad importante, no se lleva a cabo por símisma. Se realiza como una actividad comercial por parte de las compañías quevenden sus productos a los consumidores. El tipo de manufactura que maneja una15
compañía depende de la clase de productos que fabrica. Se puede explorar estarelación si examinamos primero los tipos de industrias de manufactura, eidentificamos después los productos que elaboran.Industrias manufactureras: son empresas que producen o abastecen bienes yservicios, pueden clasificarse como primarias, secundarias o terciarias.En este trabajo, el estudio será para la industria secundaria, el cual recibe bloquesde acero de la industria primaria para ser maquinado y éste puede ser utilizadopara el ensamble de un producto terminado siendo ya un producto final despuésdel maquinado [14].Se verá enfocado tres puntos los cuales son medulares para los cambios en laetapa de empaque, siendo estos: sistemas de visión, lavadoras industriales yoperaciones estadísticas. Con esto daremos una idea de lo que se desarrollainternamente en cada concepto.2.2. Sistemas de visión.La forma de visualizar objetos es mediante la luz natural, ésta utiliza fotones quegolpean los objetos y son básicamente reflejados a nuestros ojos, ellos sonencargados de procesar la imagen dejando pasar los fotones hacia la parteinterna de nuestros ojos.Sin la ayuda de la luz, no podemos observar nada. El ojo humano es un reflejo dela capacidad de adaptación de la naturaleza a nuestras necesidades diarias.Gracias a que la luz solar es transparente, pero básicamente es blanca, logracontener todos los colores, así podemos ver que un color blanco es una saturaciónde colores, un color negro es una ausencia de color, un color amarillo es unasaturación de cierta longitud de onda, dando por consiguiente un mundo dondesolo podemos ver colores, los animales como los murciélagos logran ver unafrecuencia muy diferente a nosotros ya que su adaptación ha sido más hacia a lasondas sonoras y así cada animal, tiene una visión del mundo muy diferente.16
Para nosotros los humanos, la visión ha sido un arma muy importante, ya que conella hemos podido observar al mundo, estudiarlo, replicarlo y analizarlo. Gracias aesto, es uno de los sentidos más evolucionados que tenemos, con ella tocamos almundo que nos rodea.2.2.1. Percepción natural y percepción artificial.Percepción natural: el ojo natural está compuesto principalmente por córnea, iris,pupila, retina, lente, nervios ópticos, fóvea, como se ejemplifica en la figura 4.Figura 4. Ojo humanoSu funcionamiento básicamente es: la luz del sol ilumina a los objetos mediante losfotones, estos golpean al cuerpo en estudio y es reflejado a nuestro ojo, éste captalos fotones, entrando primeramente por la córnea (el funcionamiento es deprotección ocular) el iris es de distinto color según la evolución humana, éste afectaa la intensidad de luz que deje pasar al lente de acuerdo a sus contracciones; ellente capta la imagen y la invierte, la imagen invertida es reflejada en los nerviosópticos que están compuestos por bastones y conos; Bastones sirven para saber ladistancia y los conos nos dan el color de los objetos, son transmitidos mediantepulsos eléctricos que viajan a los nervios ópticos hacia nuestro cerebro, en realidadel cerebro es quien procesa las imágenes. El cerebro cumple el factor másimportante ya que trabaja mediante la experiencia y puede relacionar cosas delpasado dándole un procesamiento mucho más complejo, así logra relacionar un17
