Transcription
To appear in International Conference on Intelligent Robots and Systems (IROS),San Francisco, September 2011.Autonomous Intersection Management: Multi-Intersection OptimizationMatthew Hausknecht, Tsz-Chiu Au, and Peter StoneDepartment of Computer ScienceThe University of Texas at AustinAustin, TX � Advances in autonomous vehicles and intelligenttransportation systems indicate a rapidly approaching futurein which intelligent vehicles will automatically handle theprocess of driving. However, increasing the efficiency of today’stransportation infrastructure will require intelligent trafficcontrol mechanisms that work hand in hand with intelligentvehicles. To this end, Dresner and Stone proposed a newintersection control mechanism called Autonomous IntersectionManagement (AIM) and showed in simulation that by studyingthe problem from a multiagent perspective, intersection controlcan be made more efficient than existing control mechanismssuch as traffic signals and stop signs. We extend their studybeyond the case of an individual intersection and examine theunique implications and abilities afforded by using AIM-basedagents to control a network of interconnected intersections.We examine different navigation policies by which autonomousvehicles can dynamically alter their planned paths, observe aninstance of Braess’ paradox, and explore the new possibility ofdynamically reversing the flow of traffic along lanes in responseto minute-by-minute traffic conditions. Studying this multiagentsystem in simulation, we quantify the substantial improvementsin efficiency imparted by these agent-based traffic controlmethods.I NTRODUCTIONIncreasing numbers of vehicles burden today’s transportation infrastructure, often resulting in substantial transportation delays. As roads become increasingly over-utilized, newsolutions to old traffic problems are in high demand. Simultaneously, as advances in Autonomous Vehicles and IntelligentTransportation Systems begin to lay the foundation for afuture of computer-controlled vehicles, so too must we workto improve the mechanisms which coordinate the flow ofvehicles on existing networks of roads.To this end, Dresner and Stone introduced a multiagentsystems approach to traffic intersection management calledAutonomous Intersection Management (AIM) in which vehicles (driver agents) call ahead to a reservation manageragent at the intersection to reserve conflict-free trajectoriesin intersection space-time [1]. In comparison to today’sintersection managers (traffic signals and stop signs), AIMdramatically improves traffic throughput in the case of a single intersection. However, little is known about coordinatingmultiple intersections using AIM in order to optimize trafficThis work has taken place in the Learning Agents Research Group(LARG) at UT Austin. LARG research is supported in part by NSF (IIS0917122), ONR (N00014-09-1-0658), and FHWA (DTFH61-07-H-00030).flow through a network of interconnected roads.1On the other hand, research in the traffic and transportationliterature has focused extensively on the interactions betweenmultiple intersections using traditional control mechanismssuch as stop signs and especially traffic signals. A currentfocus area is on dynamic traffic assignment (DTA) wherebycars adapt their routes, and signals adapt their timings, basedon current traffic conditions [2], [3], [4], [5].This paper pushes the boundaries of what can be donewith a multiagent-based approach to autonomous controlof multiple intersections. More than just applying DTA toAIM-based intersections, we consider the unique propertiesof AIM that enable novel, fine-grained, dynamic controlof autonomous vehicles through a grid of intersections.Specifically, we demonstrate how individual vehicles canleverage the information already available through the AIMprotocol to predict travel times along various routes anddynamically change their planned paths. Next, we observean instance of Braess’ paradox whereby opening additionaltravel options for the vehicles reduces the efficiency of allvehicles in the system. In response, we explore the possibilityof dynamically redirecting lanes in response to minute-byminute traffic conditions. Throughout the paper we assumethat each car is an autonomous agent interested in minimizingits own individual travel time. At no point do the cars acceptredirection from any outside decision-maker. We examinethe resulting multiagent system and, consistent with theoriginal AIM results, demonstrate the significant potentialimprovements compared to current control mechanisms whentaking advantage of the capabilities of autonomous vehicles.AUTONOMOUS I NTERSECTION M ANAGEMENT (AIM)This multiagent systems-based intersection managementstrategy, introduced by Dresner and Stone, employs a reservation protocol in which vehicles (driver agents) who wishto cross an intersection will contact the Intersection Manager(IM) agent responsible for managing that particular intersection and reserve a trajectory through intersection space-time[1], much like a landing aircraft will contact an air trafficcontrol tower to reserve space along a certain runway at acertain time for its landing. The intersection manager decideswhether to grant or reject requested reservations according1 The few studies of multiple intersections in AIM have essentially juststrung individual intersections together, without considering their interactions.
