Transcription
Tel-Aviv February t7th,1982 and Haifa, February 18
l.(;lrl'i'Xri iu»,»,Hcinv Er ri)"rge[O'Center, )A ;;\, acttec r1 ese;HchAbstract--The s t.at u s of concepts LInd techniques for thedesign of on-iboa rd f light path management systems isreviewed.Such systems are designed to Lnc r en s eflight efficld1cy and safety by auccmartng the op t.L''m.t za t I cuLLghc procedures on-board aircraft.After ;l brief rev i co, of the origins and functions Itsuchterns, the paper describes two complementaryf or- attilcking the key design p rob l era,namely, the s ynr nee ts o f efficient trajectories.One raet hod opt r s i aes en route, the other opt i rm z e st e r.ntna I a r ee flight; bo t h methods are rooted inop t Lma l ron r ro l theory. Simulation and fIf gb t t e s rresults ar e reviewed to illustrate the potentia] 0these systems for fuel and cost savings.e L\;.J,\{;E jL\T"Lel d, Cn l ifor-n iaa i rs.p e ed , c r u i s.e ai r spead , climb airspeed,descentirspeed, respectively, ftlseelipor knot sga i r crart ",'eight, lh , and total fuel consumed,, respectively.climb djs ta.nc e , descent disvariables, r e sp ect ive l.vdL;L\1Ce,tane"'{dnInitial and finalcccrd Lna t c.s in(artesian system, Yfunit cost of fuel and time, S!ib, S/sec,r esooc.r Lve l ydrag force,dde s i r-ed range, cruise range , climb range,descent range, respectively, ft or n.d,dup ln lelbDoptminimumf c rot s t cost withcx ergy, r e.spe ct i ve l.yt or:'1'g]e,meas u recirealtive tofus(lage r(ference directicnupminimumenergy at which cruise cost tswith respect to airCi\\L'.", cost,"'- tn rcs tenergy, initial energy,i n.a l energy, an druise energy, respectively, ftcoordinates inuf attack, degflightpiit hdn Ln i.t.ia I and.iua !Car r c sian sv s t em-n t ro l varLJblesieration of gravi.ty, ft/secgb jnk a ,gle, deg;-Lm::Llti n i an , also ground head ins' depending or; contextJ;-'h,bf.r.,,E'ftial and final ground headi, g,spoct i velvLt Lcc.toin i. t Lr I .rl r Lcud«r csp ecr i ve!rrfLna l .ttri -";'de, el0ingto establish theengineering.admired his brilliantou.tut.Lcc :I'he r efo r e , I amn rivilegedto be able to payt s t by deLi.ver i ng th",'iert t,t. u rc.lb"1:;F-nbr i 1 i a n r:i en t I f Lc ca r e e rit, d emi nen r.Lv t c theic rc, «ut Lcc l engineering; he';( founding several ofro bcl i e ve thilt ve ce heLnr e r es r. in"-/1i ::h com- rlb1t[ghtono,tnC.e.'iC;,i0Vlo'r, myt i'.il.flu-, pJpL'fi\ ded;lred a work 01 !il(' LS. GoverHIlH;'nf andil;vre!'in' i-, in til" public d(Hl1aint hLs a pp roachnc r e.s d e r isresu]t --sta t.e ur
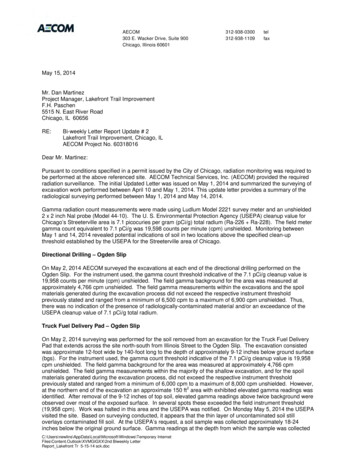
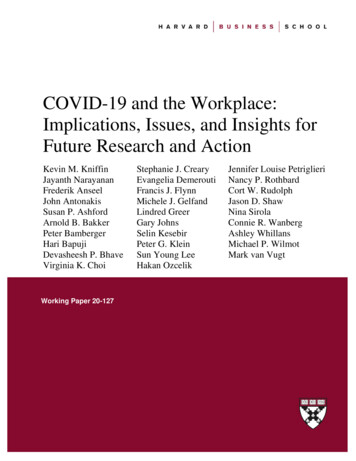