día nublado con agua, sin que aún este lloviendo. Por lo que el cerebro es laherramienta más sofisticada que tenemos.Percepción artificial: como ojo humano a la persona es la cámara de visión a lamáquina.El funcionamiento es el mismo, el sol o luz artificial emite fotones, estos son reflejadosa los cuerpos y son recibidos mediante el sistema de visión que está compuestosegún la imagen, el filtro es una herramienta muy utilizada, ya que éste puede filtrarciertas longitudes de ondas que puede que nos interesen, es recibido a un sensorque, básicamente hoy en día existen solo 2 tecnologías líder, CMOS del inglés“Complementary Metal Oxide Semiconductor” con significado Semiconductorcomplementario de óxido metálico y CCD del inglés “Charge Coupled Device”con significado dispositivo de carga acoplada. Capta la imagen completa y cadasensor es excitado de forma distinta mandando impulsos al procesador de imagen.Ver figura 5.Figura 5. CCDPor lo tanto una imagen es: blanco, negro y a color, con lo que una imagen enblanco y negro está relacionada a una escala de grises que van desde el 0representado por el color negro hasta 255 en una escala decimal representado porel color blanco, ver figura 6. Dividida en cuadrados, estos cuadrados sondeterminados por la resolución del sensor de visión, llamados pixeles. Una imagen18
a color está compuesta de 3 sensores que detectan de la misma forma los 3 coloresRojo, Verde y Azul cada color va desde 0 hasta 255 en la escala decimal.Figura 6, pixeles.2.2.2. El sistema visual humano y los sistemas de visión artificial.La forma en que operan las cámaras de visión tiene ciertas diferencias con el ojohumano como: El ojo humano observa imágenes a 60Hz apreciándose como imágenescontinúas, la cámara de visión puede ver imágenes continuas. Contamos con mayor número de sensores que cualquier otro sistema devisión, por lo que podemos ver imágenes mucho más nítidas. Un sistema de visión está limitado por la capacidad de procesamiento. En la figura 7 se observa la relación en un robot, siendo el sistema de visióncomo el ojo humano, el programa como el cerebro y los músculos como losmotores.19
Figura 7.El sistema de visión puede observar rangos que para el ojo humano sonimposibles. La calidad de las imágenes en el ojo humano es mayor que la de un sistemade visión. El ojo humano tiende a cansarse en una actividad repetitiva, mientras queel sistema de visión puede trabajar infinitamente. Un sistema de visión depende ampliamente de la iluminación que se utilice.80% iluminación, 20% procesamiento de imagen. El ojo humano puede auto-enfocarse, actualmente existen lentes líquidosen el mercado, pero nunca serán tan sofisticados como un ojo humano. Las cámaras son más veloces que el ojo humano, el ojo humano detecta 30cuadros por segundos mientras que una computadora puede procesar 6mil cuadros por segundo, con esto podemos ver imágenes lentamente. El ojo humano tiene una resolución equivalente a 576 Mega pixeles, mientrasque las cámaras actualmente tienen hasta 50Mega pixeles.20
2.2.3. Esquema físico de un sistema de visión artificial.En la figura 8 podemos observar cómo está compuesto básicamente un sistema devisión:Esquema físicoEsquema lógicoFigura 8.Los esquemas físicos de los sistemas de visión Artificial “SVA” son [2]: La iluminación: Los objetos son iluminados a cierta frecuencia, siendo losLEDS una iluminación continua, ya que la lámparas fluorescentes o bulbosfuncionan a cierta frecuencia que pueden interferir al momento de capturarlas imágenes, la iluminación se divide en:1. Contraluces, se utiliza para resaltar los bordes de una pieza, lasaberturas de una pieza u ocultar materiales transparentes. Se coloca:Cámara, objeto, iluminación, ver figura 9.21
Figura 9, Contraluces. [2]2. Iluminación de barra, las luces de barra ofrecen una iluminaciónuniforme y lineal con flexibilidad para ajustar el ángulo de la luz enfunción de la aplicación. Esta iluminación es ideal para crearcontraste en la superficie de los materiales mate como papel, cartóno superficies rugosas. Se coloca la cámara, a cierto ángulo del objetoparalelo la iluminación y objeto, ver figura 10.Figura 10, Iluminación de barras.[2]3. Coaxial en el eje, son ideales para resaltar bordes y cambios de alturaen una pieza. También sirven para superficies de metal planas perono son ideales para superficies curvas. Las luces coaxiales son únicasa la hora de iluminar los objetos desde el mismo eje que el sistema devisión. Se coloca: Cámara, iluminación, objeto, ver figura 11.Figura 11, coaxial en el eje. [2]22