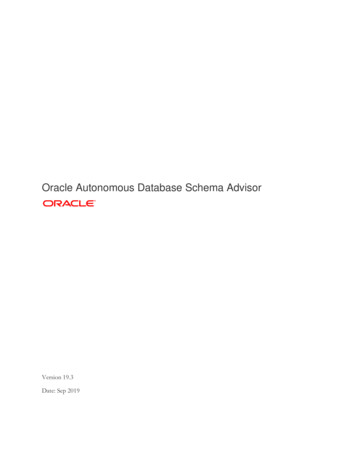
to an intersection control policy. A typical interaction goesas follows:1) An approaching vehicle announces its impending arrival to the intersection manager. The vehicle indicatesits size, predicted arrival time, velocity, acceleration,and arrival and departure lanes.2) The intersection manager simulates the vehicle’s paththrough the intersection, checking for conflicts with thepaths of any previously processed vehicles.3) If there are no conflicts, the intersection manager issuesa reservation. It becomes the vehicle’s responsibilityto arrive at, and travel through, the intersection asspecified (within a range of error tolerance).4) The car may only enter the intersection once it hassuccessfully obtained a reservation.Fig. 1: Diagram of the intersection system.(a) Successful(b) RejectedFig. 2: (a) The vehicle’s space-time request has no conflicts at timet. (b) The black vehicle’s request is rejected because at time t ofits simulated trajectory, the vehicle requires a tile already reservedby another vehicle. The shaded area represents the static buffer ofthe vehicle.Figure 1 diagrams the interaction between driver agentsand an intersection manager. A key feature of this paradigmis that it relies only on vehicle-to-infrastructure (V2I) communication2 . In particular, the vehicles need not know anything about each other beyond what they need for local control (e.g. to avoid running into the car in front). The paradigmis also completely robust to communications disruptions:if either the intersection manager or the vehicle drops amessage, delays may increase, but safety is not compromised.AIM also guarantees safety when both autonomous andmanual vehicles operate at intersections. The intersectionefficiency will increase with the ratio of autonomous vehiclesto manual vehicles in such scenarios.The prototype intersection control policy divides the intersection into a grid of reservation tiles, as shown in Fig. 2.2 V2Vwas later introduced for low-traffic intersections.When a vehicle approaches the intersection, the intersectionmanager uses the data in the reservation request regarding thetime and velocity of arrival, vehicle size, etc. to simulate theintended journey across the intersection. At each simulatedtime step, the policy determines which reservation tiles thevehicle will occupy. If at any time during the trajectorysimulation the requesting vehicle occupies a reservation tilethat is already occupied by another vehicle, the policy rejectsthe driver’s reservation request, and the intersection managercommunicates this to the driver agent. Otherwise, the policyaccepts the reservation and reserves the appropriate tiles. Theintersection manager then sends a confirmation to the driver.If the reservation is denied, it is the vehicle’s responsibility tomaintain a speed such that it can stop before the intersection.Meanwhile, it can request a different reservation.Empirical results in simulation demonstrate that the proposed reservation system can dramatically improve the intersection efficiency when compared to traditional intersectioncontrol mechanisms. To quantify efficiency, Dresner andStone measure delay, defined as the amount of additionaltravel time incurred by a vehicle as a result of passingthrough the intersection under external traffic load compared to travel time of the vehicle passing through thesame intersection without any other cars. According to theirexperiments, the reservation system performs very well,nearly matching the performance of the optimal policy, whichrepresents a lower bound on delay should there be no othercars on the road. Overall, by allowing for much finer-grainedcoordination, the simulation-based reservation system candramatically reduce per-car delay by two orders of magnitudein comparison to traffic signals and stop signs. Due tospace constraints, we cannot fully describe the details of theAIM protocol. For a complete specification, including how ithandles human drivers, pedestrians, dropped messages, andaccidents in the intersection, refer to [1].AIM has been studied extensively in the