d i,'I','.!"d"c,mh, ddedtii[r,-dul.udu l ci'"rnun(],',d. Le-d bvther,t. t'REAL TIMEIl.itINPL' SPERFORMANCE CRIHRiONWiNDSCOORDI1\iATES 0 ' NEARBY A-CAUT(lf'ILOTORDER {,NO TIMEINPUTOAT A SASEAT PERFORfI,ANCE. . . j ;--t---i ST M ROUTE STRUCTURE CONSTRAINTS, FLIGHT RULES HRRAIN:AIRSPACE MODELSr: ucu-,ifr. r ithe al go r i :systems c L J 1 be.i.mpl cnenta t i " ,Ames Ros ear ch Cent.cr .ti on and - j i g f [ r cs rs wil )'f these systems t('mi s s ior-s .r rr r c'dis c,v.t,nsit.:) S)indm.I1\ ., 1: c,di.!it,-;(SdL'-l\ '"'1.1'1;\-d.l.rThe paper seglns with inr 1L::d u.j t h ·',;n;l 'cT;id1ttions and generiltrocr urcin.pl i i : ",-h',,;n] .impl emc-n rrt ton , t ucsystems.t wol cmontr-robl om s :ana \'00 is1 i \.',h1:.1'::1\']'rltW{'('; .a rar.c s.cr-rv11:C',11r c:rop.u!in i L .i r r .r r r : tnc'iel-r I''pcLltl(n ll onvc,l , P ' andt h; c ompu r e r.i nformat i on rcuui.r c-dcicnt ai r c raft ope ro r i.: n .1'1,,'r-cn l t Lme- Lnr.nrs in ''is.s rot.ucv arc' Lroqucn r. 1 upd;ltcdthe pi 1,the ruvil:,dti,"tu ;l vr. und C;lir"nchPc)-h lD-;center.on ta inc-drrspacomodsrJ"i':1 tcr-rnjJ-'!'"1.1);'\.J,nd j ri , q:--,r
grri,.; the'I' .ucut. ,'"hor i zonrn i windgruunu t ra, k d i rcc- L i on .Th'('dI1 I)C';JfUIKt.i'·I) )J al t.Lt ud o, butqu.mt Lt vdvnarnir- ctls 'f 'wind Shl':H dS ccl l db llw 'J(·rt.l cn 1 compoocut 'f Lhe win d do not pla v a signifie'dl1cfO,( lh'rl .mdr o nvglc'ctcd.In i i rplan c.r,, unl i k rin 111,st t.vpc-, '.If mis silc., , 11','fl,,'W "w.in,:, 1.p 1'1'burn r s r t- ,i \'l' I Y 1 ,""" .md d.«., not. nocd l u bemode led o y ;jln-s t.cad , the 'Ol"wlchanging\il.'t.cr d i sturb.rncc-:, .i l,'h;n:! c'::-;;u,,:Lrm.m,I» r'ndtLhvtC'1.',\ \'". 1(.1 tinnr)(int.de'.sn trlgge'r d r c.v i si c.nt h. ltdi,,'ct, ry bv tlu.r.,li T'J]d 1"n1-:', till'i.e"'t,11Ih'i('ip,ll)rr"tln"](;1\' .'111t,('::;,1l l';I"11)\J;h'tll"lCiI'(h.1dL-;i;;n ·d " 'rC'cur rt-nt !- -: "Lit i' n(':11p).)le-r--;t,: ".-.' '.-(,'1.',fcsc,"ih,:h ;t;ite',f the' .s r\":,\";;fd t.!«.nthI);c'the 'unc:c"ns out l jnc-d .tbove , ,;n-bt,;lfdl/it),)nr rat cc t o r-Le.sfiCc-l-;,d till'' 01] i ghtnt i'1('("it lies at the hc.v r tf the;;;;;:C(Tknt - rob Lem,In air}'peLot 1, ''is j I.;'J'refa)LJ,'vd that the raos t us etu) p criortnanc cr- i'.-hieh] co s t ,t h,fuel c-os rLime coe. t , :ht t i rm\lns»c,'cJli\.'d.t Jrnl'a r e spu:is oLt ing(:1rncct .rn af rl i nel I gIlLIn'r In ;lssi led landing time sim ii ticd . i r r i va l time i 'rest,');Lc Is c.mvcn Lcnr to cepardLe t ra j ecr o rv pruba n to n,.';'las s c-s ; namc l , cr' r c.ut e problems',,;'itL iLf ghtp.r rh., longer them app roxLma t e l v :JO n . mi.)nc) t.cr eu.n.rj a r ea p robl ems with paths shor t e r t hanSO "). mi .In en HHJte fJight, the paths art' predominantly long seeti' ns of straight lines wiLhnegligIble percentage ·)f the -light time spent inturns.Thu:'-"tu rn r ng dyn:w1ics em be ncgl cc t ed andvertIcalane dvndmics need t be modeled In(lptimizing the en route case.This problem isstudied in the next section.In r er-mi na l ca r-eaflight, verticil and ru r-n ing;lneU\i.'rs tend ti' ')ctursLsU]LH1t'(H)sly imd 1.n comp;lrab!e time intolval",.n us the 0Vrldm:lcs of both types ()f 