Transcription
NRPla .on:KojiKamei(JARA/ATR)Co- ma.onDay,Burlingame,Dec.11,2012
Copyright(c)2012JARA/ATR
Introduc.ontoRobo.cLocaliza.onService(RLS- RobotLocaliza.onService(RLS- ATR
ula.onandhuman- ‐robotinterac.on.Copyright(c)2012JARA/ATR
Challengingissuesintheexample Somesensorsonlyprovidepar.alloca.oninforma.on.– readercanonlyprovideproximityinforma.on. Sensoroutputsarenotalwayscorrect.– nmissit. efforts.– .Copyright(c)2012JARA/ATR
RLSFeatures prefix)– sage.– BasedonthewidespreadGISstandards.(ISO/TC211) Architecturepackage(RoLoarchitecture)– robo.cusage.– onsforposeoriden.tyinforma.on.– Structuresforrepresen.ngerrores.ma.on. DataFormatpackage(RoLoformat)– Dataformatsforforma ngandexchangingresul.nglocaliza.ondata. Interfacepackage(RoLoservice)– – orma.on.Copyright(c)2012JARA/ATR
10- ‐02- ‐03)2011/06:finalreportfromRLS1.1- ed.(formal/2012- ‐08- 2012JARA/ATR
ChangesinRLSversion1.1 Bugfixes Poserepresenta.onextended– forma.on.– dinthenextversion(incoordina.onwithISO/TC211). Iden.ty(ID)Informa.onextended– esentedinnumericalvaluesandsymbolicvalues UsageexamplesextendedCopyright(c)2012JARA/ATR
Introduc.ontoRobo.cInterac.onService(RoIS- ‐1.0)Specifica.onSu- ‐YoungChi(ETRI),Young- Copyright(c)2012ETRI,AIST,JARA/ATR
ServiceRobotsinOurLivingEnvironment Possiblerobo.cservices:– Recep.onserviceattheentrance– Guideserviceinmuseums– Homesecurity– Childcare/Nursingrobots– Elderlycarerobots,etc. (c)2012ETRI,AIST,JARA/ATR
DtagDetec.onlegcontrol Recep.on Guide Homesecurity Childcare TRI,AIST,JARA/ATR Humandetec.on Facedetec.onandrecogni.on Speechrecogni.on Humantrackingandfollowing Soundsourcelocaliza.onetc.
looseconnec!onthroughstandardAPIsHRIEngine
c)2012ETRI,AIST,JARA/ATR
ght(c)2012ETRI,AIST,JARA/ATR
InterfacesdefinedinRoISFramework SystemInterface– onandHRIEngine. EventInterface– changesinHRI- ‐Enginestatus. QueryInterface– forma.onitholds. CommandInterface– ngine.Copyright(c)2012ETRI,AIST,JARA/ATR
HRIfunc.onsforRobo.cServices Robo.cservicesrequireHuman- ‐RobotInterac.onfunc.ons– Tounderstandthesurroundings,suchas Persondetec.on,Personiden.fica.on, Sounddetec.onand Speechrecogni.on,Sensor- ‐relatedfunc!ons Speechsynthesis, Reac.on, Naviga.onandFollow.Actuator- ‐relatedfunc!ons– Toprovideservices,suchas TRI,AIST,JARA/ATR
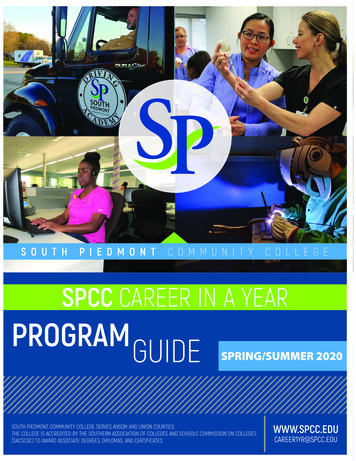
15BasicHRIComponentsSensor- ‐relatedComponentsActuator- ‐relatedComponents名称機能名称機能System InformationAcquire the system statusSpeech SynthesisGenerates robot speechPerson DetectionDetect number of person(s)ReactionPerforms specifiedreactionNavigationMoves to specified targetlocationFollowFollows a specified targetobjectMoveMoves to specifieddistance or curvePerson LocalizationDetect position of peoplePerson IdentificationIdentify person(s)Face DetectionDetect number of face(s)Face LocalizationDetect position of face(s)Sound DetectionDetect number of soundsourcesSound LocalizationLocalize sound source(s)Speech RecognitionRecognize spokenlanguageGesture RecognitionRecognize iders)canprovideHRIfunc.onsnotlistedhereasUser- ight(c)2012ETRI,AIST,JARA/ATR