case of singleintersections. However, we now shift focus from prior workto our own contributions relating to extending the AIMprotocol from a single intersection to multiple intersections.NAVIGATION P OLICIESTransitioning from a single intersection to a grid ofintersections requires each driver agent to have a navigationpolicy which determines the route the vehicle takes towardsits destination. Vehicles are responsible for determining theirown paths through a network of roads and are requiredonly to make local reservations with the IM of the nextintersection they plan to traverse. This property allows agentsto revise their planned paths dynamically in light of newinformation about arising traffic conditions.Intersection Delay EstimationIn order for Intersection Managers to keep current information about incoming traffic, we modify the basic AIMprotocol by requring vehicles to send a notification messagebefore calling for a reservation. A vehicle sends this message as soon as it enters a road leading to an intersection
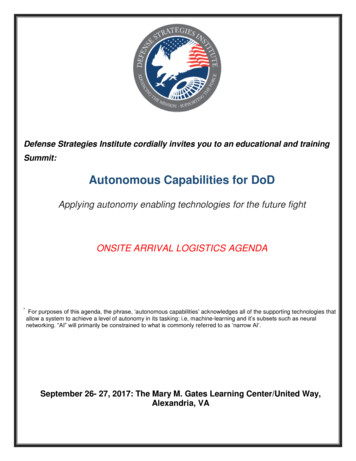
and comes within DSRC (Dedicated Short-Range Communication) range, approximately 300 meters. This message,typically sent long before a reservation request, informs theintersection manager that a vehicle will eventually requesta reservation and cross the intersection. Additionally, itconveys to the IM the road currently occupied by the vehicle(e.g. the road which enters the intersection) as well as theexit road the vehicle plans to depart on. Keeping track ofincoming notification messages, intersection managers nowpossess the required information to estimate and publish theexpected traversal times of incoming vehicles. (These delayestimates form the foundation of the time-based navigationpolicy discussed later.) In this case, traversal time equals thetime elapsed between when the vehicle sent a notificationmessage and the time that the vehicle successfully exits theintersection. In order to accurately estimate traversal timeof a querying vehicle, intersection managers consider thefollowing features:1) Total Active Vehicles (TAV): The total number of vehicles actively interacting with this intersection (vehiclesare considered active after they send a notificationmessage and before they finish traversing the intersection). Since AIM protocol requires vehicles only tomake reservations for the most proximate intersectionthey plan to traverse, this quantity represents a roughestimate of instantaneous total demand for this intersection.2) Path-Active Vehicles (PAV): The number of active vehicles along the querying vehicle’s planned (entry road,departure road) trajectory. More specialized than thelast, this metric gives an estimate of the instantaneousdemand along the vehicle’s planned path through theintersection. Intuitively, a small number of path-activevehicles may indicate low delays along a certain pathdespite a large number of total active vehicles.3) Oldest Path-Active Vehicle (oPAV): The time at whichthe oldest active vehicle along the querying vehicle’splanned (entry road, departure road) trajectory notifiedthe intersection manager of its presence. In steady statetraffic (e.g. delays are neither systematically increasingor decreasing), the traversal time of the oldest activevehicle closely approximates the traversal time of anew vehicle along the same path.4) Temporal Window Average (TWA): The average traversal time along the querying vehicle’s planned trajectoryof all vehicles who successfully crossed the intersection within the last n seconds. In our experiments,using a temporal window over the last n 50 secondsallowed traversal time averages to adapt reasonablyquickly to influxes of traffic while not being overlysensitive to minute fluctations and noisy data.Intersection managers calculate traversal time estimatesfrom the following linear combination of features:estT T .09TAV .83PAV .25oPAV .25TWA 2.26 (1)We developed Equation 1 by simulating a single intersection for 2000 seconds with 9297 incoming vehicles/hour. Asevery vehicle traversed the intersection, the value of each ofthe above features