'Ti\Jtliln must beled Ln trajectory t,)ptimizatiun.This m, ro difficult prohldYi 1s studies last.A1ttHlugh s'iulLm[" both "'rob!cms havi' been c)rcied inli' simulilCinnand flight tests, the erging of the]utiansreqUired ir' :l full-mission fIightpath;HugdJienlsystem r"cmains tel be dccomplishr:,j.In till;'; pdp"r 1.)",fu r thor s impl i i c-d hv '('11':J1n;'1,,:.; l.;i I. Cspeed .t n t ,ani:il t i t udo dl1dd1(-:) )Ili i ere:sub s.t. t '-I.Fe'i "E:", .\(l)ci thrc ;Pi.'ltrid (;!in to E1"r 1:W('j)i"The ronr r-o ! ";1rLdJI('S in I:n(6) .r r c ai r s p eodand t urus tT, i r itr clnt cd qucntr t v , t.Irro t t l csettingTh.is is thl' (J-cal]ed cnt'rgy-stdt'·odel , vht , h IUS beenusod in trajectoryopt irni z.a t i \1'1 probIems .Its utility d;:'.jjtndsfit r-elv on the- na t ur e 'f the application.thequasi-slcildy t r.r jec r.or f cs commonl v found in C j i rsb ,crllisc, and descent of tranSDort aircraft, theene r gv-x tat e modol provides es occte t ly ;implc«n-bca r.J ,11 ,:ori.l"nms , as we shall sec.pre\)j ,us section, che most i.mpor t an t periia t ha tiflthmana aeraen r we r e enumerated.These criteria c t ! l beshown here to be cs scn t ia l Ly equ i va l on t when f o rmaar ed as problems in .pt i ma l conr r o j .Inrm.mc crrcrars,on-bca rdLghrpaConsider fLrst the minimum-cost criterion withspecified r.lnge to fly and no explicit constrainton flight time.This criterLn can be written as;In intcIgr,,] c( c;t function:ft 1 P ct(7)oh1 i t h Eqs.# iiamilconil'!1t" F,-int m,lSS Hjlhlti m 11 'T1 lh'n 'ur fli,L"htthe ve,tital plane C:ln he written ;ISdV/dt9(T - D)/W - 9 5Jns 1.n(6) as the Slate equdtions,Ci ntru]" is(4) ;mcthe,n ,)1 optim;,]inCxt(V V )w(8)(1 )(2)In n()rm;l! flight 11\ 1 jer,,; ;( Lr:ll1spcrt ;Ii rCl-;lft theflightpdth :ingle L i tdre ';uch tiut!g - 1 :mdt[lCSC i'(;lditi'ns alL'w us t,', Llke flight:1 t h ;jn ; Icontre I viJ,i;;blc \---'ith lift (,';lcu':H",d fr"11\ tlic'tr;int'" l,' '('Sand t,'"f,J:-:i.mit.c li lC ('OS:lct 'rsLh, arA'·,fe equHl' i: n un 1 t \'e! f (sm,] 11'iT;t hv ;;ir), em1n, JukJ bv(':i)whc,reE and"lre the eestates.On an extremumtrajccl"ry t!leItonL n achieves its minimumwi.th respect Lt' the controlsV and T, and thecostates ,)bey tlw 1 inca, differentL1I equaticH'ls'Fo(l0)SLice ;P0cifenergy and range de thei.0a1 time:lrc c:pceLfic·d, t.he ";lIUi}S of the (ostates attf"r,rcv C()l1SLjn[;;, which an ')sed to determine thed"",j,t'rJ f.i.nal sL,tesE; ;,nd il jThe proper choice
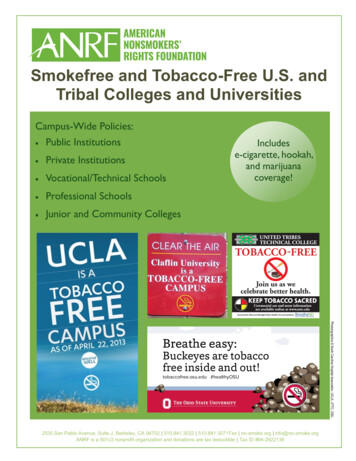
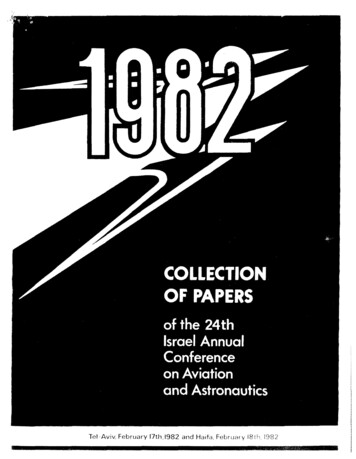