/08:RoIS1.0Beta1published.(dtc/2011- ‐08- ge)2012/09:RoIS1.0Beta2published.(dtc/2012- ‐06- pyrightTokyo/(c)U2niversityoJfARA/ATRTsukuba
UNRPla ormasojwarepla c)2012JARA/ATR
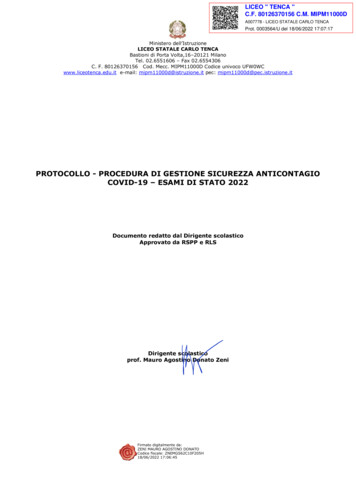
NetworkedRobotSystem(2004- ‐2009)Unconscious- ‐typeRobotssensorsembeddedinenvironmentsVirtual- ‐typeRobotsagentsinvirtualspacesVisible- inreal-worldenvironmentsCopyright(c)2012JARA/ATR
3)One location(NR)Multiple locations (UNR)Hospital,Rehabilita!oncenter, Human- ‐RobotInterac.on2004- ‐2009Multi- singhome, Oneloca.ontoMul.- ‐loca.onUbiquitousNetworkRobotsPlaIormTele- ppingmall,Sta!on,
2012JARA/ATR
dTele- pinessCopyright(c)2012JARA/ATR
UNRPla orm plica.ons. tsinavarietyofplaces. neachother.Copyright(c)2012JARA/ATR
UNRPla PLATFORMServiceCue・・・High RoIS)RobotRegistryOperatorRegistryHigh RROBOT(e.g.implementedbyRTM)・・・
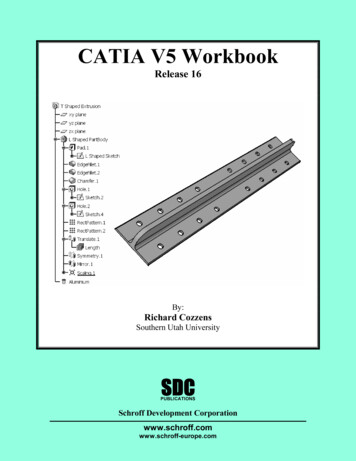
Two- ‐LayerPla ormArchitectureRobotic ServicePla ormRobotic ServiceSpa.alMasterComponents/ServicesRobotic Service Management(Global (multi-area) Integration)Local Platform(Location B)Robot Registry (global)Service Registry (global)Resource ManagementService RegistryLocal Platform(Location A)Map RegistryUser RegistryStatus: 4W Who/When/Where/WhatNetwork ype RobotsCopyright(c)2012JARA/ATR
Standardiza.onRobotic ServicePla ormRobotic LRobotic Service Management(Global (multi-area) Integration)Local Platform(Location B)Robot Registry (global)Service Registry (global)Resource ManagementNR- ‐PFNR- ‐PFService RegistryLocal Platform(Location A)RLSMap RegistryUser RegistryStatus: 4W Who/When/Where/WhatNetwork irtual-Type RobotsCopyright(c)2012JARA/ATR
OGCCityGML OGC:OpenGeospa.alConsor.um CityGML:CityGeographyMarkupLanguage– AnopendatamodelandXML- itymodels– CityGML1.0(2008/08) org/files/?ar.fact id 47842Copyright(c)2012JARA/ATR
ITU- ‐TSG16/Q25F.USN- ‐NRP Func.onalrequirementsforNetworkRobotPla orm ITU- ‐TSG16Q25(USN:UbiquitousSensorNetwork) OriginallyproposedasNRP(NetworkRobotPla orm)thenexpandedtomul.- ‐loca.onUNRarchitecture. )2012JARA/ATR
Robo.cServices-Shop guidanceShopping supportTouring ht(c)2012JARA/ATRHealthcare
.3,pp.28- inghfp://dx.doi.org/10.1109/MNET.2012.620121331
UNRPla ormAlphaRelease URL– hfp://www.irc.atr.jp/std/UNR- ‐Pla orm.html AlphaReleaseincludes – Pla ormSystem– Spa.alMasterDatabaseSystem– SamplePrograms SampleComponentandService SampleScenarioforComponentAlloca.onOpenSource– Documents UserGuide(Howtosetupandexecutesampleprograms) ProgrammingGuide(HowtouseAPIlibraries) pyright(c)2012JARA/ATR
Cloud%Networked%Robo.cs 31. May%2012% Special%Issue%on%Machine%and%Robo.c%Networking hfp://dx.doi.org/10.1109/MNET .