was recorded as well as the actual traversaltime of that vehicle. We derived the weights in Equation 1via linear regression on the resulting dataset, which yieldeda mean absolute prediction error of less than seven seconds.Using this equation, intersection managers answer queriesfrom incoming vehicles about expected traversal times.Notably, the weights in Equation 1 reflect the flow-patternof incoming traffic. The flow pattern used here mimicked anintersection under an average, evenly distributed load. As thisflow changes, we expect corresponding changes in traversaltimes. Adapting the weights in Equation 1 to changing trafficflow-patterns remains a subject of future work.Time-based A*Leveraging the expected traversal time estimates providedby intersection managers, the time-based A* navigationpolicy performs an A* search [6] starting from the vehicle’scurrent location and terminating at the vehicle’s destination.Each possible path through the grid of intersections is sortednot on the distance of that path, but instead on the path’sexpected travel time. The expected travel time of a path iscalculated by summing the traversal time estimates providedby each intersection manager incident along the path. Upontermination, the search returns the route which minimizesexpected traversal time. Since intersection managers provide no guarantees against over-estimating traversal times,the heuristic we propose is not strictly admissible (e.g. ifintersection managers provide poor estimates, A* is notguaranteed to return the minimum time path). Despite this,empirically it has performed well.Since AIM protocol requires vehicles to send a notificationmessage only to the most proximate intersection manager,they are free to dynamically re-plan routes using updateddelay estimates as frequently as desired. We hypothesize thatdriver agents employing the time-based A* navigation policywill adapt far better to changing traffic conditions than agentsfollowing distance-based shortest path navigation policies.Experimental EvaluationWe empirically evaluate the time-based A* navigationpolicy on a 2 2 grid of intersections shown in Figure 3.Persistent traffic with flow 4500 vehicles/hour enters the gridat point A and exits at point D (A D), utilizing either path{A, 0, 2, 3, D} or {A, 0, 1, 3, D}. We designate this flow theTraffic of Interest (ToI) and study how well the individualdriver agents constituting this flow can adapt their paths toavoid sporadic influxes of heavy traffic.The scenario subjects the traffic of interest to two differentinfluxes of sporadic traffic (B E and C E), with flow9000 vehicles/hour. Each influx of sporadic traffic lasts for100 seconds and is followed by the alternate influx after acooldown period of 100 seconds. Finally, we add randomsource, destination traffic to the scenario with a flow of 900vehicles/hour on all roads except A, B, and C (as thesespawn other flows). The goal of the scenario is for the ToI toleverage delay estimates provided by intersection managers
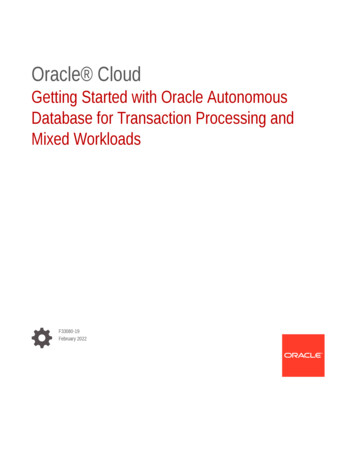
in order to dynamically adjust to the influxes of sporadictraffic and utilize routes of minimum traversal time throughthe road network.CAB01Non-AdaptiveSpatial A*ToI Time-based A*All Time-based A*OmniscientGlobalThrghpt(cars)2349 2439 2591 2550 2616 1211121214ToIThrghpt(cars)733 8.9980 8.51008 9.2981 7.11020 7.9GlobalAvg Delay(seconds)69.7 .6553.3 1.440.5 1.650.3 1.636.8 1.2ToIAvg Delay(seconds)133.5 1.955.1 3.026.9 2.146.4 2.326.2 2.1TABLE I: Delay and throughput under different navigation policies.Throughput indicates the total number of cars who have reachedtheir destinations before the simulation ends. Average Delay is theaverage, per-vehicle delay experienced. Global indicates the metricwas applied globally while ToI designates the metric was appliedonly to the Traffic of Interest. denotes a 95% confidence interval.23NavigationPolicyDEFig. 