if thcs c (.'onst:)nt,"; (',nrc!:s('S t t.e h'cll-·k'i"wH Lwr'point boundar v ";1\)( pr'"b ,'1'1pti rr.aI (:;.,tl""l.Thv s olur ior,t h i , r-,,]']w i j] bf ;nUres ;('() inthe next s ect ionBcc,u c 1.1:(' firLil t ,ur.ron-.s t "lined , the Hami t on .tn,hc\" thr- c':1Cliti'H1H Iifora]]whereasHovev c-r,r.': it\otf-tiHt'F:is,:J const.n ri.Sni,t1h'CC'CENERGYE, II(11 jfmHti"c'ti"lendct('n]("!; ;}r -L1',"j,-,tf""r-,jtctC Lq.(9',along the trajtc.rv to(,j-E\E).E:Ujtll'"provides a first intC\!J!] and vhc» corub i.ncd withEq . (8) yields'F "lgebr-'ji(;l]ly.j(11)1----- CRUISE dIIII :r- - !- . .Rf,NGE "Fig.Finally, consider the minimum f ueI performanceindex, Ct 0, with fixed final time and no c on-:s t r a t nt on range. This problem occurs in generatingminimum fuel delay maneuvers.Here the transversality conditions of optimal control require - x '" 0(Ref. 4) and a particular solution willllyyield a nonz c ro FI, say i\, and some rangeHowever. this solution wt l I be identical to thefree-time. fixed-nIl1ge problem in whichC t '" -(\and df '" d f ·SimpIi ied----(14 )where Ei and Efare the given initial climb andfinal descent energies, respectively.The transformation uses the assumption that the energychanges monotonically in the climb and descent.This pteces strict inequality c ons t rc.Int.s on s , asshown in Eo . (14).Also in Eq . (4), the integration limits have been reve rs ed in the descent costterm.In this formulation the cost function is ofmixed form, containing two integral cost terms anda t e rm ina I cost term contributed by the cruisesegment.With the change in independent variable frumtime to energy, the state equation for specificenergy is eliminated, leaving Eq , (4) as the onlystate equation.Furthermore, we note that theperformance function (Eq . (4» depends on the distance state x only through the sum of the finalvalues of climb and descent distances d u p ddnTherefore, the ct.ar c equa rt c.» for the d t s t anc e isrewritten in terms of this sum:!lpproa .b.We now introduce the app roa ch of Ref. 3 byassuming that the trajectories are composed of threesegments; n2m ly, d climb, a cruise 2t constantspecific energy, and a descent, as illustrated inFig. 2. The cost function (7) can then be writtenas the sum of the costs of the three segments.climb costAssufTic'd structure of optimum trajectories.)whereis atant'r- each t ra j ocr orvbutforconstantoh rainod for a pa r t Lcu l a rfixed-time optimum tlajectt ry, ene can defineC C t - C tand consider the same tr"jectory alsl'to be a solution ef the free-time problem, with C treplaced byObviously, the time-cost factorcannot beindependent l y in the fixed-timeproblem.Thus, the fixed-time problem with specifiedrange makes physical sense only for the minimum fuelpe r-ro rteance index, Ct '" O.Moreover, every fixedtime, minimum fuel problem can be formulated as afree-time problem with the t i.me-ecos r factor C trho s en so as to ach t ovo the desired final time.The essential equivalence of the various problems implies we c an c.onc en t ra r e , without loss ofgenerality, on algorithms that solve the free-finaltime problem.r DESCENT,dd r crr ou',pcc(1Solution Based on a--- IICUMB, dUllas Eq . (7) but v i t h rbe f i na l time tiThis changes on I Eq. (11), khi.ch