4. Anillo de campo oscuro, van los LED montados a 90 grados, resaltanlos bordes de una pieza y destacan los cambios de altura en unasuperficie al brindar un mayor contraste, la luz debe estar muy cercadel objeto. Colocan: cámara, iluminación y objeto, ver figura 12.Figura 12, anillo. [2]5. Difusa: la iluminación difusa brinda una iluminación pareja y sinsombras. Este tipo de iluminación se utiliza con mucha frecuenciasobre superficies redondas, especial sobre superficies curvadas demetal brillante. La iluminación difusa oculta los cambios de altura desuperficie y crea una apariencia plana. Se coloca cámara,iluminación y objeto, ver figura 13.Figura 13, difusa. [2]6. Anillo de bajo ángulo: ofrecen un gran contraste en los objetos conborde elevado, lo que brinda mayor flexibilidad a la distancia detrabajo con luz en comparación con las luces de anillo de campoobscuro. Las luces de anillo de bajo ángulo son especialmente ideales23
para utilizarse en superficies brillantes. Se coloca cámara, iluminacióny objeto, ver figura 14.Figura 14, anillo de bajo ángulo. [2]7. Anillo: esta iluminación cubre una gama muy amplia de aplicacionesy su uso es muy versátil. Brindan una iluminación sin sombras, ya queel anillo cubre una totalidad del área de trabajo y son un tipo deiluminación muy común en la industria de visión artificial. Se colocacámara, iluminación y objeto, ver figura 15.Figura 15, anillo. [2] Cámara, ésta recibe la reflexión del objeto sobre un sensor CMOS y CCD:[1] el sensor CMOS (Complementary Metal Oxide Semiconductor o, enespañol, Semiconductor Complementario de Óxido Metálico) seencuentra en las cámaras más actuales y la mayoría de las profesionales.24
Sus características son:Mejor desempeño en una estructura más simple, sin necesidad de másequipo. Menos sensible a la luz, pero un consumo mucho más bajo deenergía, por lo que las cámaras son más económicas. Ver figura 16.Figura 16. Sensor CMOS[2] el CCD (Charge Coupled Device o, en español, Dispositivo de CargaAcoplada). Este tipo de sensor lo tienen la mayoría de las cámarasdigitales y significa que:Es sensible a la luz y trabaja a manera de líneas de pixeles con unacobertura de los colores primarios (RGB).Es más sensible a la luz que el CMOS.Consume más energía, así que la batería puede agotarse más rápido.Captura un rango más amplio de tonos (luces brillantes, tonos medios ysombras) en las fotografías. Ver figura 17.25
Figura 17. Sensor CCDAsí que resumiendo estos puntos indicaremos las ventajas de uno sobre el otro:a) Los sensores CCD crean imágenes de alta calidad con poco ruido digital; lossensores CMOS son más sensibles.b) Los CMOS consumen menos energía; un sensor CCD puede llegar a consumirhasta 100 veces más energía que el CMOS; esto hace que la batería dure más enuna cámara con este tipo de sensor.c) El tiempo necesario para tomar una foto y poder verla es más rápido en cámarascon.CMOS.d) En realidad, ninguno es mejor que el otro, simplemente son sensores que aportancaracterísticas distintas a cada una de las cámaras digitales. La tecnología actualha hecho que el sensor CMOS (en teoría, inferior al CCD) se acerque a una calidadmuy semejante al CCD por lo que, para el ojo humano, las diferencias son casiimperceptibles.26
2.2.4. Esquema lógico de un Sistema de Visión Artificial. Objeto: es la etapa de construcción del sistema de formación de fotográficas(iluminación, óptica, cámaras, filtros, pantallas.), las características visualesde los objetos (formas, texturas, colores, sombras.). El éxito de muchasaplicaciones depende de un buen diseño en esta primera etapa. Ver figura18.Figura 18. Foto sin filtro Adquisición: El objetivo es mejorar la calidad informativa de la imagenadquirida. Se incluyen operaciones de: mejora de la relación señal-ruido(denoising), SNR; De atenuar las imperfecciones de la adquisición debido ala función de transferencia del sistema de captación de imágenes(deconvolution); De regularizar la imagen; De mejorar el contraste o deoptimizar la distribución de la intensidad (enhancement) o de realzaralgunas características de la imagen, como bordes o áreas. Ver figura 19.Figura 19. Foto con filtro27