3: 2 2 grid used for testing navigation policies. IntersectionManagers are outlined in gray. The Traffic of Interest (ToI) travelsfrom A to D along paths {A, 0, 2, 3, D} and {A, 0, 1, 3, D}.Sporadic traffic flows alternate between entering at B and C andboth exit at destination E. Paths taken by sporadic traffic typicallyfollow the direct route (e.g. {B, 1, 3, E} and {C, 2, 3, E}) butin some cases may take the longer routes {B, 1, 0, 2, 3, E} and{C, 2, 0, 1, 3, E}. Random source-destination traffic enters on allroads except A, B, and C.This serves as an unachievable performance bound asit allows driver agents to instantaneously adapt to theinfluxes of sporadic traffic, exclusively utilizing theroute of minimum conflict at all times.5) Non-Adaptive: Intersection delay estimates are heldconstant, causing the ToI to fail to adapt to sporadictraffic. All other cars navigate with Spatial A*.Table I depicts the throughput and delays experienced bythe traffic of interest as well as the overall system whendriver agents employ different navigation policies. The timebased A* navigation policies significantly3 reduce delays,both global and local to the ToI, in comparison to the SpatialA* navigation policy. Throughput increases as well. The nonadaptive policy performs far worse than others on accountof its failure to adapt beyond the initial influx of traffic(e.g. use of a very high conflict route). These results inAIM highlight the ability of the intersection managers todynamically influence driver agents’ routes by providing upto-date information about expected delays.Traffic SignalsFig. 4: Screenshot of the AIM GUI showing experimental scenario.Using this scenario, we evaluate the following navigationpolicies for 1000 seconds of simulated time:1) Spatial A*: All vehicles navigate using a distance basedA* search, in which the shortest distance routes arefavored without regard to traffic congestion or delays.Ties between equi-distant routes are broken arbitrarily.2) ToI Time-based A*: Vehicles belonging to the trafficof interest (ToI) utilize the time-based A* navigationpolicy. All others navigate using Spatial A*.3) All Time-based A*: All vehicles navigate using thetime-based A* algorithm.4) Omniscient: In the omniscient scenario, the ToI has access to perfect future knowledge about incoming trafficflows, which is not available in any other scenario.To compare the efficiency of multi-intersection AIM tomore traditional traffic control mechanisms, we benchmarkeach of the navigation policies against an idealized implementation of traffic signals. These traffic signals computethe cumulative wait of cars on all incoming roads and give agreen light to the incoming road with the highest cumulativewait (as well as to its dual – the adjacent, parallel roadrunning in the opposite direction). As Equation 2 indicates,the cumulative wait of cars on a road r equals the sum oftheir individual waits, where the wait of a vehicle is theelapsed time since its arrival on r.XCumulative W ait(r) wait(vehiclei ) (2)vehiclei rWe design these idealized traffic signals to represent anupper bound on the efficiency of any real-world signal. Rightturns on red were also allowed to increase traffic efficiency.Table II depicts the results from the same set of experiments run in Table I only with optimal traffic signalsreplacing autonomous intersections. Side-by-side comparisonof these tables indicates that delays, both global and local3 Throughout this paper, 30 trials were used for each experiment andsignificance is measured based on an unpaired t-test yielding two-tailed Pvalues less than 0.0001
NavigationPolicyNon-AdaptiveSpatial A*ToI Time-based A*All Time-based A*OmniscientGlobalThrghpt(cars)2288 2388 2396 2433 2420 1513131112ToIThrghpt(cars)983 11909 11973 9929 8934 12GlobalAvg Delay(seconds)86.6 2.182.7 1.775.2 1.881.7 1.979.9 1.7ToIAvg Delay(seconds)60.6 4.193.3 2.767.4 2.385.1 3.089.2 2.8TABLE II: Navigation Policies evaluated under traffic signals ratherthan autonomous intersections.to the traffic of interest, rise significantly3 in all cases(except Non-Adaptive) when optimal traffic signals replaceautonomous intersections. Real-world traffic signals wouldalmost certainly incur much higher delays.E FFECTS OF N ETWORK T OPOLOGYAs we have demonstrated, both the navigation policiesof agents and