live-om", tP cit( 1 3) descent cos twhered e s t gna t cs the cost of cruiSing. cit avenspecific energyNext, we r r ans ror-rr, the integ ra I cost terms in(13) by changing the i octepcndent variable from t r raei i t c en e r gv , us i ngthe t r an s f o rma t t on dt ""wdn ) (:I f-""iiI(j S)Here, the transformation dtdElE WdS used aga t n .Also, Eq , (J5) provides for independence in thespecification of the climb and descent wtud velocities Vvcp and Vwdn'General Iy , different windconditions will p r ev a i I Ln physically differentlocations of climb and descent.The wind vcl oci t j e-,can a l s o be altitude dependent.The effect ofa l t i t.udc-cde-pendc-n t winds "1'1 the opt.Lrnum t ra jectc!ricsis discussed in Ref. 5.Neces s a rv conditions for' the mi ni mizat ion 0Eq. (lL;), subject ro the state equn t i on U: ;, (J5yi.eld the f,-llowLng cxpn' :.si()ns ror- the rt.uni t ton an:Ind cost"tc equations, rcspcctivclv'
In bot.uthe' rh.lC,'ot,\ cos r a r c det er - inesp:,rtlCli!r rallgc. ince the functiunalr ela t ionsh l p j'ct'",ei'n th,·:.:'r i ahl es c.moot bederc rnLncd inluc;,,(] turn. it is necessary to .i t e ru.c on the c os r r t e v.rlue tn -rd cr t o achieve aspecified range cli.dn- , dn( 16).r. / dF:- I\H/ -o'K(If)rh" fbmi 1t on ian is minimized with respect t.oU",) p.r i.rs o r con t r-oI vnriabl es , one pai r ;1pplicableto] i.rnbandand the «her to descentand dntha r t h ro t t l e-ose-t c i egh.m r : rust Ls used dS a control variable.Ln gt,lL'Ld. thrust and fuel flow are nonlinearfuncticlns ofas well as of altitude, Mach num-:ber, and t cmpe rat ur e .Since each term under t herat o Lai.aac tc.i. cpe ru r o r in Eq , (16) coata i ns only oneof the two pairs of control variables, the minimization simpli.fics into two independent minimizations,-n c Lnvo Iv ing climb controls, the o t.he r , de s c cn tcontruls.Also, since the right-hand side of thecostate equation CEq. (17») is zero,is constant.rhe las r. necessary coud i r ion app l j rab Le tothis furmulation is obtained by making use of thefact dut the final value of the rime c-Li ke independent. variable E lS free.Its final value is t eupper limit of integration Ecin Eq. (14).Applicatiin of the free final-time transversality condition in R( L 4 prcv Ldes the fol loc Lng condition:-dup(9)txext \ i(, examine the r reueve cs.a l t t.v conditionsIpplicable to this formulation.The basic cons t ra int in this problem is that the range of thet r aj e c r o rv bedf.Howev e r , d fis athe transformed cost t
Lc Is c.mvcnLcnr to cepardLe t ra jecro rv prub-an to n,.';' lass c-s ; namc l , cr' r c.ute problems ',,;'itL iLfghtp.rrh., longer them approxLma t e l v:JO n . mi.)nc) t.creu.n.rj a r ea p robl ems with paths short e r t han SO "). mi . In en HHJte fJight, the paths art' pre dominantly long seeti' ns of straight lines wiLh negligIble percentage ·)f the -light time spent in turns. Thu .