Procesamiento: es la fase donde se fracciona la imagen. Actuación: el sistema de visión mediante el software envía señales a algúnPLC o sistema de control para tomar las decisiones pertinentes que serequieran. Ver figura ientoBase deconocimientoObjetoSeñal de salidaActuaciónTabla 1, aplicación delos sistemasde visión artificialFigura20.Área aAplicaciónaplicaciónInspección deproductosIdentificaciónControl de de SoldaduraRobóticaDescripciónSe puede llegar a inspeccionar todo tipo deproductos, papel, aluminio, acero, etc.Piezas faltantes, mal maquinadas, falta de etiquetassobre el producto.Inspección de Reconocimiento óptico decaracteres o mejor conocido por sus siglas en ingles“OCR” (Optical Code Read).Verificar que los circuitos estén correctos.Verificar sobre las frutas o verduras, golpes, que noestén descompuestas, color, empacadascorrectamente.Que la soldadura sea continua.Guía dePosicionamiento de algún brazo robótico sobrevehículoscierta posición que pueda variar.Posicionamiento Posicionar una pieza sobre algún robot.de piezas28
Marcado decódigos 1D o 2dAutomotrizInspección de los códigos correctamente impresosy que la información coincida con alguna base dedatos.Inspección sobre una línea con alta cadencia.Inspección depiezas en líneaInspección deInspeccionar que estén las piezas correctamenteempacadocolocadas antes de ser empacados.Reconocimiento de placas (patentes) de vehículosConteo vehicularOtrosConteo de MonedasConteo de FigurasMedición de distancia de objetos con puntero láserConteo de líneas (horizontales, verticales, diagonales)Reconocimiento de código de barras de productosConteo de micro-núcleos en células sanguíneas.Ventajas de los sistemas de visión artificial:- Reducción de rechazos e incidencias en la producción.- Aumento de la productividad.- Aumento y fidelidad de clientes.- Mejora de las relaciones con los clientes.- Mayor compromiso con los requisitos del cliente.- Organización del trabajo.29
2.3. Lavadoras Industriales para refacciones automotrices.Básicamente las lavadoras industriales para piezas automotrices se dividen encuatro tecnologías:a)b)c)d)Lavadora de monorrielLavadora de bandaLavadora de mesa rotativaLavadora de canasta(a) Lavadora de monorriel:Los transportadores suspendidos o transportadores de monorriel son construidos convigas tipo I. estas vigas actúan como un carril cuyas alas inferiores soportan y sirvende pistas de rodadura para las horquillas de suspensión que están espaciados aintervalos regulares pudiendo ser cada 50 o 60cm dependiendo del diseño, unidosa una cadena unos pocos centímetros por debajo de la viga. El transportador tieneun recorrido con una o más curvas dentro de la planta volviendo a su punto departida dependiendo del diseño requerido. La cadena es movida a una velocidadconstante por un mecanismo (o quizás por más de uno) ubicado en algún punto alo largo de su recorrido. Los materiales a transportar son colocados en ganchos,cestas o bandejas sujetas de las horquillas. La viga I puede ser colocada en posiciónvertical u horizontal, permitiendo a las horquillas subir hasta el techo o bajar hastael nivel de trabajador en cualquier punto deseado. Estas características permitenque operaciones sucesivas sean situadas en puntos muy distantes. Es decir, unapieza puede completarse y colocarse en el transportador siendo lavado en variasestaciones el cual sean retiradas por el operario que ha de realizar las siguientesoperaciones.El hecho de que esta clase de transportador pueda elevarse hasta el techo deledificio, bajando ocasionalmente para el subministro a los puestos de trabajo, esventajoso desde otro punto de vista: el almacén de la obra en curso se convierteen “almacén móvil” que eventualmente llegará hasta el operario sin requerir la30