the traffic control mechanism governing theintersections affect delays in a road network. An additionalfactor which we held constant throughout these experimentswas the topology of the road network. One might hypothesizethat once traffic reaches an equilibrium, adding additionalroads to a network would reduce overall delays. While thisis true in most cases, Braess’ Paradox is a well-known phenomenon whereby opening additional travel options for thevehicles reduces the efficiency of the system as a whole. Inthe next section we observe an instance of this phenomenonassociated with the experimental scenario discussed above.Formally, Braess’ Paradox is a phenomenon in whichadding additional capacity to a network, when moving entities selfishly choose their route, can in some cases reducethe overall performance [7]. Historically, this phenomenonhas been observed in South Korea, Germany, and New YorkCity where new roads increased delays for all vehicles [8],[9], [10]. We observe an instance of Braess’ paradox on the2 2 grid depicted in Figure 3, in which the opening of theNorthbound road connecting intersection 1 to intersection 0increases global delays.Similar to the scenario described previously, persistenttraffic flows from A to D along paths {A, 0, 2, 3, D} and{A, 0, 1, 3, D} with rate 4500 vehicles/hour. Heavy traffic(9000 vehicles/hour) flows from B to E. When the Northbound {1, 0} road is closed this traffic must flow along path{B, 1, 3, E}, but when this road is opened, traffic has theadditional option of taking the longer {B, 1, 0, 2, 3, E} route.Braess’ Paradox occurs when 1) despite the fact that carsminimize personal delay by selfishly choosing their routes, 2)overall efficiency declines when additional capacity is addedto the network. To address the second point, we referenceTable III which shows the significantly3 increased delaysand decreased throughput which result from opening theNorthbound {1, 0} road. Intuitively, when the Northboundroad is opened, some vehicles belonging to the heavy, B Etraffic flow divert from the direct {B, 1, 3, E} path to thelonger {B, 1, 0, 2, 3, E} path. This results in a high-conflicttrajectory through intersection 3. Congestion forms first atthe Westbound entrance to intersection 3, creating an incentive for more drivers to use the longer {B, 1, 0, 2, 3, E} path.This results in even higher congestion through intersectionRoad StatusClosedOpenThroughput (cars)2021 6.71821 5.4Avg Delay (seconds)43.28 .2464.91 1.22TABLE III: Increased delays result from opening an additional road.3. The cycle continues until an equilibrium is reached withroughly equal traversal times on both the long and short pathsand high delays for all.It might seem that Condition 1 wouldn’t hold since selfish agents rarely forgo direct routes to their destinations.However, empirical evidence shows that the first cars totake the direct {B, 1, 3, E} path deal with a delay of 52.35seconds while their counterparts who take the longer but lesstrafficked {B, 1, 0, 2, 3, E} path experience average delays ofonly 38.64 seconds.To summarize, in this section we have demonstratedthat when driver agents selfishly choose their routes andadditional capacity is added to the network in Figure 3,overall efficiency can suffer. Braess’ paradox presents aninteresting challenge to traffic engineers because it highlightsthe need for dynamic reconfiguration of network topology inresponse to changing traffic conditions. In the next sectionwe explore one possible approach to this issue by introducing a methodology for reconfiguring network topology bydynamically reversing the flow of traffic along lanes.DYNAMIC L ANE R EVERSALThe reversal of traffic and reconfiguration of lanes viamovable barriers has been implemented on several highwaysand bridges throughout the US, Canada and UK. Typicallyseparation is achieved through barriers or markers whichmust be reconfigured to open and close lanes, often requiringconsiderable effort and time. As a result, lanes are usuallyonly reconfigured twice a day to handle rush hour traffic.Barrier transfer machines (also known as zipper machines)can reduce the manual effort required to reconfigure a lanebut are expensive, move at slow speeds (3-4 mph), and stillrequire human drivers.More recently, reversible lanes have been implementedusing overhead signs which indicate the direction of a lane.Tested in Atlanta and Washington, DC, these overhead signshave potential to reverse the direction of lane far faster thanbarrier transfer mechanisms, but little is known about thesafety of such quick reversals. Furthermore there have beenreports of extensive driver confusion and malfunctions [11].The AIM protocol affords the ability to safely reversetraffic along lanes on a fine-grained timescale. Withoutreliance on a physical barrier, an intersection manager mayreverse the flow of traffic along a lane in approximately15 seconds, allowing the road network to adapt quickly tounforeseen fluctuations in traffic.In our prototype implementation of this idea, an intersection manager polls the demand on connected outlet roads(e.g. all traffic exiting on these roads must pass throughthe intersection) every two seconds and reverses the flow oftraffic on a lane l belonging to an outlet road r if it detectsenough demand detected on rdual , the road flowing in the
ars)4300 264303 24ToIThroughput(cars)1431 121434 12GlobalAvg Dly(seconds)263.89 4.4163.34 5.2ToIAvg Dly(seconds)348.23 8.8113.01 4.1TABLE IV: Reduced delays resulting from Dynamic Lane Reversal.opposite direction. For example if l is an Eastbound lane,and the intersection manager determines the total demandfor Westbound lanes is some constant factor N larger thanthe total demand for Eastbound lanes, it converts l into aWestbound lane (experimentally we used N 1.5). Equation3 expresses the condition to expand the capacity of r byreversing the flow on a lane belonging to its dual, rdual .demand(r) N demand(rdual )(3)An intersection manager determines the demand for anincident road r by counting the number of vehicles whohave expressed intent (in the form of a notification messageor reservation) to cross the intersection and exit on road r.After deciding to reverse traffic on a lane l, the IM adds lto a list of clearing lanes, and waits for all vehicles currentlyoccupying l to clear. At this point the IM rejects all attemptsto make reservations through the intersection which result ina vehicle entering l. When the intersection manager detectsthat all traffic on l has cleared, it removes l from the list ofclearing lanes and begins accepting westbound reservationson l. The length of time required for l to clear depends onthe length of the lane as well as traffic conditions at the exitof l, but typically requires less than 20 seconds.To test the efficacy of dynamic lane reversals, we revisitthe experimental scenario described previously (section Experimental Evaluation), this time increasing the number ofincoming cars along all roads by changing the number oflanes on external road segments (e.g. {A, 0},{B, 1},{D, 3},etc) from 3 to 5 in each direction (a 67% increase intraffic flow). Everything else is preserved between the twoscenarios, including the number of internal road segments(e.g. those between intersections), which still consist of 6total lanes. Thus, to accommodate 5 lanes of heavy traffic,two of the 3 lanes in the opposing direction should have theirflow reversed, resulting in 5 open lanes in the direction ofheavy traffic and 1 open lane in the opposite direction.Table IV shows results with and without dynamic lanereversals active on a 1000-second simulation. While throughputs are comparable in both cases, the ability of AutonomousIntersection Managers to effectively adapt to incoming flowsof traffic and open additional lanes results in significantly3reduced delays, suggesting that dynamic lane reversals,coordin
systems approach to trafc intersection management called Autonomous Intersection Management (AIM) in which ve-hicles (driver agents) call ahead to a reservation manager agent at the intersection to reserve conict-free trajectories in intersection space-time [1]. In comparison to today's intersection managers (trafc signals and stop signs), AIM