atención ni el trabajo del personal que aprovisiona los materiales. En muchasfábricas se diseñan estos transportadores con una longitud muy superior a lanecesaria para llevar los materiales de una operación a otra. Esto simplementeproporciona una gran capacidad de almacenamiento para los materiales queutilizaran los distintos operarios.El transportador elevado no es mucho mejor que cualquier otro tipo detransportador. Tiene problemas y dificultades en instalación y su funcionamiento.(b) Lavadora de banda:Las lavadoras de banda como su nombre lo dice es una banda transportadoradonde se coloca y esta es transportada del punto A al B, utilizando la fricción, porlo general las bandas son de plástico con alma de acero para incrementar su vidaútil. Son diseñadas de acuerdo a las medidas de la pieza que se requiera lavar.Uno de los problemas es que movimiento no es siempre uniforme, tendiendo aproducirse saltos cuando envejece la cinta. Incluso cuando es nueva, las paradasy arranques tienden a hacer caer las piezas. A menudo, los proyectistas aplican unfactor de seguridad para evitar este problema, un dispositivo comúnmenteaceptado, que parece dar un adecuado grado de protección, consistesimplemente en limitar el ángulo de inclinación de la cinta transportadora demanera que una línea vertical que pase por el centro de gravedad de la pieza queesté subiendo, caiga dentro del tercio central de la longitud de la base.Otro problema que se presenta en la instalación de cintas transportadoras es elproblema de doblar una esquina cuando el transporte de los materiales lo requiere.Esto puede conseguirse de varias maneras. Se puede utilizar una caída porgravedad curva que unas dos cintas transportadoras que estén en ángulo.También se puede emplear un tramo curvo de un trasportador de rodillos, o sepuede instalar una mesa giratoria. Hay muchas otras soluciones posibles, pero estasson probablemente las más comunes.31
Otra desventaja que se puede observar para el caso de estudio de esta tesis esque el engrane existe mayor área de contacto que de la lavadora tipo monorrielpor lo que existe la posibilidad de que éste no pueda ser lavado al 100% o querequiera mayor presión para el enjuague.(c) Lavadora de mesa rotativa y giratoria:Este tipo de mesas están siendo introducidas en la actualidad para el manejo dere-trabajos o volúmenes de baja producción para la industria automotriz, por subajo costo de construcción y facilidad de transportarla por la planta.Básicamente trabaja introduciendo la pieza en una lavadora en forma de cilindro,realiza la limpieza con alta presión de agua combinada con químicos con el fin deremover la suciedad, tiene un ciclo programado el cual puede alargar o acortar eltiempo de limpieza para una mejor calidad.Sin embargo, para este tema puede ser una solución para uno de los pasos delempacado, pero la calidad que el cliente demanda no es factible ya quedemandaría un tiempo de lavado muy grande, sin embargo puede llegar aremover un gran número de partículas en poco tiempo ayudando a el procesocomo un prelavado.(d) Lavadora de canasta:Las lavadoras de canasta tienen una función practica cuando se requiere lavardiferentes partes a un volumen bajo, ya que estas son introducidas de maneramanual y puestas en una canasta para después ser lavadas, terminando el procesose pueden extraer una a una para continuar el proceso, las diferentes lavadorasvarían según la tecnología para ser programadas o con tiempos predeterminados.32
2.4. Conceptos básicos de estadística.Estadística: Es una ciencia que analiza series de datos (por ejemplo, edad de unapoblación, altura de un equipo de baloncesto, temperatura de los meses deverano, etc.) y trata de extraer conclusiones sobre el comportamiento de estasvariables. Es una de las ciencias que permite conocer, o al menos entender, larealidad en la que nos desenvolvemos. A través de la estadística podemos
Concepto de manufactura 9 2.2. Sistemas de visión 10 2.2.1. Percepción natural y percepción artificial 11 2.2.2. El sistema visual humano y los sistemas de visión artificial. 14 2.2.3. Esquema físico de un Sistema de visión artificial. 15 2.2.4. Esquema lógico de un Sistema de Visión Artificial. 21 2.3.